
多旋翼无人机全地形自平衡起降平台.pdf

含平****ng

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多旋翼无人机全地形自平衡起降平台.pdf
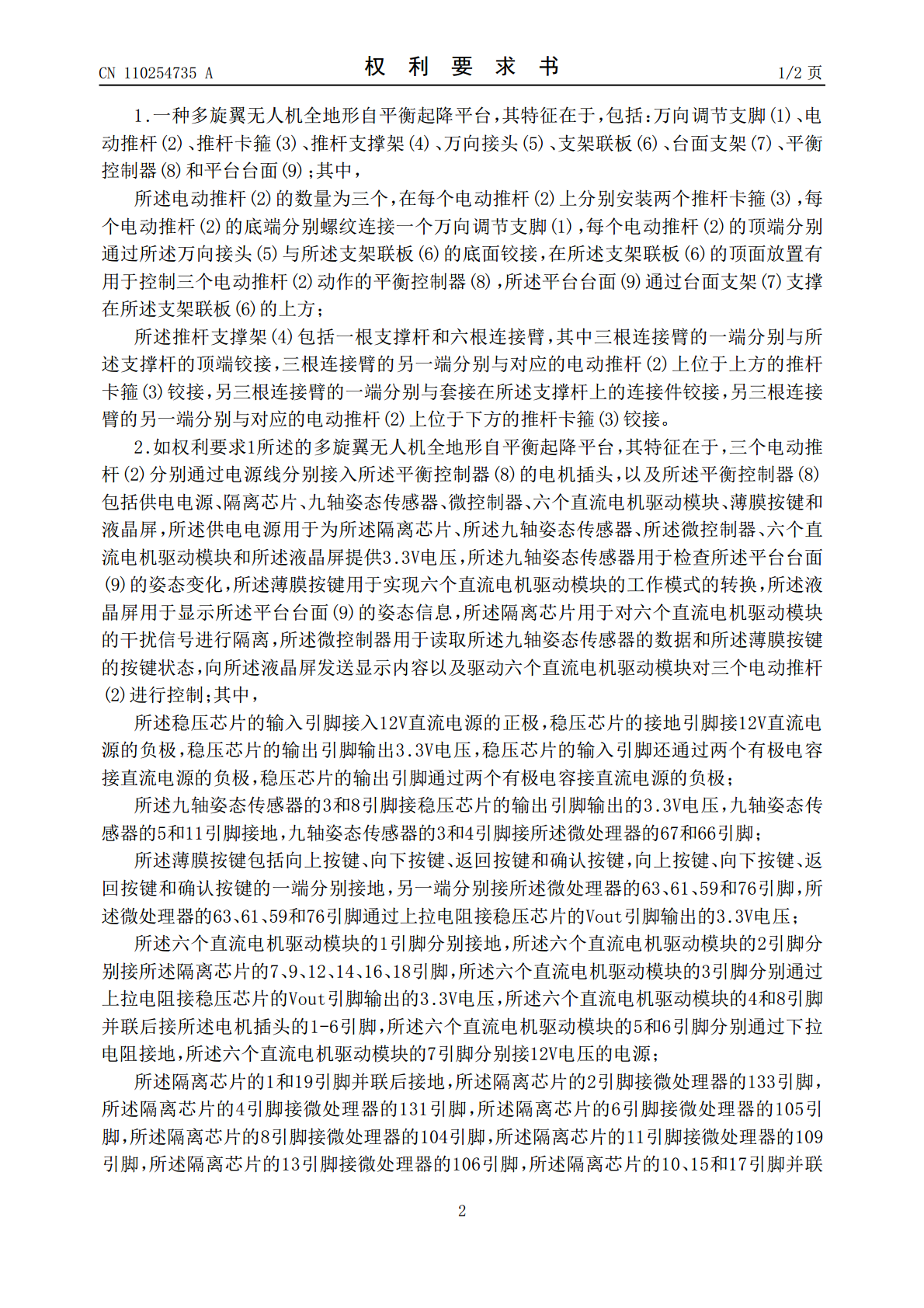
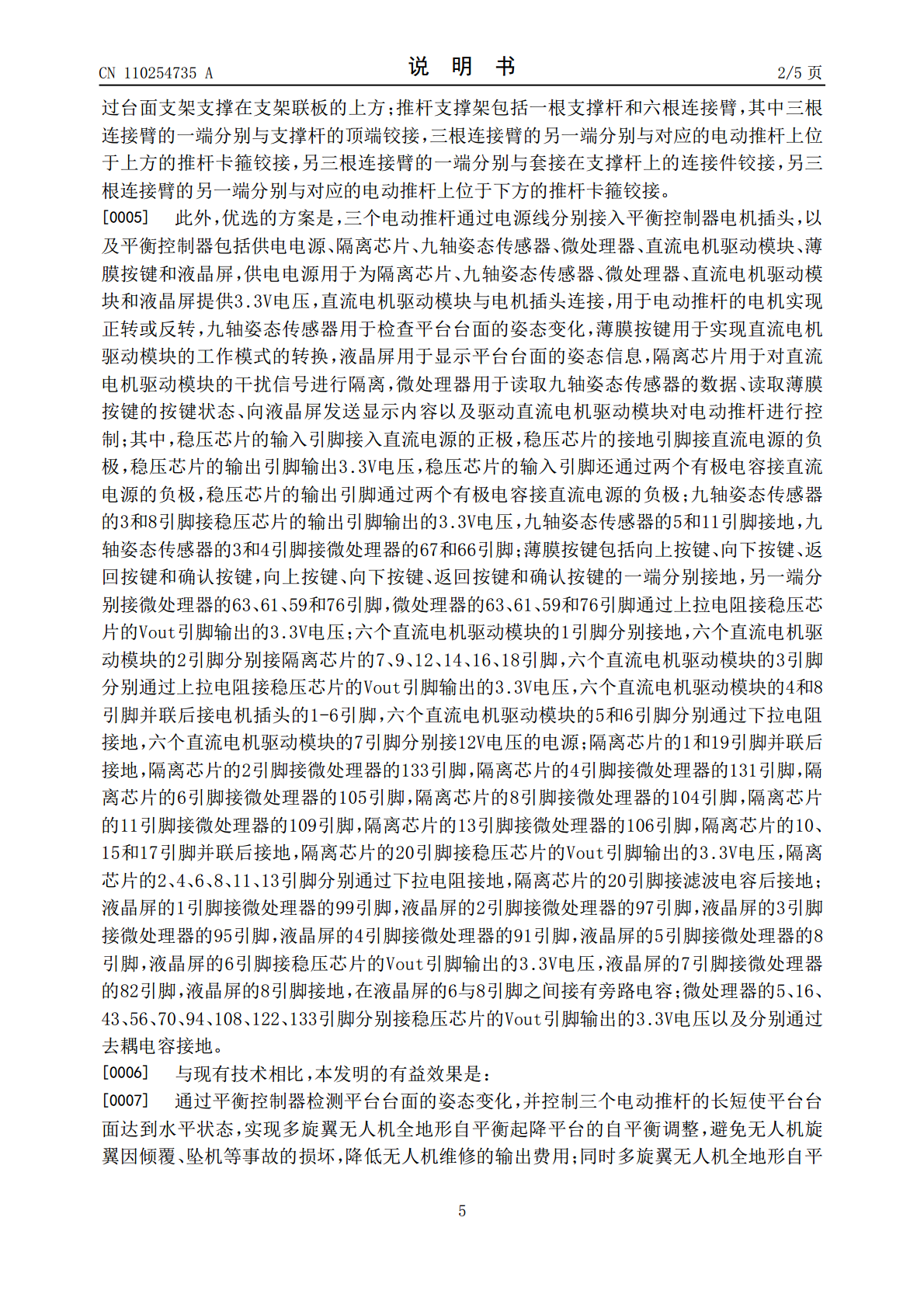
