
晶圆位置检测装置、晶圆位置检测方法.pdf

慧娇****文章


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

晶圆位置检测装置、晶圆位置检测方法.pdf
本申请公开了一种晶圆位置检测装置及晶圆位置检测方法,涉及半导体制造技术领域,晶圆检测装置包括支撑杆、U型检测头、至少两组光感应器、检测轨道和驱动马达;支撑杆包括上支撑杆和下支撑杆,上支撑杆与下支撑杆通过中间驱动马达连接,上支撑杆的顶部连接U型检测头的底部,下支撑杆的底部固定在检测轨道内;中间驱动马达令上支撑杆处于第一位置或第二位置;U型检测头的两个侧边上设置有至少两组光感应器;检测轨道上的下端驱动马达带动晶圆检测装置沿检测轨道运动;解决了现有的晶圆清洗机台中,真空吸盘固定腔室无法检测晶圆位置的问题;达到了
晶圆盒中晶圆位置异常的处理方法和装置.pdf
本申请提供一种晶圆盒中晶圆位置异常的处理方法与装置,晶圆盒的内侧壁包括从上至下依次设置的多组晶圆承载部件,各组晶圆承载部件包括结构相同且对称设置于晶圆盒中相对的两个内侧壁上的晶圆承载子部件,各晶圆承载子部件的水平以及垂直承载部的外边沿中心位置分别设置有用于检测自身形变的球形传感器,所述方法包括:基于预设扫描顺序依次获取各晶圆承载部件中的球形传感器反馈的信号子集,并基于信号子集确定晶圆位置异常的目标晶圆承载部件及对应的目标晶圆,直至遍历全部晶圆承载部件,若存在目标晶圆,基于目标晶圆信息更新初始工艺流程,并基
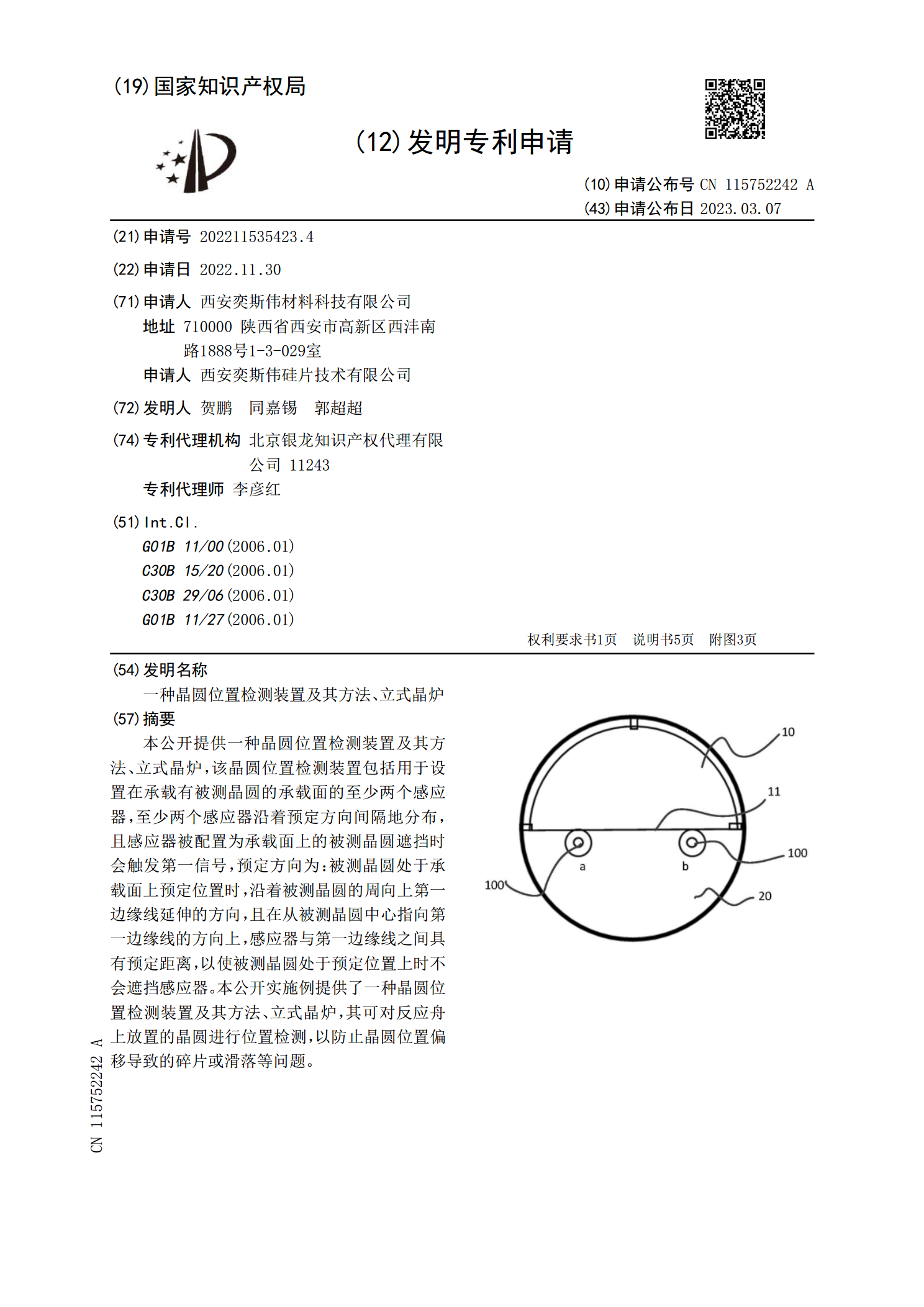
一种晶圆位置检测装置及其方法、立式晶炉.pdf
