
一种巡检机器人悬挂安装座.pdf

努力****爱敏

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种巡检机器人悬挂安装座.pdf
本发明公开了一种巡检机器人悬挂安装座,安装座本体的前端外壁上安装有直线导轨,安装架上端外壁安装在直线导轨的滑块上,数个支撑杆的上端外壁分别焊接在支架的下端外壁左右两侧,支架上设置有数个吊环,支撑杆的左侧外壁上安装有控制器,控制器的下端外壁上安装有电源,机器人本体的左右两侧外壁上均安装有连接块,锁链的一端焊接在吊环的下端外壁上,锁链的一端焊接在连接块的上端外壁上;本发明通过控制器控制直线导轨上的滑块带动机器人本体滑动,通过限位块使得安装座本体更加牢固,机器人本体通过锁链连接设置在支架上的数个吊环,对机器人本
一种轨道悬挂智能巡检机器人系统.pdf
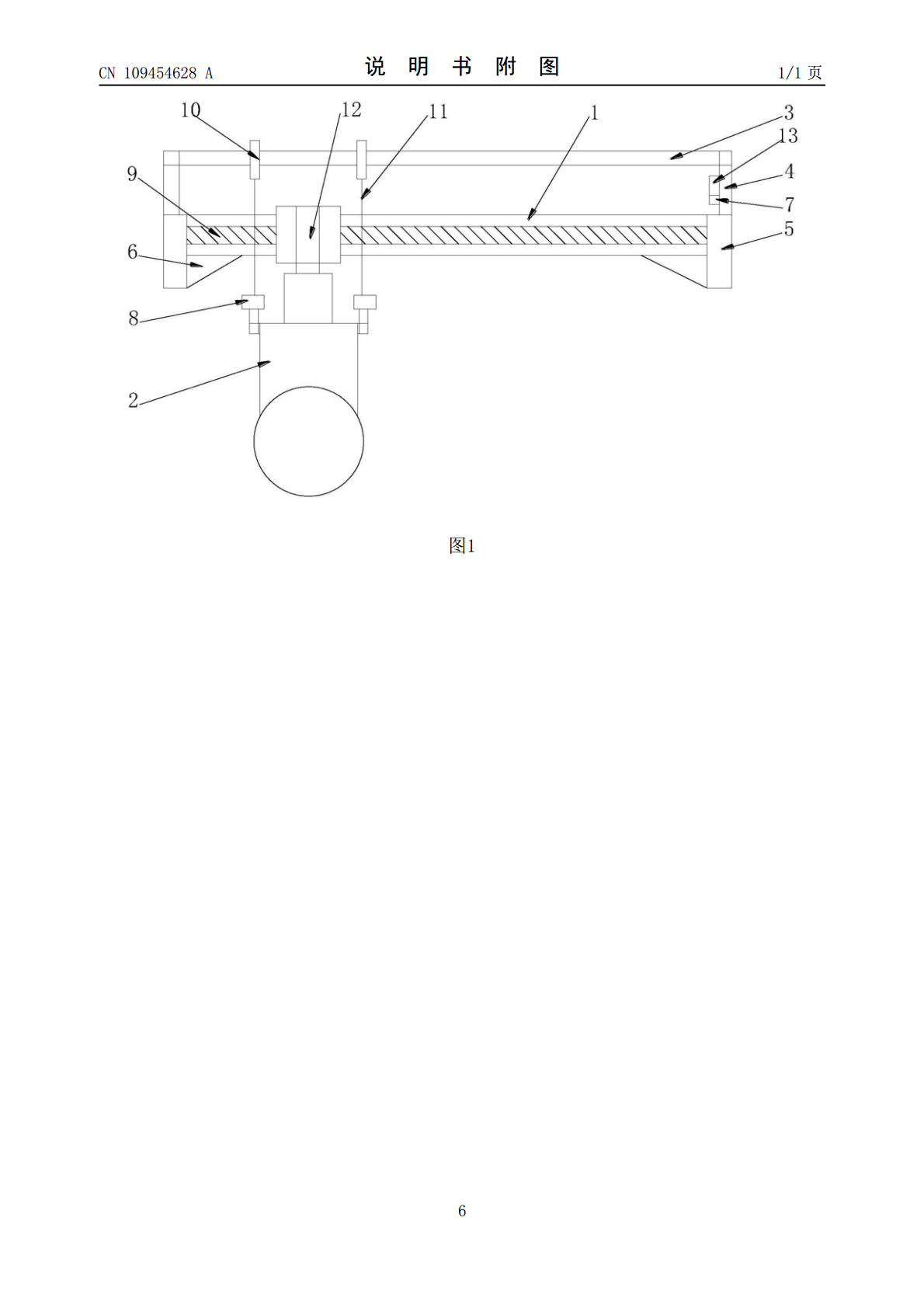
本发明涉及的是智能检测机器人领域,尤其涉及一种轨道悬挂智能巡检机器人系统。