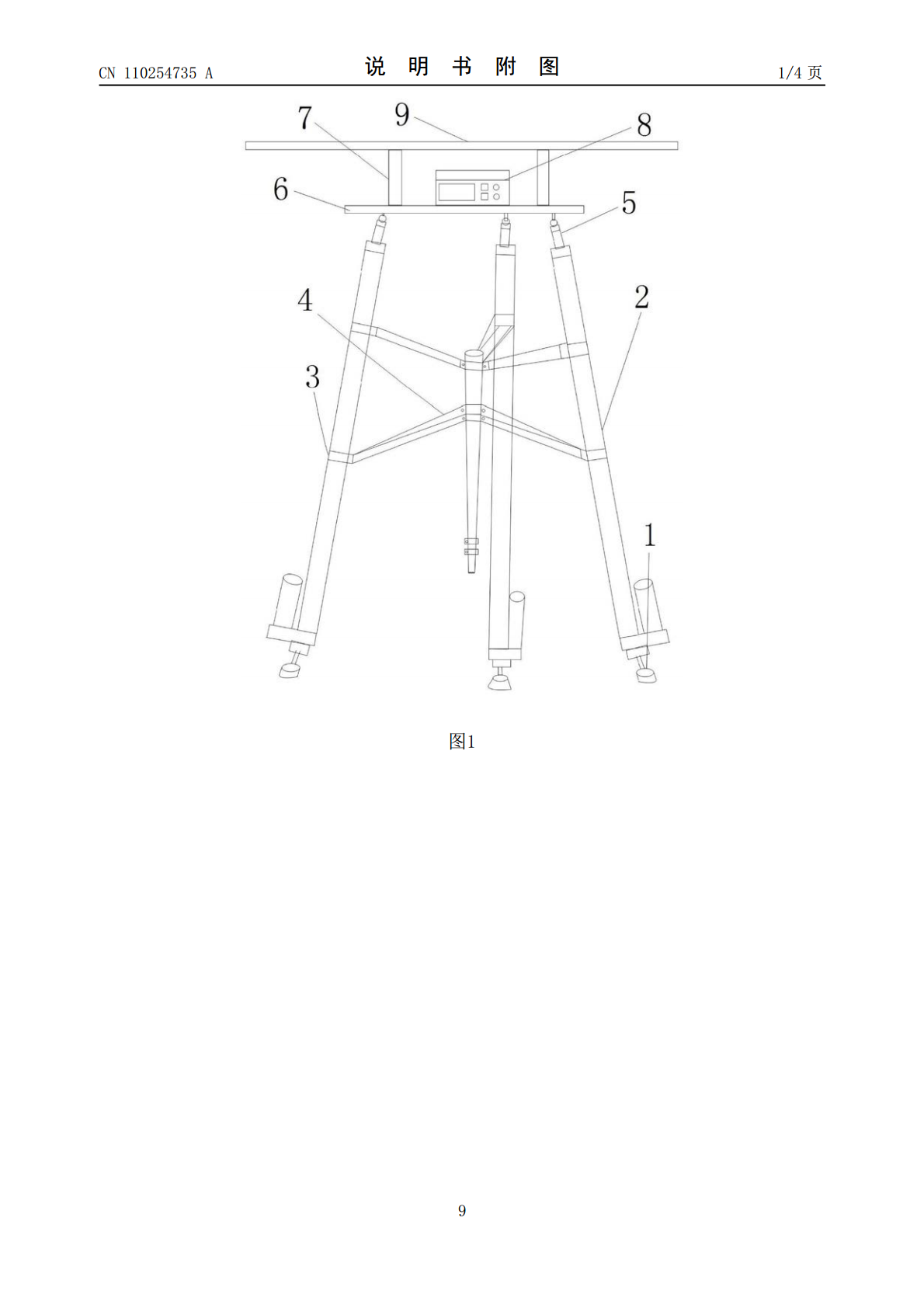
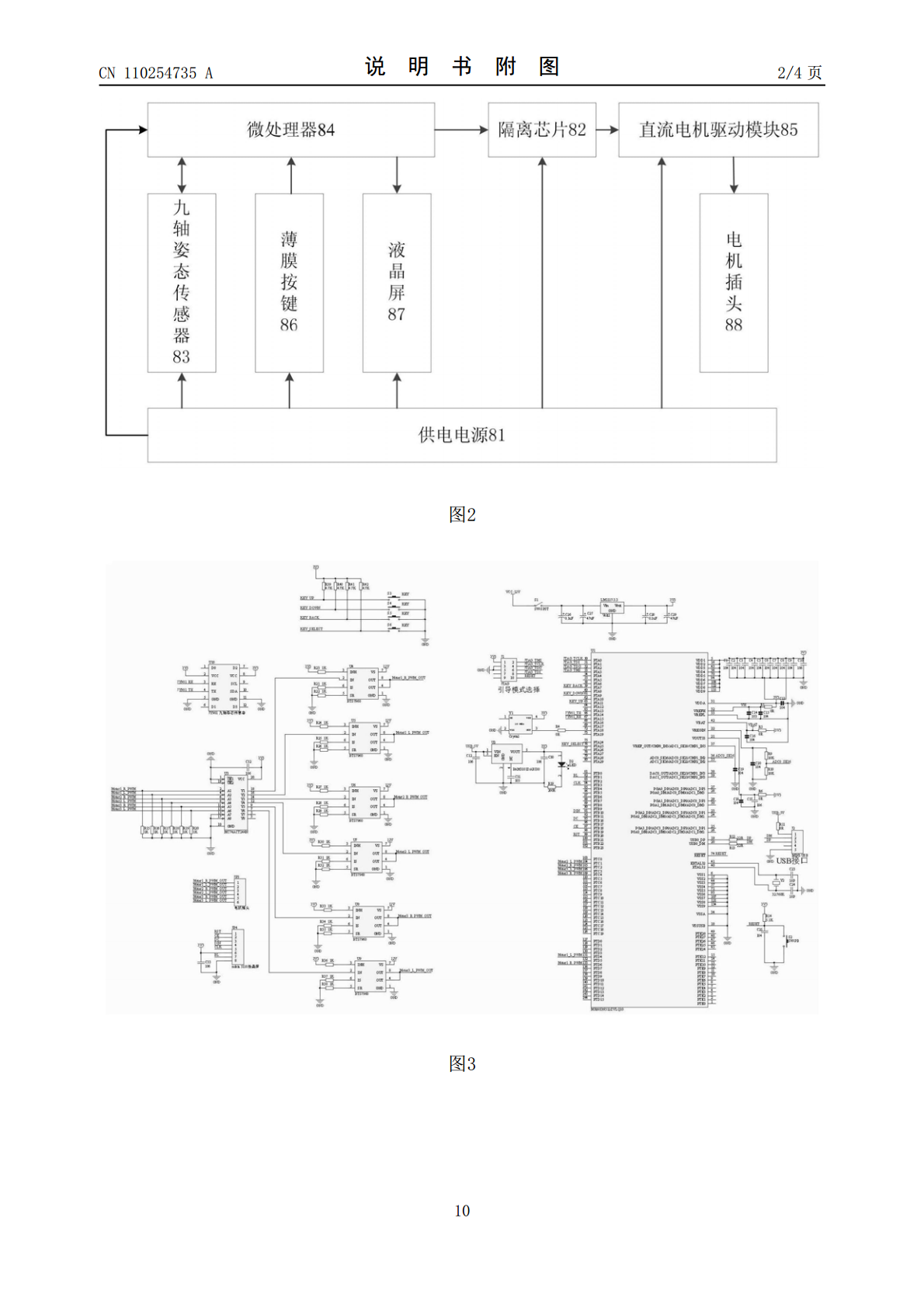
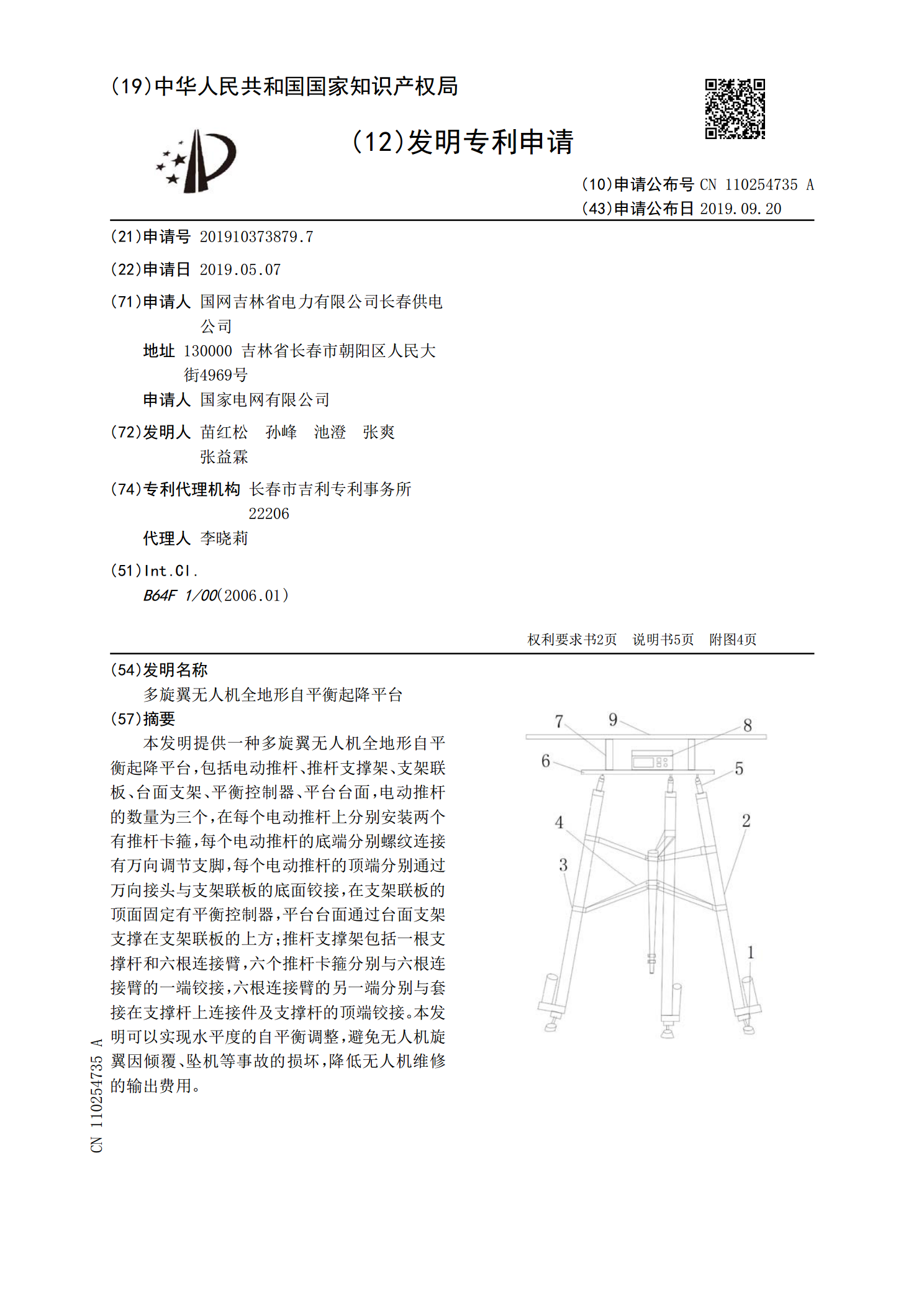
本发明提供一种多旋翼无人机全地形自平衡起降平台,包括电动推杆、推杆支撑架、支架联板、台面支架、平衡控制器、平台台面,电动推杆的数量为三个,在每个电动推杆上分别安装两个有推杆卡箍,