
一种支持多旋翼无人机空中起降的平台装置.pdf

大渊****公主

1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种支持多旋翼无人机空中起降的平台装置.pdf
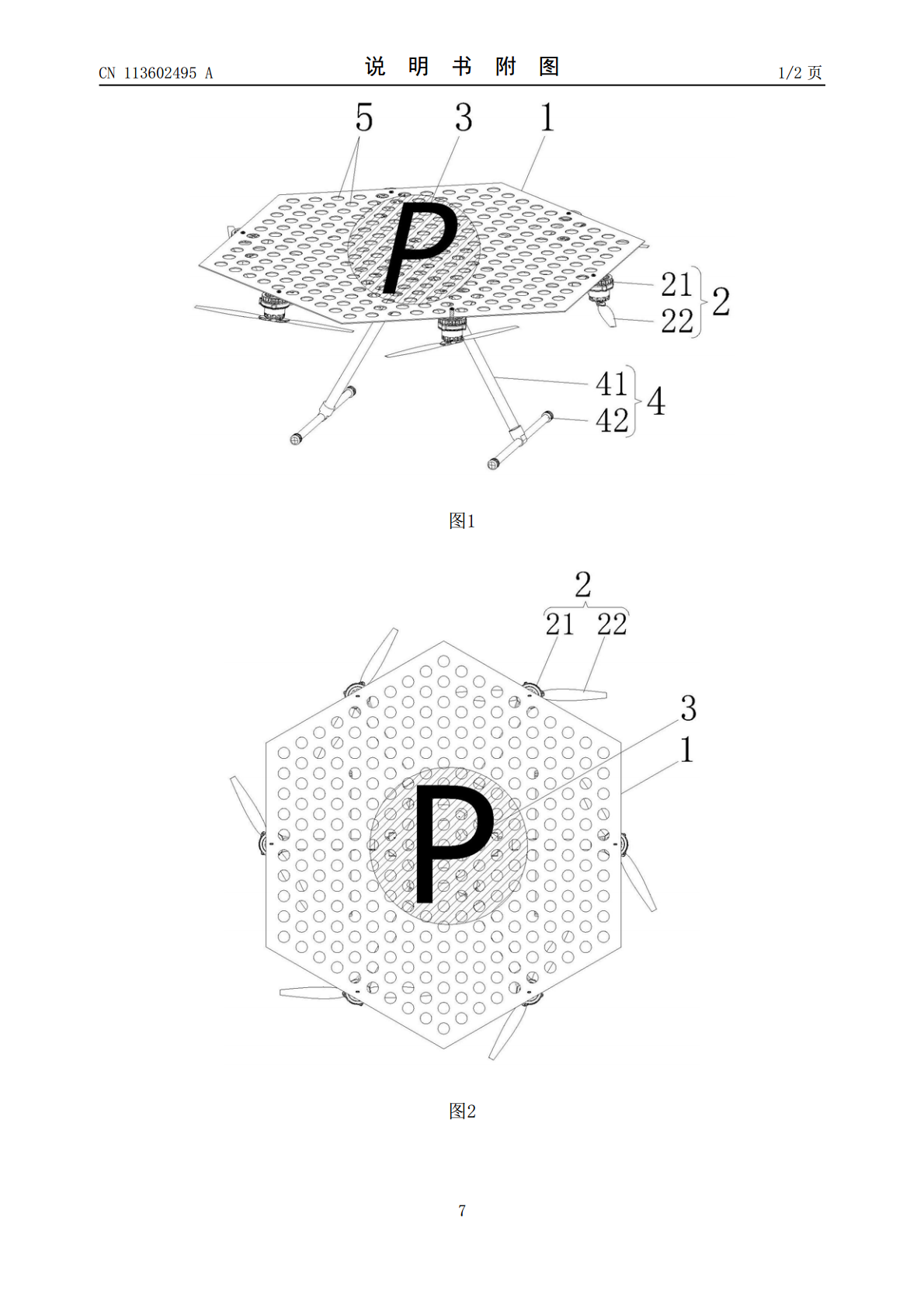
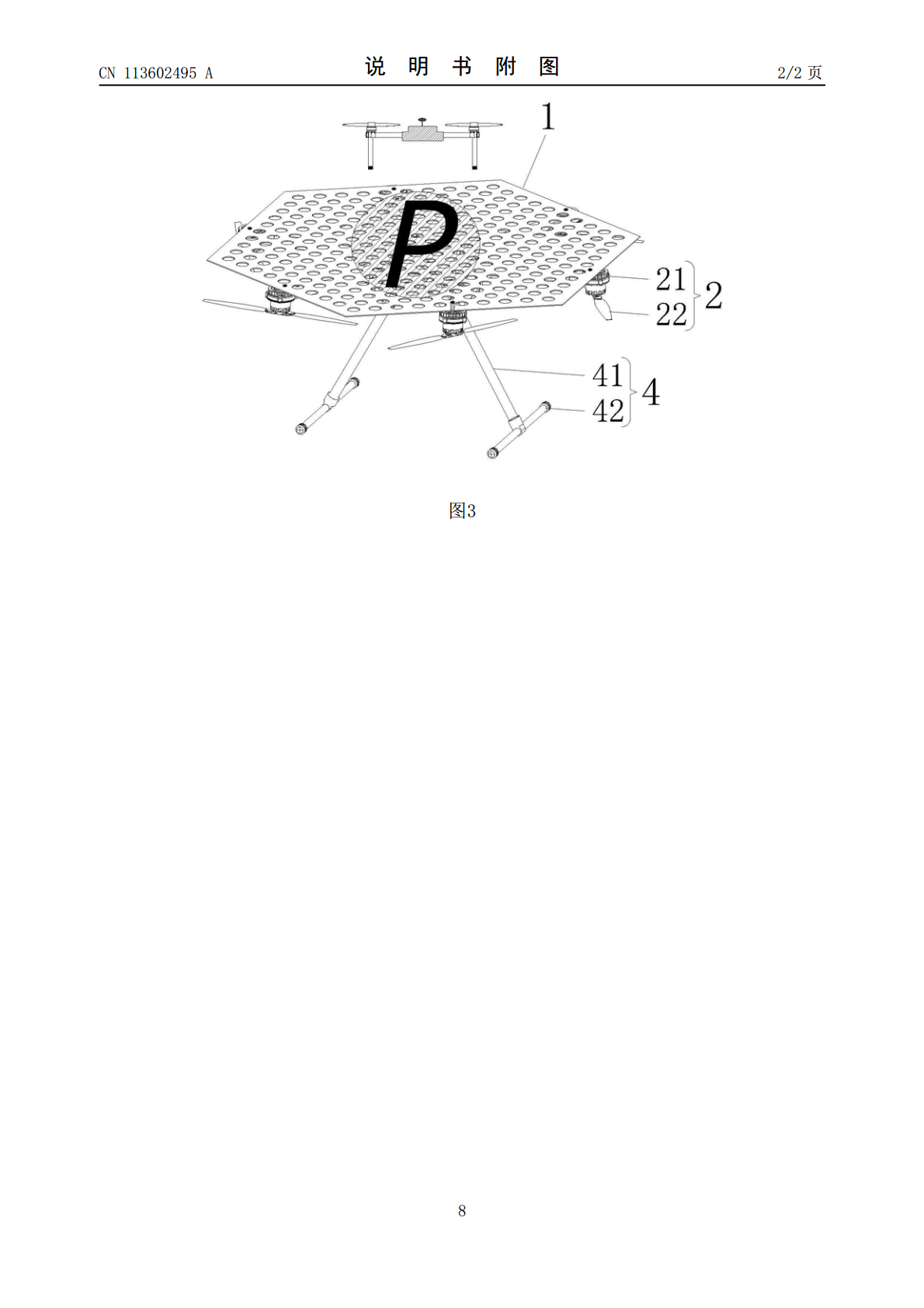
本发明公开了一种支持多旋翼无人机空中起降的平台装置,属于无人机领域,包括支撑板、用于提供升力的升力组件