
多旋翼无人机.pdf

文光****iu

1/9
2/9
3/9
4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
多旋翼无人机.pdf
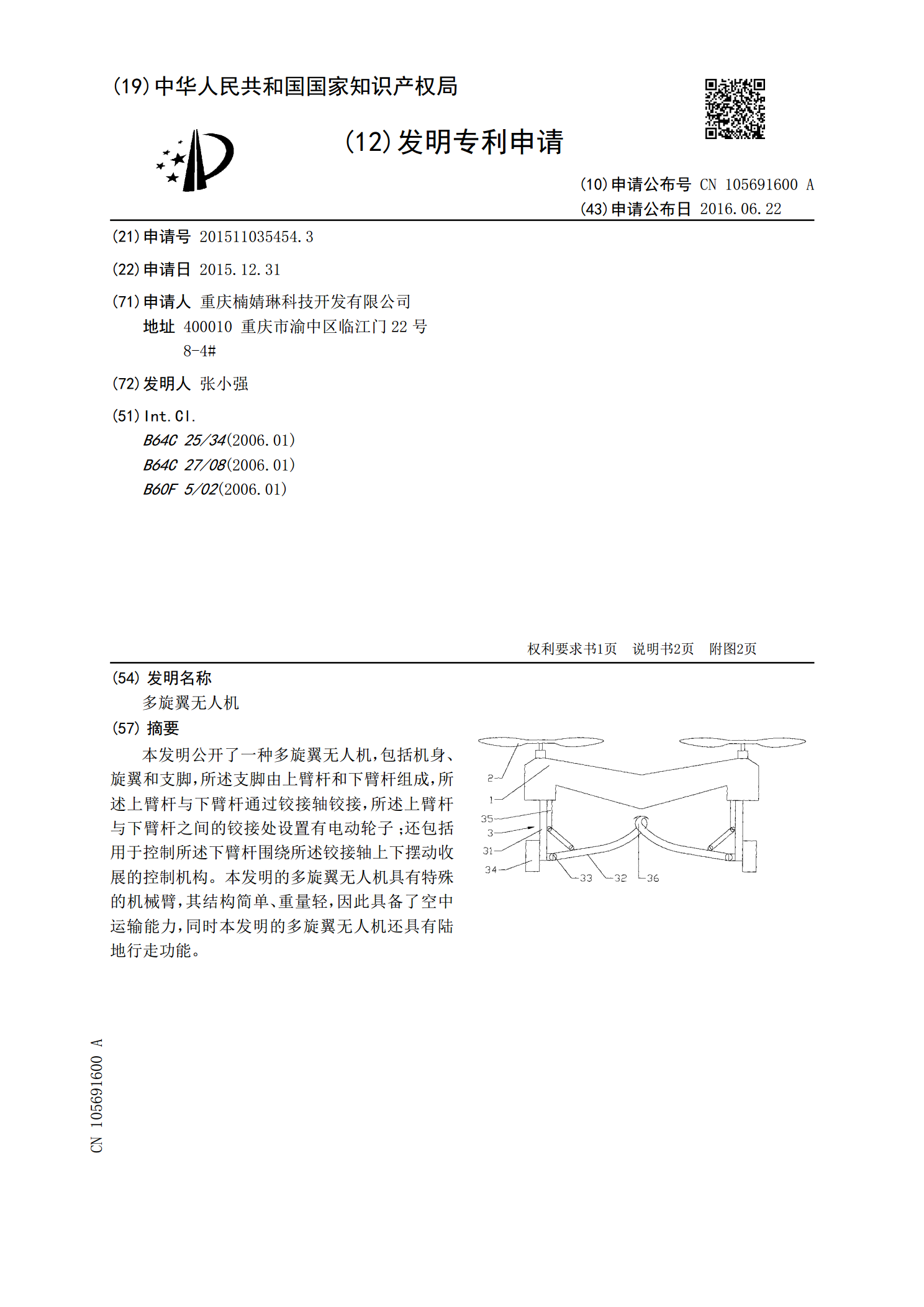
本发明公开了一种多旋翼无人机,包括机身、旋翼和支脚,所述支脚由上臂杆和下臂杆组成,所述上臂杆与下臂杆通过铰接轴铰接,所述上臂杆与下臂杆之间的铰接处设置有电动轮子;还包括用于控制所述下臂杆围绕所述铰接轴上下摆动收展的控制机构。