每个电动推杆的底端分别螺纹连接有万向调节支脚,每个电动推杆的顶端分别通过万向接头与支架联板的底面铰接,在支架联板的顶面固定有平衡控制器,平台台面通过台面支架支撑在支架联板的上方;推杆支撑架包括一根支撑杆和六根连接臂,六个推杆卡箍分别与六根连接臂的一端铰接,六根连接臂的另一端分别与套接在支撑杆上连接件及支撑杆的顶端铰接。本发明可以实
一种支持多旋翼无人机空中起降的平台装置.pdf
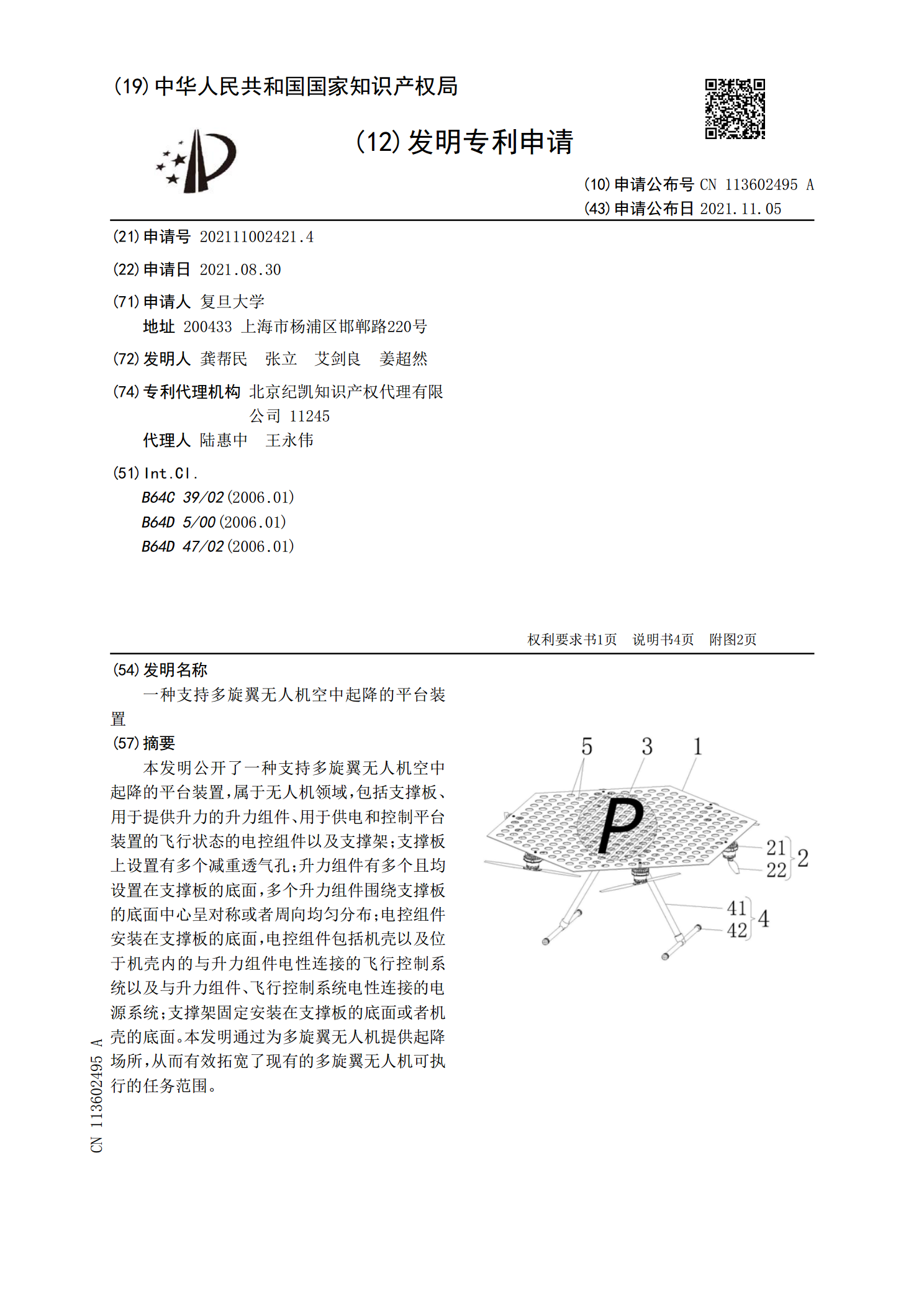
本发明公开了一种支持多旋翼无人机空中起降的平台装置,属于无人机领域,包括支撑板、用于提供升力的升力组件、用于供电和控制平台装置的飞行状态的电控组件以及支撑架;支撑板上设置有多个减重透气孔;升力组件有多个且均设置在支撑板的底面,多个升力组件围绕支撑板的底面中心呈对称或者周向均匀分布;电控组件安装在支撑板的底面,电控组件包括机壳以及位于机壳