、用于供电和控制平台装置的飞行状态的电控组件以及支撑架;支撑板上设置有多个减重透气孔;升力组件有多个且均设置在支撑板的底面,多个升力组件围绕支撑板的底面中心呈对称或者周向均匀分布;电控组件安装在支撑板的底面,电控组件包括机壳以及位于机壳内的与升力组件电性连接的飞行控制系统以及与升力组件、飞行控制系统电性连接的电源系统;支撑架固定安装在支撑板的底面或者机壳的底面。本发明通过为多旋翼无人机提供起降场所,从而有
一种支持固定翼无人机空中起降方法及其装置.pdf
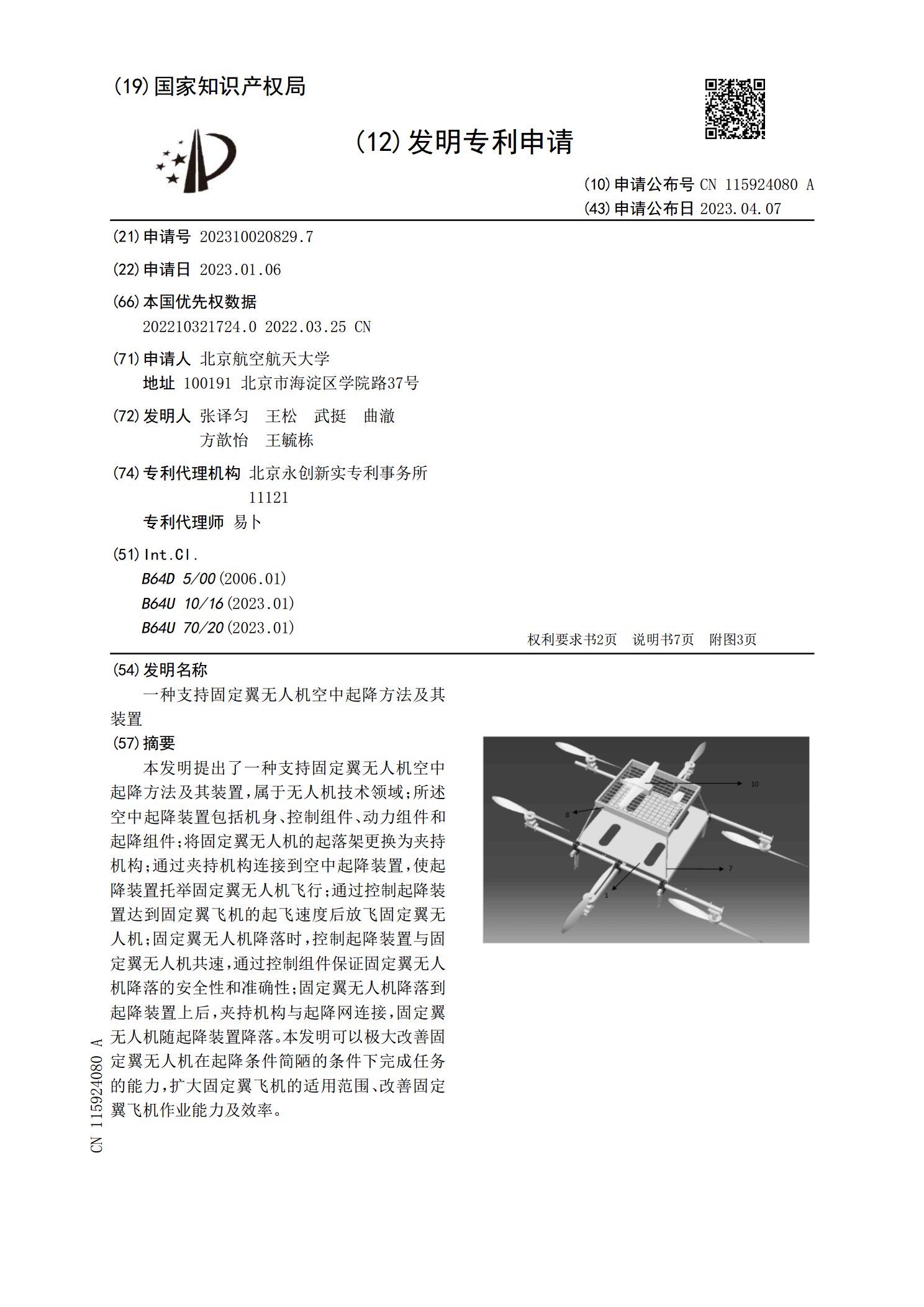
本发明提出了一种支持固定翼无人机空中起降方法及其装置,属于无人机技术领域;所述空中起降装置包括机身、控制组件、动力组件和起降组件;将固定翼无人机的起落架更换为夹持机构;通过夹持机构连接到空中起降装置,使起降装置托举固定翼无人机飞行;通过控制起降装置达到固定翼飞机的起飞速度后放飞固定翼无人机;固定翼无人机降落时,控制起降装置与固定翼无人机共速,通过控制组件保证固定翼无人机降落的安全性和准确性;固定翼无人机降落到起降装置上后,夹持机构与起降网连接,固定翼无人机随起降装置降落。本发明可以极大改善固定翼无人机在起