本发明的多旋翼无人机具有特殊的机械臂,其结构简单、重量轻,因此具备了空中运输能力,同时本发明的多旋翼无人机还具有陆地行走功能。
多旋翼无人机.pdf
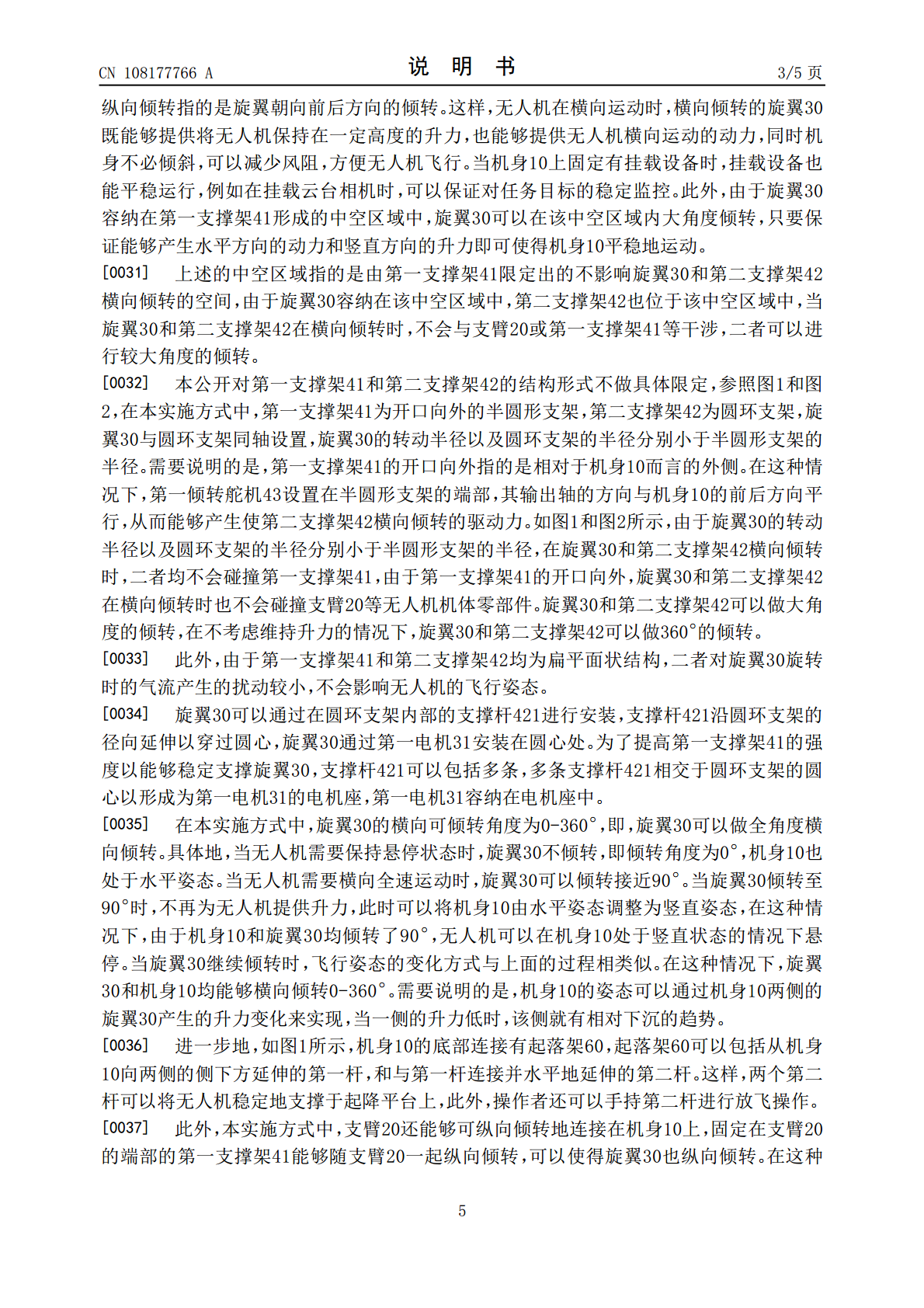
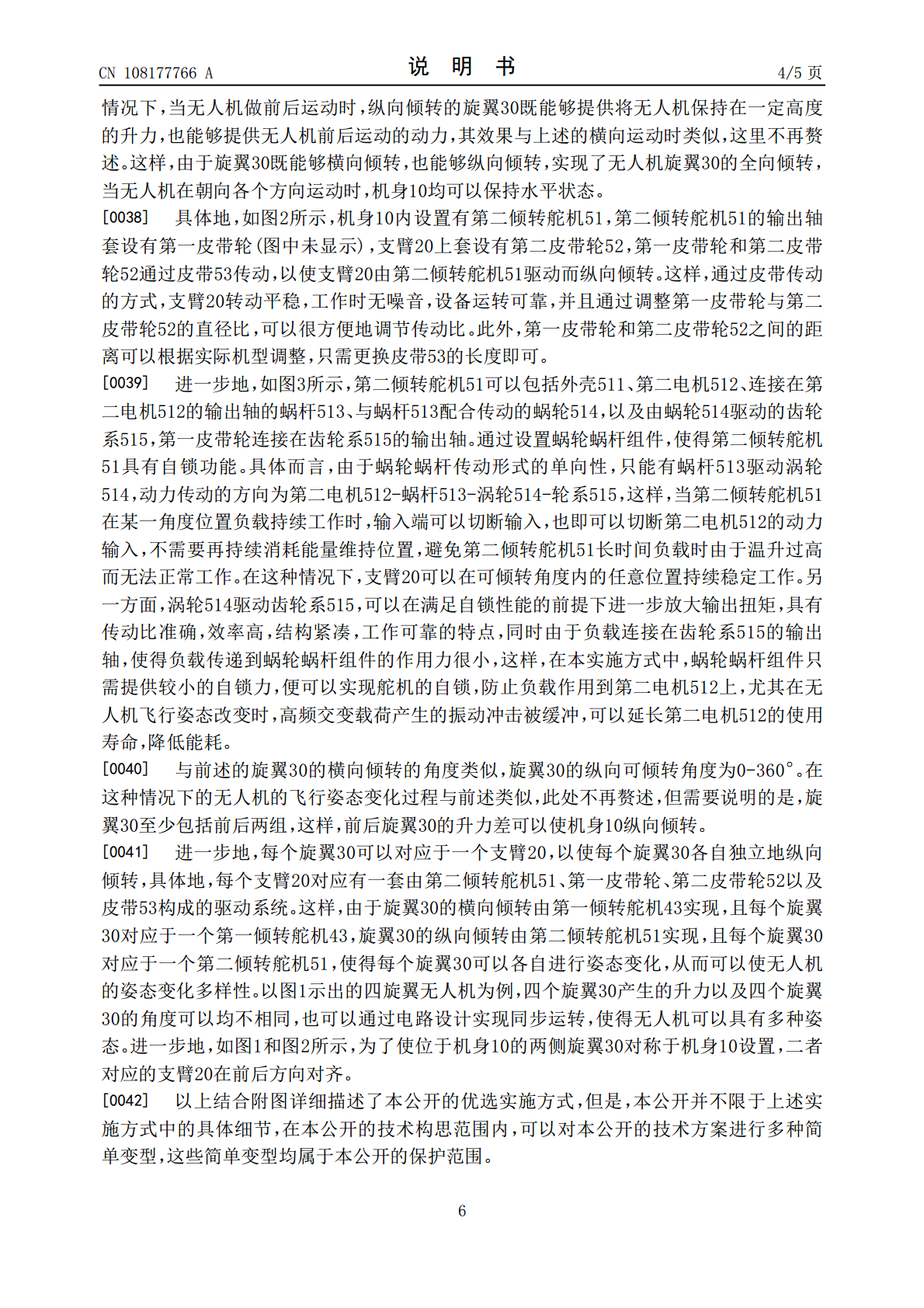
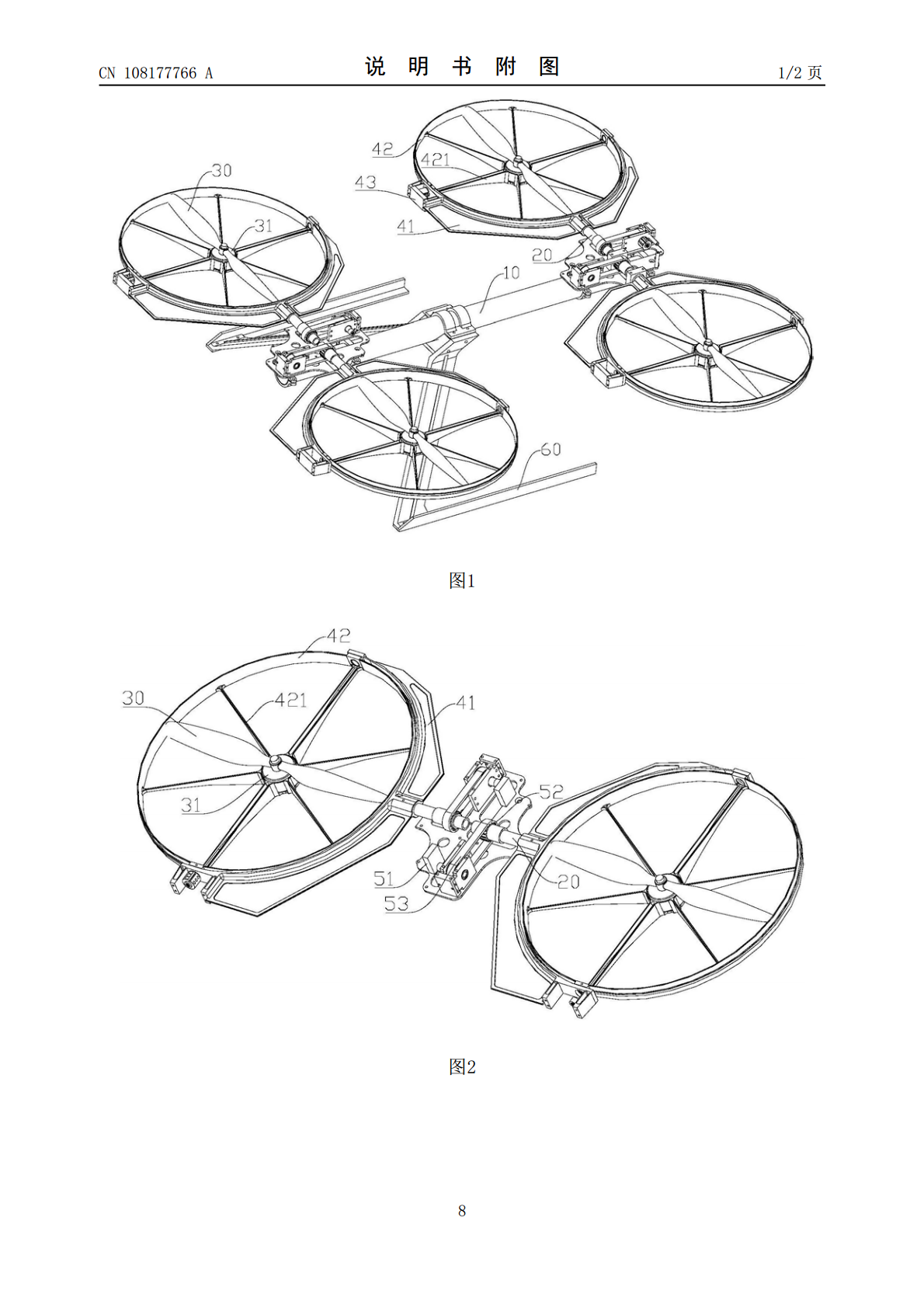
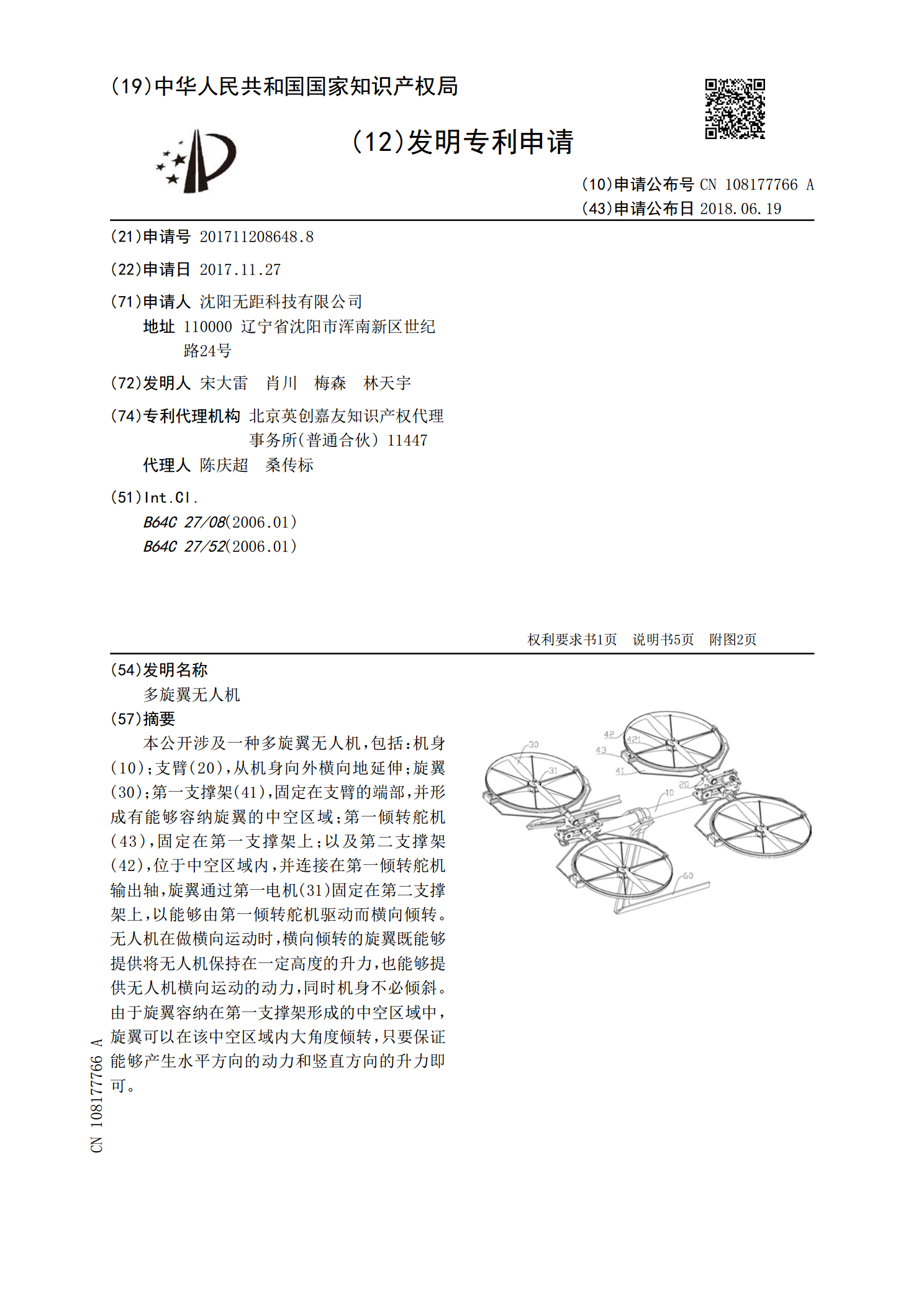