内的与升力组件电性连接的飞行控制系统以及与升力组件、飞行控制系统电性连接的电源系统;支撑架固定安装在支撑板的底面或者机壳的底面。本发明通过为多旋翼无人机提供起降场所,从而有
多旋翼无人机.pdf
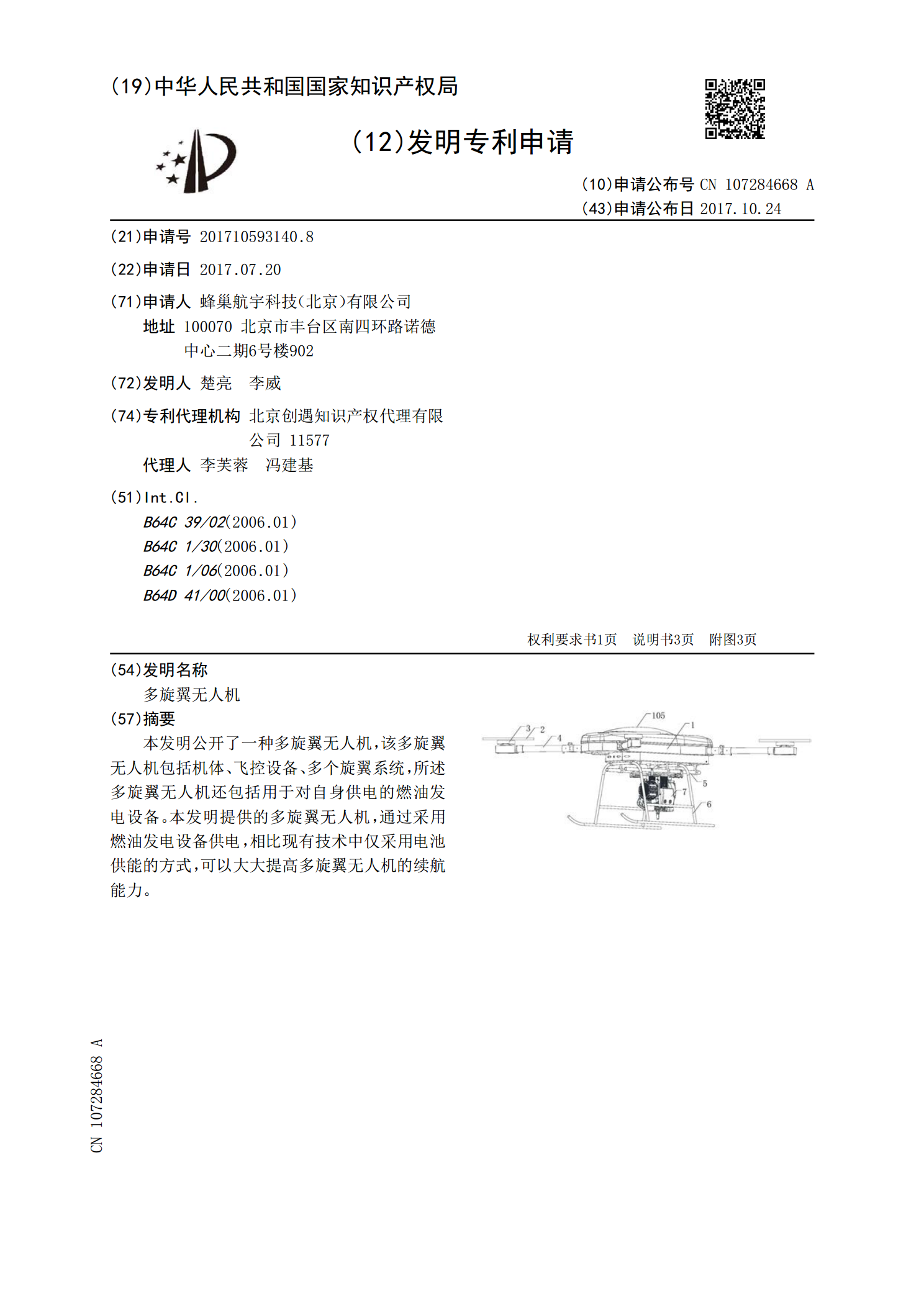
本发明公开了一种多旋翼无人机,该多旋翼无人机包括机体、飞控设备、多个旋翼系统,所述多旋翼无人机还包括用于对自身供电的燃油发电设备。