包括V形槽轨道、行走小车、升降机构和摄像旋转云台;V形槽轨道两侧分别装有滑触线和同步齿形带;行走小车包括旋转挂架、行走同步轮、摆动滑台、顶杆复位机构、行走小车步进伺服电机、行走小车上底座板和行走小车下底座板和连接杆;升降机构由升降机构步进伺服电机、蜗杆一、蜗杆支撑架、蜗轮一、丝杆传动轴、多级丝杆、丝杆螺母、固定导向杆、导向伸缩杆构成;摄像旋转云台由云台本体、摄像头转动机构、云台旋转机构组成;所述的摄像头转动机构包括摄像机转动轴、转动
一种悬挂式巡检机器人控制方法.pdf
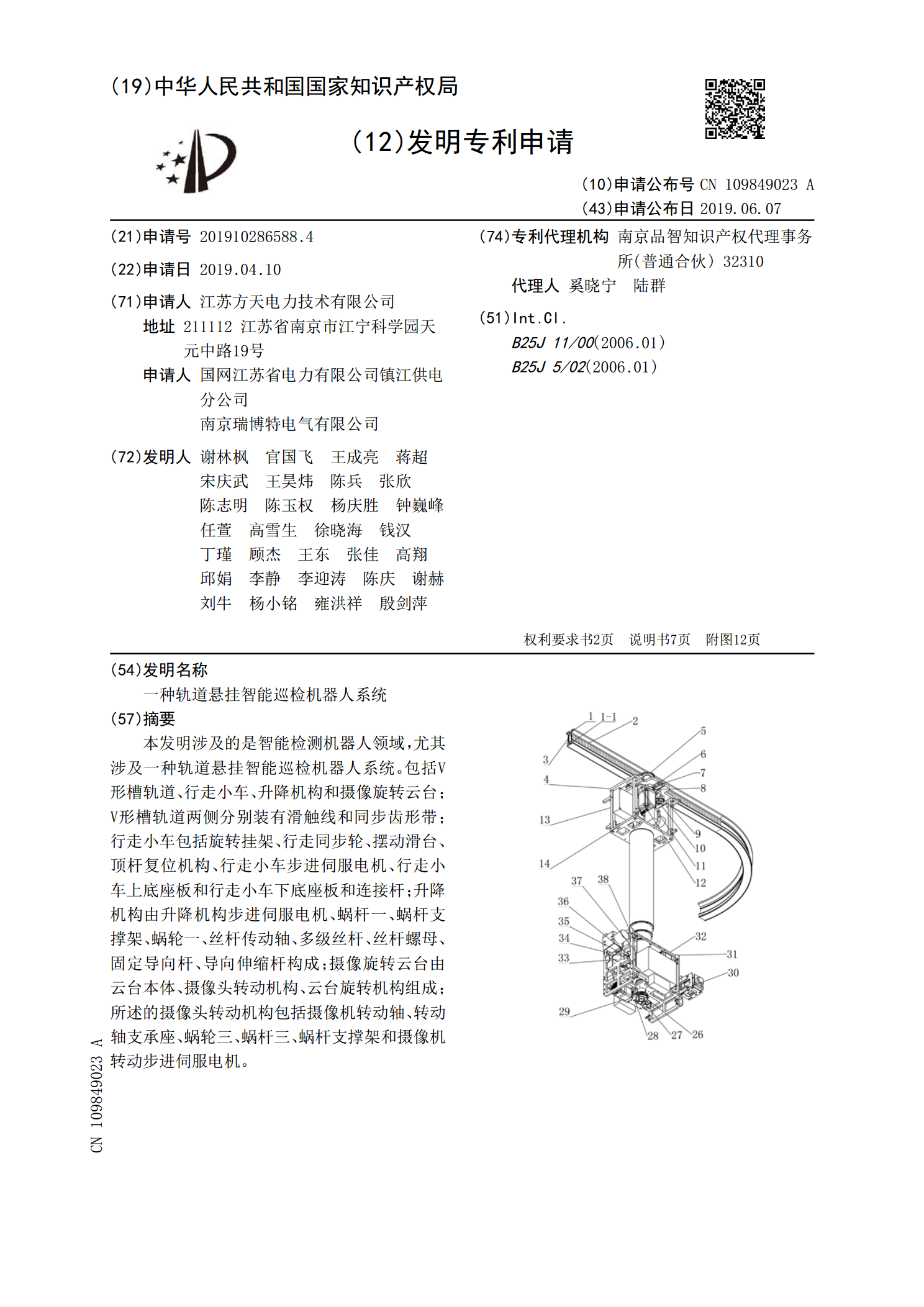
本发明公开了一种悬挂式巡检机器人控制方法,应用在悬挂式巡检机器人上,其特征在于,包括如下步骤:处理器获取所述悬挂式巡检机器人的行走类型;以及根据所述行走类型,切换至与所述行走类型相应的行走机构控制模式。本发明提供的悬挂式巡检机器人的控制方法可以根据巡检作业环境选择齿轮齿条啮合行走或者滚轮导轨滑动行走模式,根据巡检作业环境阻力控制悬挂式巡检机器人克服因天气和地形造成的高空巡检风阻大、低空巡检风阻小的环境阻碍,实现对于悬挂式巡检机器人的通用性使用。
一种悬挂式巡检机器人控制系统.pdf