本公开涉及一种多旋翼无人机,包括:机身(10);支臂(20),从机身向外横向地延伸;旋翼(30);第一支撑架(41),固定在支臂的端部,并形成有能够容纳旋翼的中空区域;第一倾转舵机(43),固定在第一支撑架上;以及第二支撑架(42),位于中空区域内,并连接在第一倾转舵机输出轴,旋翼通过第一电机(31)固定在第二支撑架上,以能够由第一倾转舵机驱动而横向倾转。无人机在做横向运动时,横向倾转的旋翼既能够提供将无人机保持在一定高度的升力,也能够提供无人机横向运动的动力,同时机身不必倾斜。由于旋翼容纳在第一支撑架形
多旋翼无人机.pdf
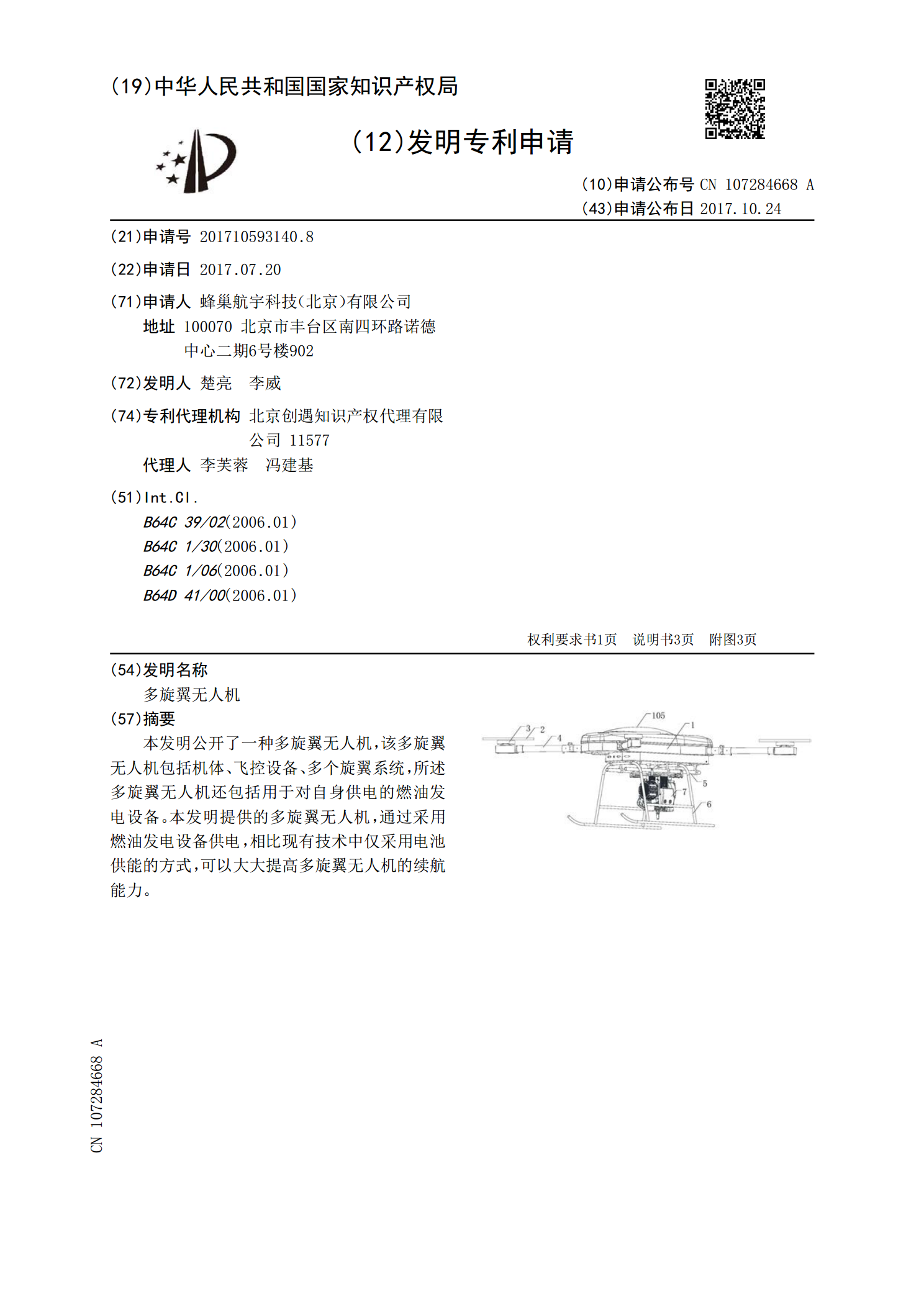
本发明公开了一种多旋翼无人机,该多旋翼无人机包括机体、飞控设备、多个旋翼系统,所述多旋翼无人机还包括用于对自身供电的燃油发电设备。本发明提供的多旋翼无人机,通过采用燃油发电设备供电,相比现有技术中仅采用电池供能的方式,可以大大提高多旋翼无人机的续航能力。

多旋翼无人机教案.doc