多旋翼无人机全地形自平衡起降平台.pdf
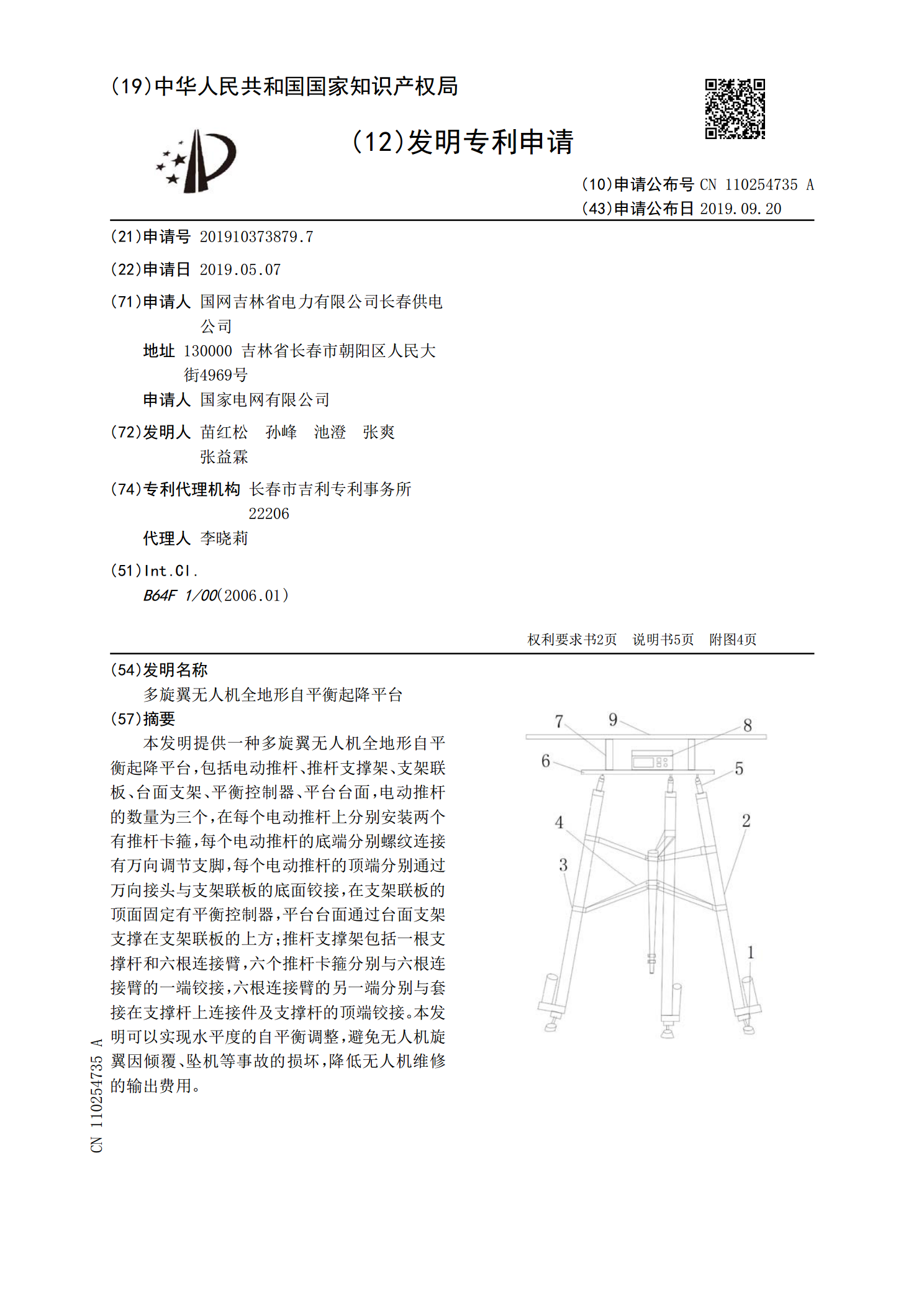
本发明提供一种多旋翼无人机全地形自平衡起降平台,包括电动推杆、推杆支撑架、支架联板、台面支架、平衡控制器、平台台面,电动推杆的数量为三个,在每个电动推杆上分别安装两个有推杆卡箍,每个电动推杆的底端分别螺纹连接有万向调节支脚,每个电动推杆的顶端分别通过万向接头与支架联板的底面铰接,在支架联板的顶面固定有