本公开提供一种晶圆位置检测装置及其方法、立式晶炉,该晶圆位置检测装置包括用于设置在承载有被测晶圆的承载面的至少两个感应器,至少两个感应器沿着预定方向间隔地分布,且感应器被配置为承载面上的被测晶圆遮挡时会触发第一信号,预定方向为:被测晶圆处于承载面上预定位置时,沿着被测晶圆的周向上第一边缘线延伸的方向,且在从被测晶圆中心指向第一边缘线的方向上,感应器与第一边缘线之间具有预定距离,以使被测晶圆处于预定位置上时不会遮挡感应器。本公开实施例提供了一种晶圆位置检测装置及其方法、立式晶炉,其可对反应舟上放置的晶圆进行
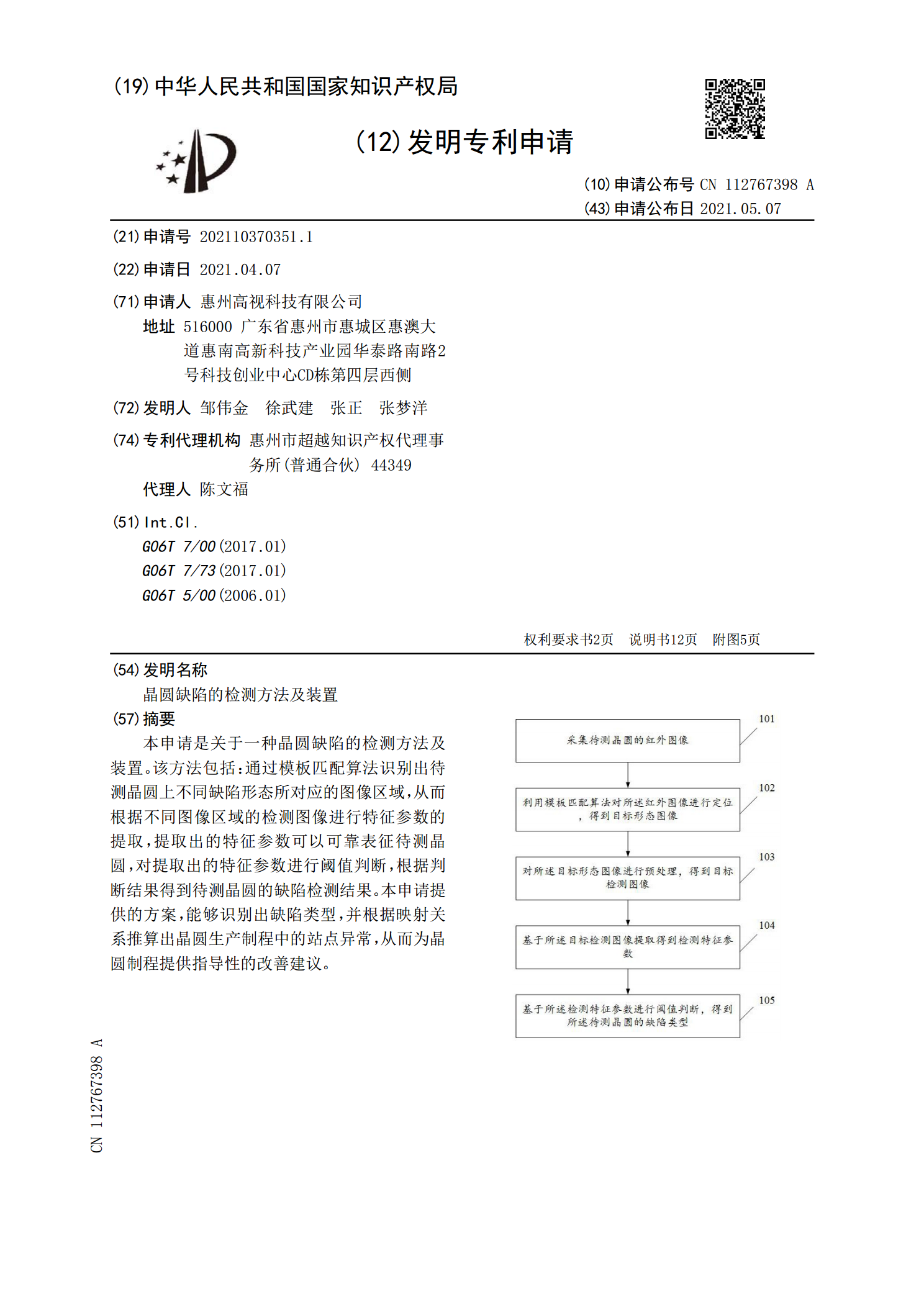
晶圆缺陷的检测方法及装置.pdf
本申请是关于一种晶圆缺陷的检测方法及装置。该方法包括:通过模板匹配算法识别出待测晶圆上不同缺陷形态所对应的图像区域,从而根据不同图像区域的检测图像进行特征参数的提取,提取出的特征参数可以可靠表征待测晶圆,对提取出的特征参数进行阈值判断,根据判断结果得到待测晶圆的缺陷检测结果。本申请提供的方案,能够识别出缺陷类型,并根据映射关系推算出晶圆生产制程中的站点异常,从而为晶圆制程提供指导性的改善建议。
晶圆缺陷的检测方法及装置.pdf
本申请是关于一种晶圆缺陷的检测方法及装置。该方法包括:通过模板匹配算法识别出待测晶圆上不同缺陷形态所对应的图像区域,从而根据不同图像区域的检测图像进行特征参数的提取,提取出的特征参数可以可靠表征待测晶圆,对提取出的特征参数进行阈值判断,根据判断结果得到待测晶圆的缺陷检测结果。本申请提供的方案,能够识别出缺陷类型,并根据映射关系推算出晶圆生产制程中的站点异常,从而为晶圆制程提供指导性的改善建议。