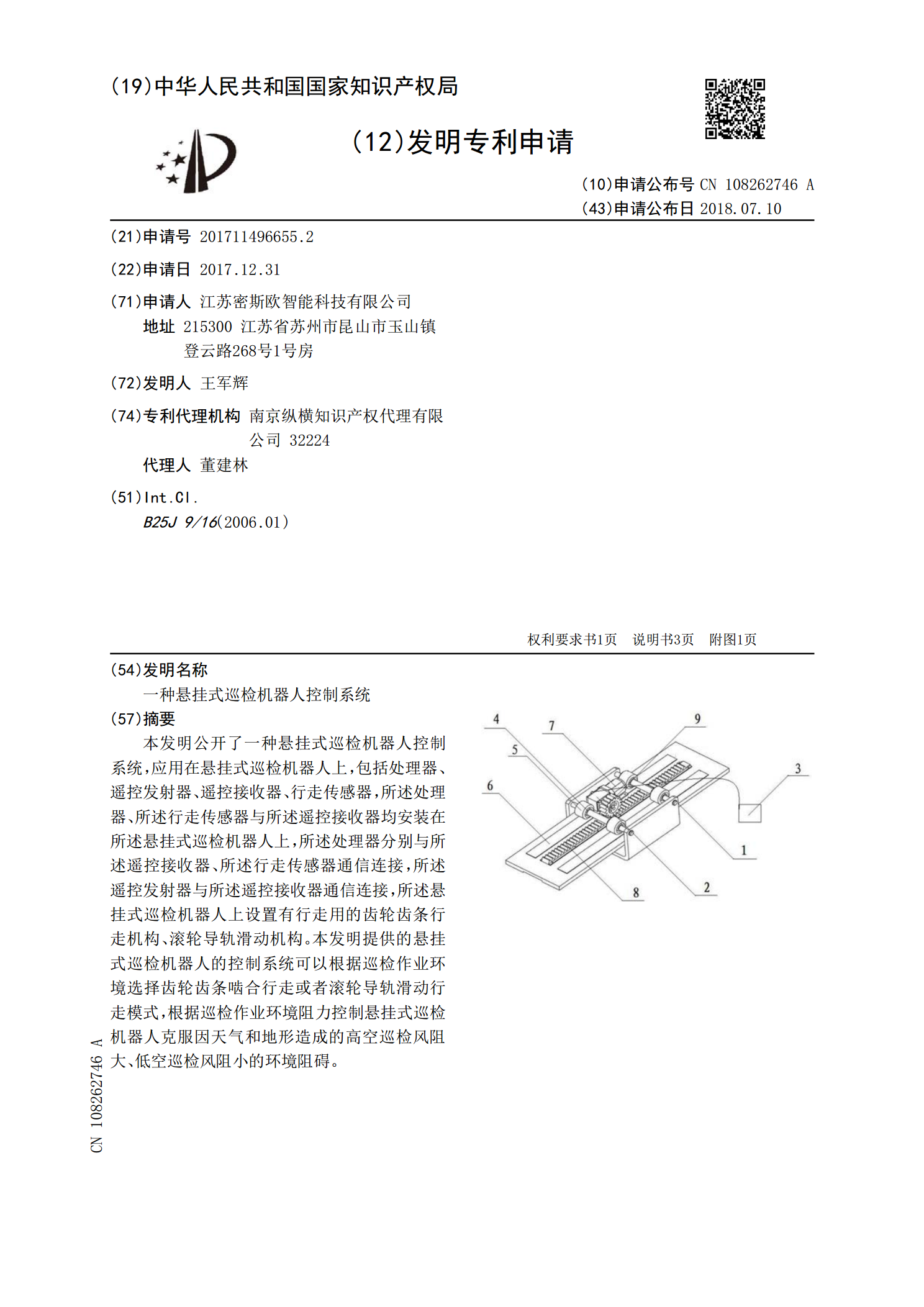
本发明公开了一种悬挂式巡检机器人控制系统,应用在悬挂式巡检机器人上,包括处理器、遥控发射器、遥控接收器、行走传感器,所述处理器、所述行走传感器与所述遥控接收器均安装在所述悬挂式巡检机器人上,所述处理器分别与所述遥控接收器、所述行走传感器通信连接,所述遥控发射器与所述遥控接收器通信连接,所述悬挂式巡检机器人上设置有行走用的齿轮齿条行走机构、滚轮导轨滑动机构。本发明提供的悬挂式巡检机器人的控制系统可以根据巡检作业环境选择齿轮齿条啮合行走或者滚轮导轨滑动行走模式,根据巡检作业环境阻力控制悬挂式巡检机器人克服因天

一种高压开关室悬挂轨道式智能巡检机器人的设计与应用.pptx
添加副标题目录PART01PART02结构设计控制系统设计传感器系统设计电源系统设计PART03巡检任务执行故障诊断与预警数据采集与分析提升运维效率PART04高效稳定智能诊断远程控制降低运维成本PART05高压开关室的巡检复杂环境的巡检远程监控的需求无人值守的场景PART06技术升级与创新应用领域的拓展智能化水平的提升满足更多定制化需求感谢您的观看