平衡控制器,平台台面通过台面支架支撑在支架联板的上方;推杆支撑架包括一根支撑杆和六根连接臂,六个推杆卡箍分别与六根连接臂的一端铰接,六根连接臂的另一端分别与套接在支撑杆上连接件及支撑杆的顶端铰接。本发明可以实
一种基于多旋翼无人机平台的测风装置.pdf
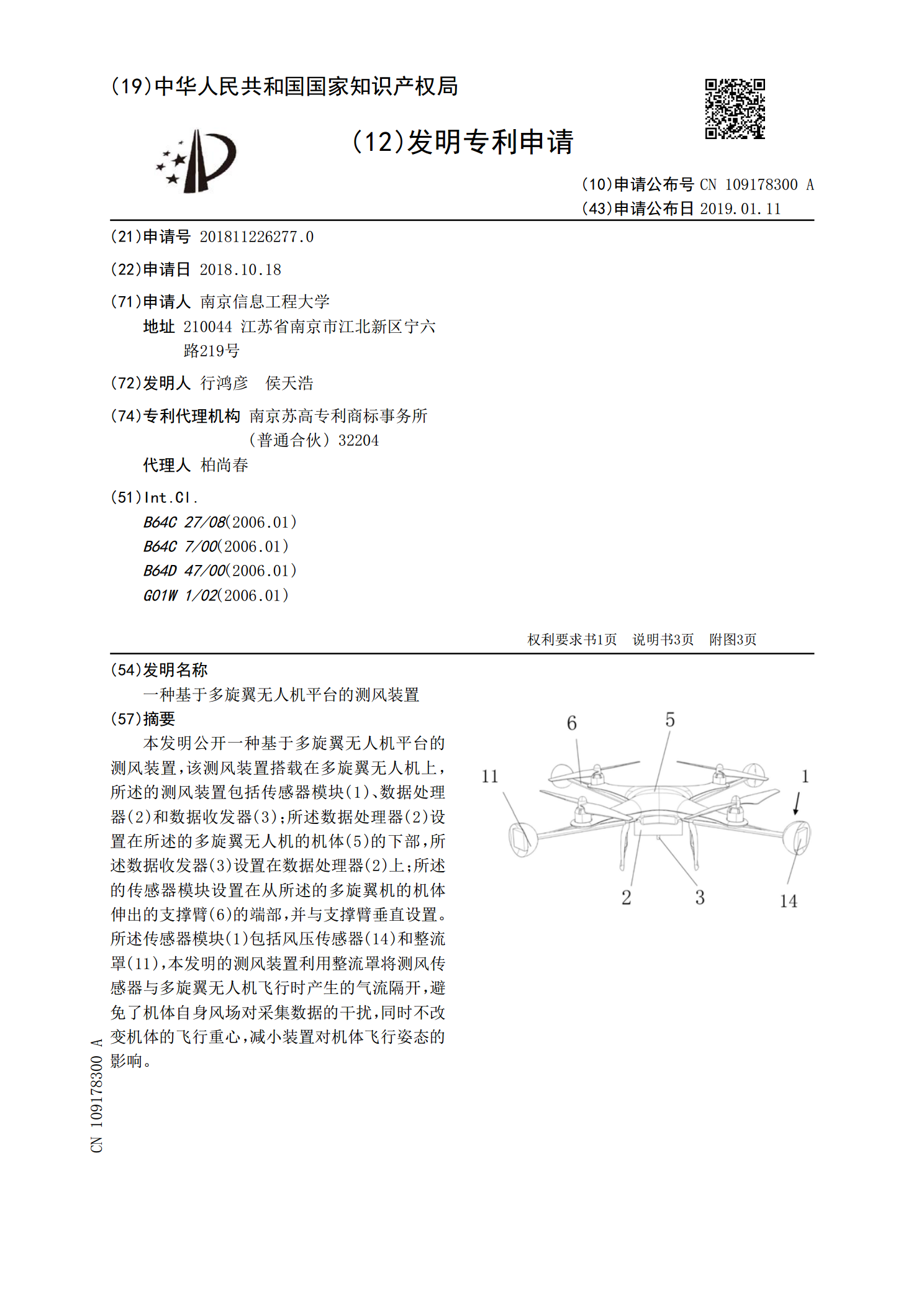
本发明公开一种基于多旋翼无人机平台的测风装置,该测风装置搭载在多旋翼无人机上,所述的测风装置包括传感器模块(1)、数据处理器(2)和数据收发器(3);所述数