本发明提供的多旋翼无人机,通过采用燃油发电设备供电,相比现有技术中仅采用电池供能的方式,可以大大提高多旋翼无人机的续航能力。
多旋翼无人机.pdf
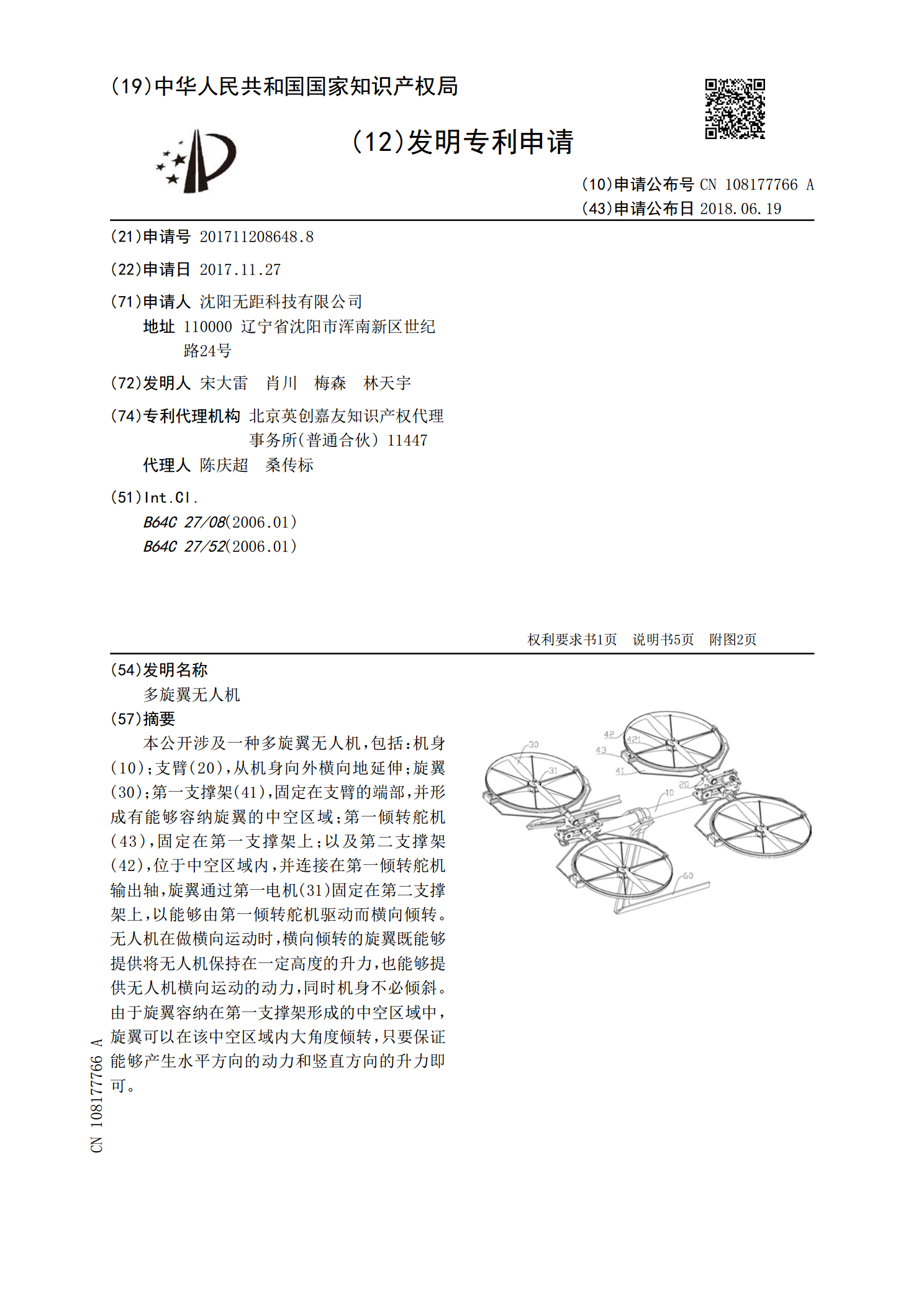
本公开涉及一种多旋翼无人机,包括:机身(10);支臂(20),从机身向外横向地延伸;旋翼(30);第一支撑架(41),固定在支臂的端部,并形成有能够容纳旋翼的中空区