
一种智能轮椅的控制方法及装置.pdf

是你****平呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轮椅的控制方法、装置及智能轮椅.pdf
本申请涉及一种轮椅的控制方法、装置、电子设备及存储介质,该方法包括:基于接收的雷达回波信号获取点云数据;对所述点云数据进行分析得到预设类型的目标物;对所述目标物进行跟踪获取目标物的状态信息;根据所述状态信息控制所述轮椅执行避障操作。该技术方案通过对雷达的回波信号进行处理得到预设范围内的点云信息,对点云信息分类获得预设类型的目标物,进而对轮椅进行实时避障;通过对轮椅本身的定位,能够绘制轮椅的行驶轨迹,基于此便于实时监测障碍物的信息,防止使用者出现与目标物碰撞或摩擦现象的发生,另外还可以通过对周围环境检测实现

一种智能轮椅的控制方法及装置.pdf
本申请提供了一种智能轮椅的控制方法及装置,应用于智能轮椅,智能轮椅包括支撑结构、升降结构和控制结构,支撑结构和控制结构电连接;支撑结构包括电动推杆、支撑板、支撑杆、杠杆;控制方法包括:控制结构接收移动终端发送的第一动作指令;根据第一动作指令生成第一控制指令,并将第一控制指令发送给电动推杆;以使电动推杆在第一控制指令指示电动推杆缩短时,根据第一控制指令进行缩短操作,带动杠杆、支撑板以支撑杆为支点进行旋转,使得支撑板远离电动推杆的一侧上升之后,支撑板辅助用户使其臀部离开乘坐位置。本申请提供的智能轮椅控制方法,

一种智能轮椅的主动安全控制方法及装置.pdf
本发明公开了一种智能轮椅的主动安全控制方法,包括:S1、通过四个压力传感器分别实时采集轮椅的底盘部件的四个角端位置的压力数据;S2、通过控制器对四个压力传感器采集的压力数据进行对比分析,计算座椅部件是否位于重心安全位置;如果计算结果是位于重心安全位置则执行步骤S3,否则执行步骤S4;S3、控制器控制座椅下方的横向移动部件和纵向移动部件动作,使其位于重心安全位置;S4、控制器控制座椅下方的横向移动部件和纵向移动部件动作停止动作;S5、完成一次重心位置调整工作或不调整的工作后,数据清零,重新执行上述步骤S1至
智能轮椅及智能轮椅的控制方法.pdf
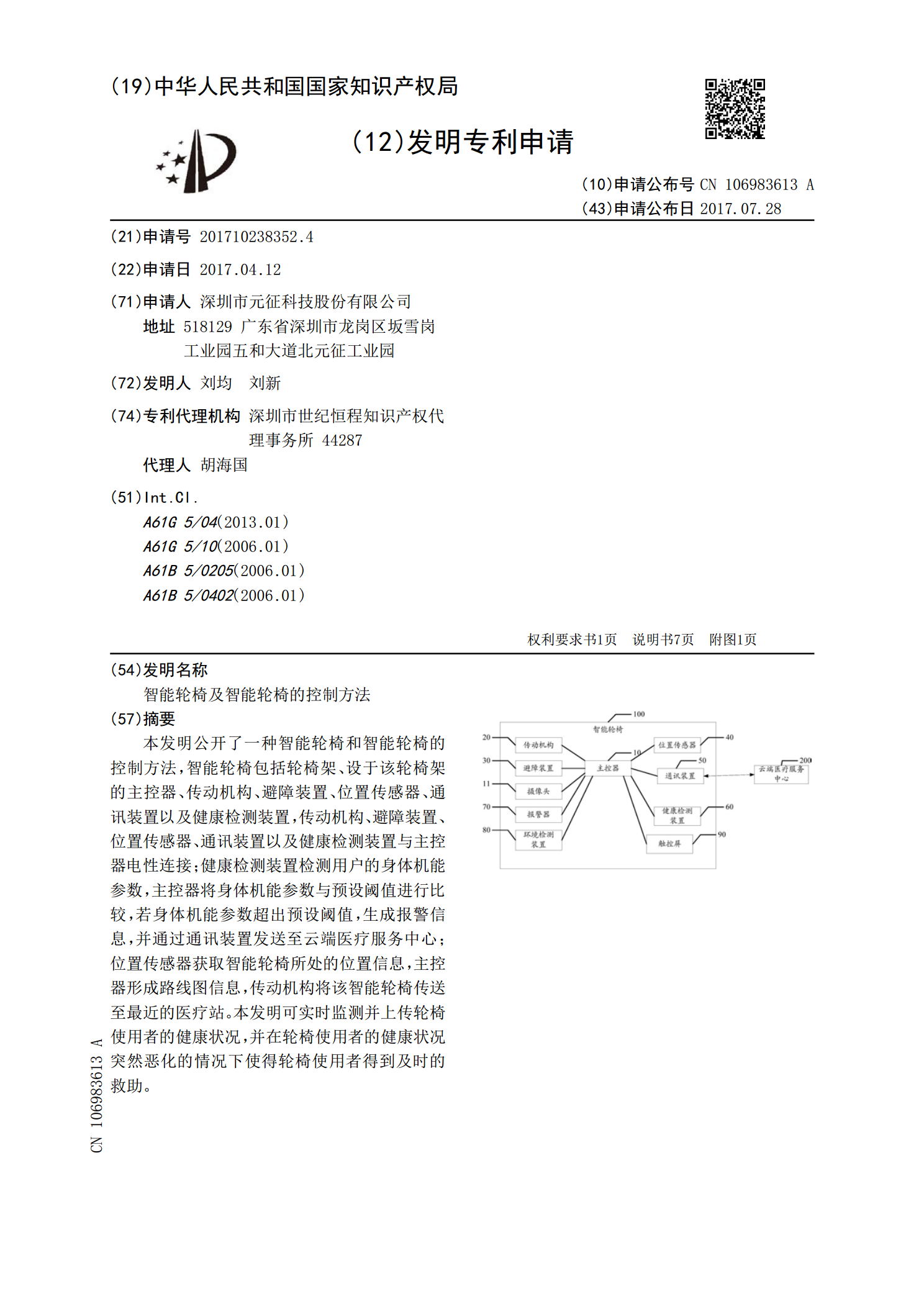