据处理器(2)设置在所述的多旋翼无人机的机体(5)的下部,所述数据收发器(3)设置在数据处理器(2)上;所述的传感器模块设置在从所述的多旋翼机的机体伸出的支撑臂(6)的端部,并与支撑臂垂直设置。所述传感器模块(1)包括风压传感器(14)和整流罩(11),本发明的测风装置利用整流罩将测风传感器与多旋翼无人机飞行时产生的气流隔开,避免了机体自身风场对采集数
具有均热板的多旋翼空中无人机.pdf
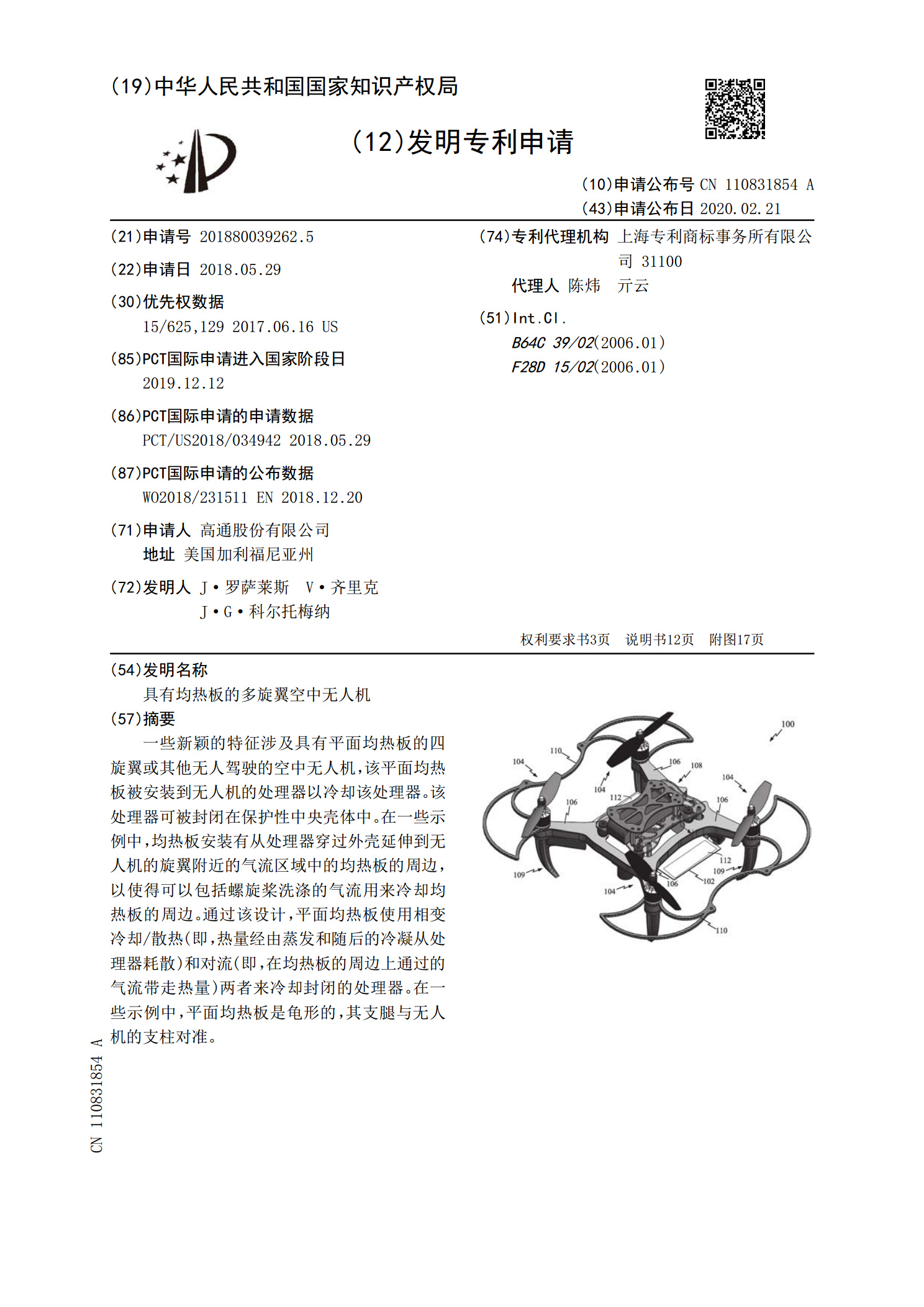
一些新颖的特征涉及具有平面均热板的四旋翼或其他无人驾驶的空中无人机,该平面均热板被安装到无人机的处理器以冷却该处理器。该处理器可被封闭在保护性中央壳体中。在一些示例中,均热板安装有从处理器穿过外壳延伸到无人机的旋翼附近的气流区域中的均热板的周边,以使得可以包括螺旋桨洗涤的气流用来冷却均热板的周边。通过该设计,平面均热板使用相变冷却/散热(即,热量经由蒸发和随后的冷凝从处理器耗散)和对流(即,在均热板的周边上通过的气流带走热量)两者来冷却封闭的处理器。在一些示例中,平面均热板是龟形的,其支腿与无人机的支柱对