哈尔滨四通技工学校第三教学站延寿农民工综合培训学校多旋翼无人机操作教案二0一七春季生课程名称:多旋翼无人机操作基本授课教师:张海东课题第一章无人飞行器概述教学目的无人飞行器发展简史无人飞行器的优缺陷无人飞行器应用领域教学重点什么事无人机无人机的应用无人机将来的发展趋势教材分析无人机的概述重要性,协助学员更好的理解无人机。教学措施讲授法授课类型新课课时二学时课程内容组织教学课前提问导入新课教学内容:1、19,在莱特兄弟所获得的成功的鼓舞下,来自俄亥俄州的年轻军事工程师查尔斯?科特林建议使用没有人驾驶的飞行器

浅析多旋翼无人机.docx
浅析多旋翼无人机随着科技的不断发展,无人机已经成为了现代化社会中一种重要的飞行器具。其中,多旋翼无人机是无人机中最常见的两种类型之一(另一种是固定翼无人机)。本文将对多旋翼无人机进行深入探讨。一、多旋翼无人机的定义及分类多旋翼无人机是一种由多个叶片(通常为3-8个)环绕一个中心轴旋转的无人机。它们通常使用电机作为动力来源,可以通过改变自身叶片的旋转速度和方向来实现飞行。根据不同的轴线数量,多旋翼无人机可分为三种:三旋翼、四旋翼和六旋翼。其中,四旋翼是最常见的一种。此外,还有像八旋翼这样的多旋翼无人机,它们