本发明公开了一种智能轮椅和智能轮椅的控制方法,智能轮椅包括轮椅架、设于该轮椅架的主控器、传动机构、避障装置、位置传感器、通讯装置以及健康检测装置,传动机构、避障装置、位置传感器、通讯装置以及健康检测装置与主控器电性连接;健康检测装置检测用户的身体机能参数,主控器将身体机能参数与预设阈值进行比较,若身体机能参数超出预设阈值,生成报警信息,并通过通讯装置发送至云端医疗服务中心;位置传感器获取智能轮椅所处的位置信息,主控器形成路线图信息,传动机构将该智能轮椅传送至最近的医疗站。本发明可实时监测并上传轮椅使用者的
一种智能轮椅及其控制方法.pdf
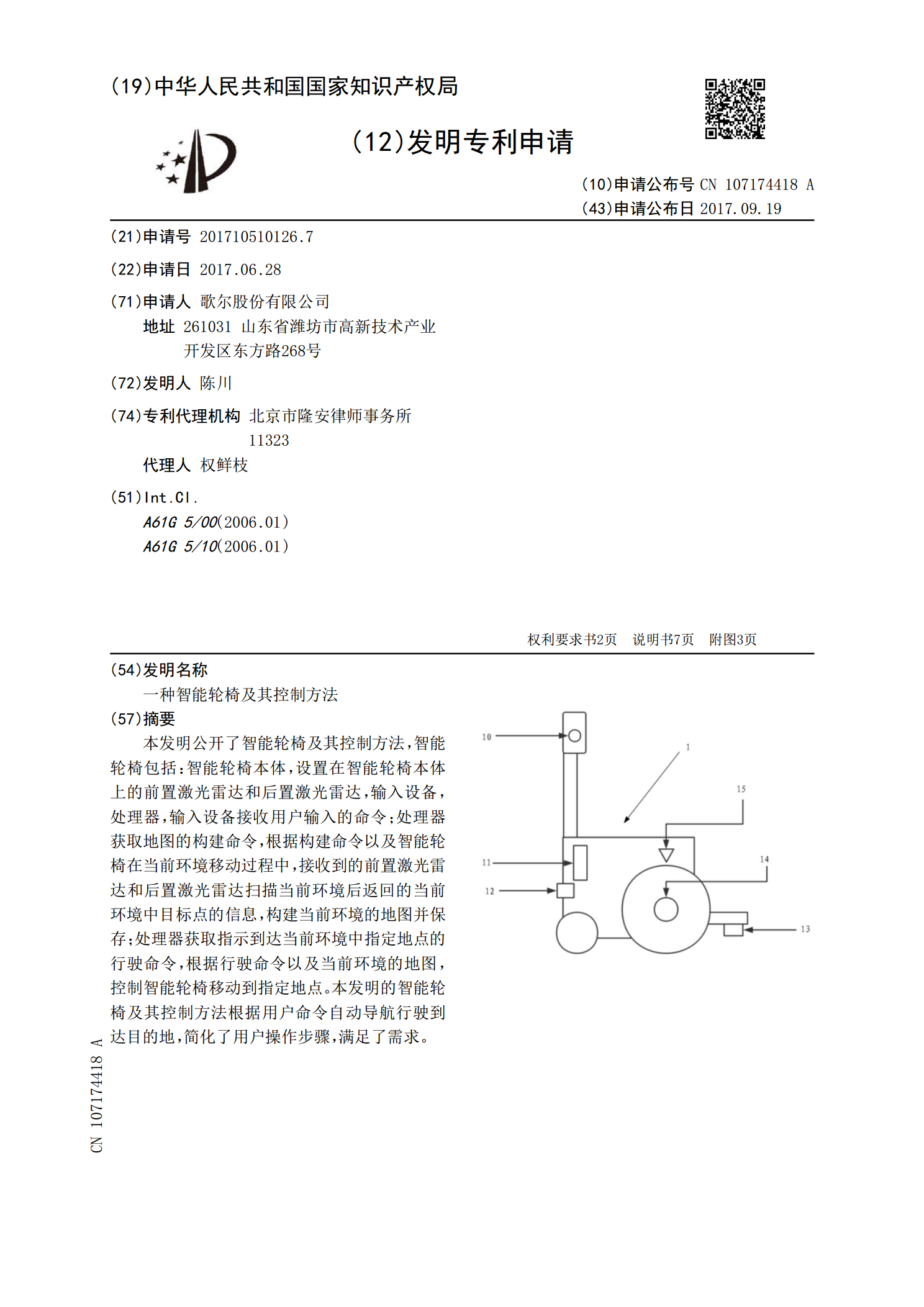
本发明公开了智能轮椅及其控制方法,智能轮椅包括:智能轮椅本体,设置在智能轮椅本体上的前置激光雷达和后置激光雷达,输入设备,处理器,输入设备接收用户输入的命令;处理器获取地图的构建命令,根据构建命令以及智能轮椅在当前环境移动过程中,接收到的前置激光雷达和后置激光雷达扫描当前环境后返回的当前环境中目标点的信息,构建当前环境的地图并保存;处理器获取指示到达当前环境中指定地点的行驶命令,根据行驶命令以及当前环境的地图,控制智能轮椅移动到指定地点。本发明的智能轮椅及其控制方法根据用户命令自动导航行驶到达目的地,简化