域;第一倾转舵机(43),固定在第一支撑架上;以及第二支撑架(42),位于中空区域内,并连接在第一倾转舵机输出轴,旋翼通过第一电机(31)固定在第二支撑架上,以能够由第一倾转舵机驱动而横向倾转。无人机在做横向运动时,横向倾转的旋翼既能够提供将无人机保持在一定高度的升力,也能够提供无人机横向运动的动力,同时机身不必倾斜。由于旋翼容纳在第一支撑架形
多旋翼无人机.pdf
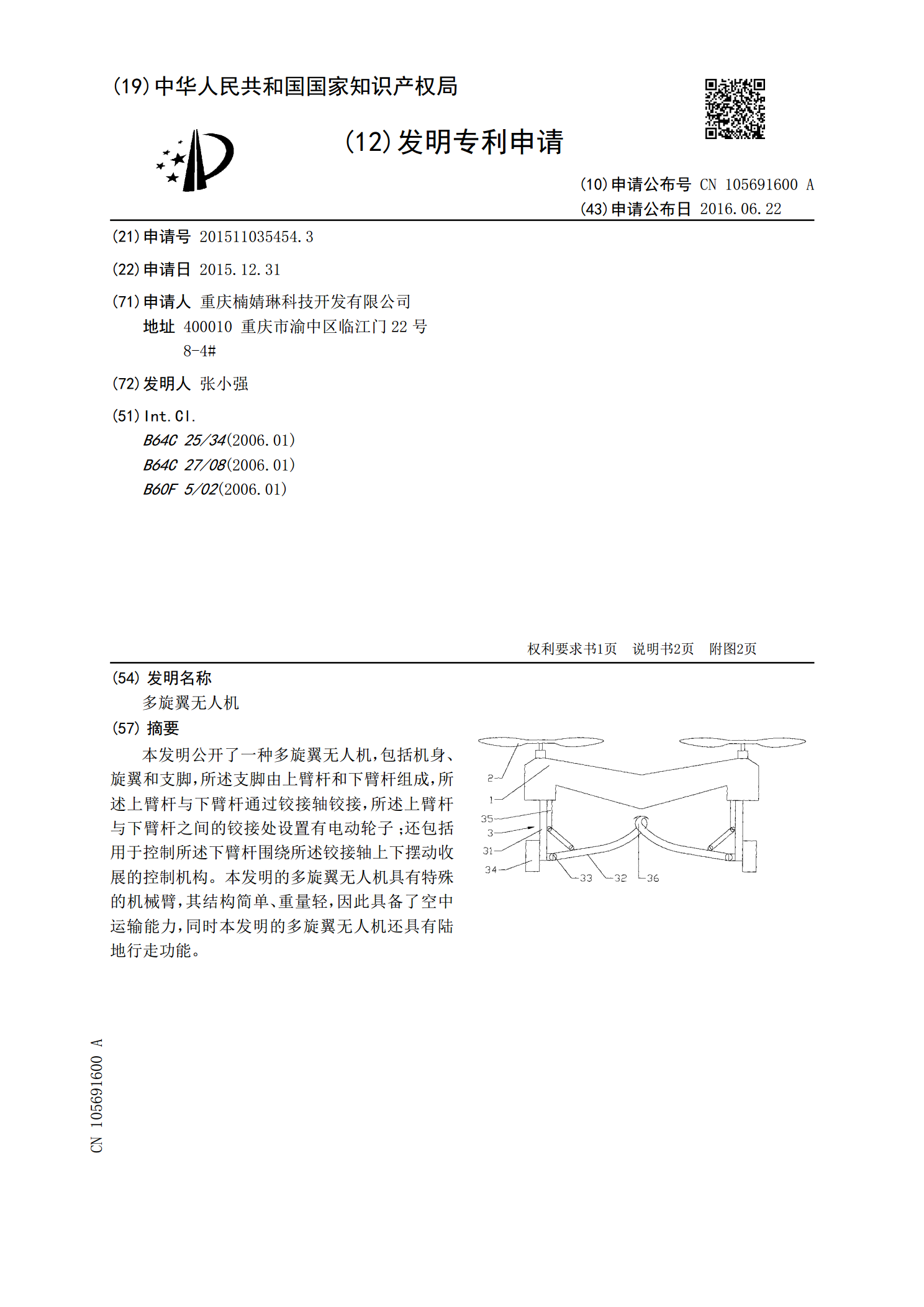
本发明公开了一种多旋翼无人机,包括机身、旋翼和支脚,所述支脚由上臂杆和下臂杆组成,所述上臂杆与下臂杆通过铰接轴铰接,所述上臂杆与下臂杆之间的铰接处设置有电动轮子;还包括用于控制所述下臂杆围绕所述铰接轴上下摆动收展的控制机构。本发明的多旋翼无人机具有特殊的机械臂,其结构简单、重量轻,因此具备了空中运输能力,同时本发明的多旋翼无人机还具有陆地行走功能。