
一种智能机器人的防撞防跌装置.pdf

St****12

1/6

2/6
3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能机器人的防撞防跌装置.pdf
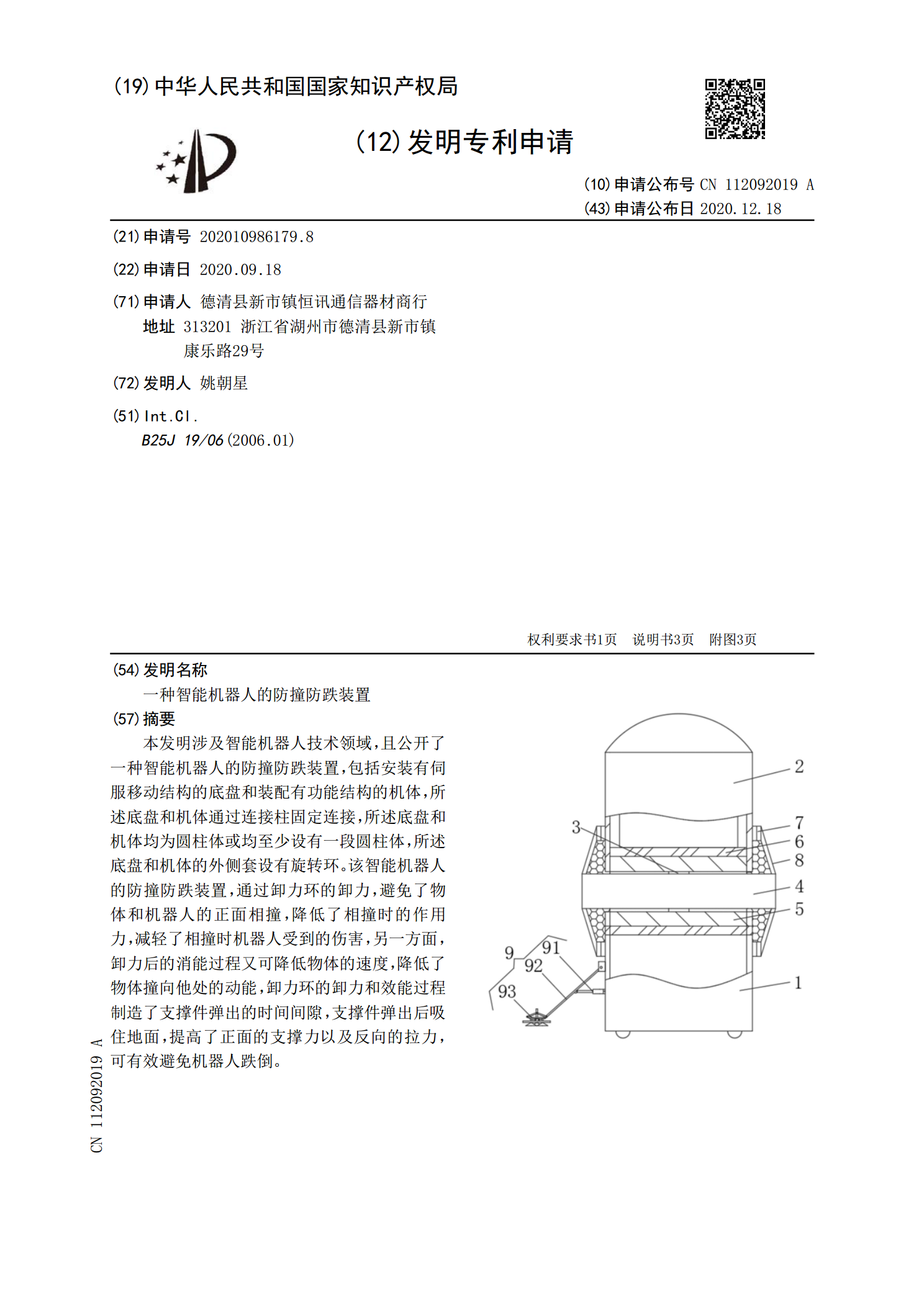
本发明涉及智能机器人技术领域,且公开了一种智能机器人的防撞防跌装置,包括安装有伺服移动结构的底盘和装配有功能结构的机体,所述底盘和机体通过连接柱固定连接,所述底盘和机体均为圆柱体或均至少设有一段圆柱体,所述底盘和机体的外侧套设有旋转环。该智能机器人的防撞防跌装置,通过卸力环的卸力,避免了物体和机器人的正面相撞,降低了相撞时的作用力,减轻了相撞时机器人受到的伤害,另一方面,卸力后的消能过程又可降低物体的速度,降低了物体撞向他处的动能,卸力环的卸力和效能过程制造了支撑件弹出的时间间隙,支撑件弹出后吸住地面,提
一种智能机器人的防撞防跌装置.pdf
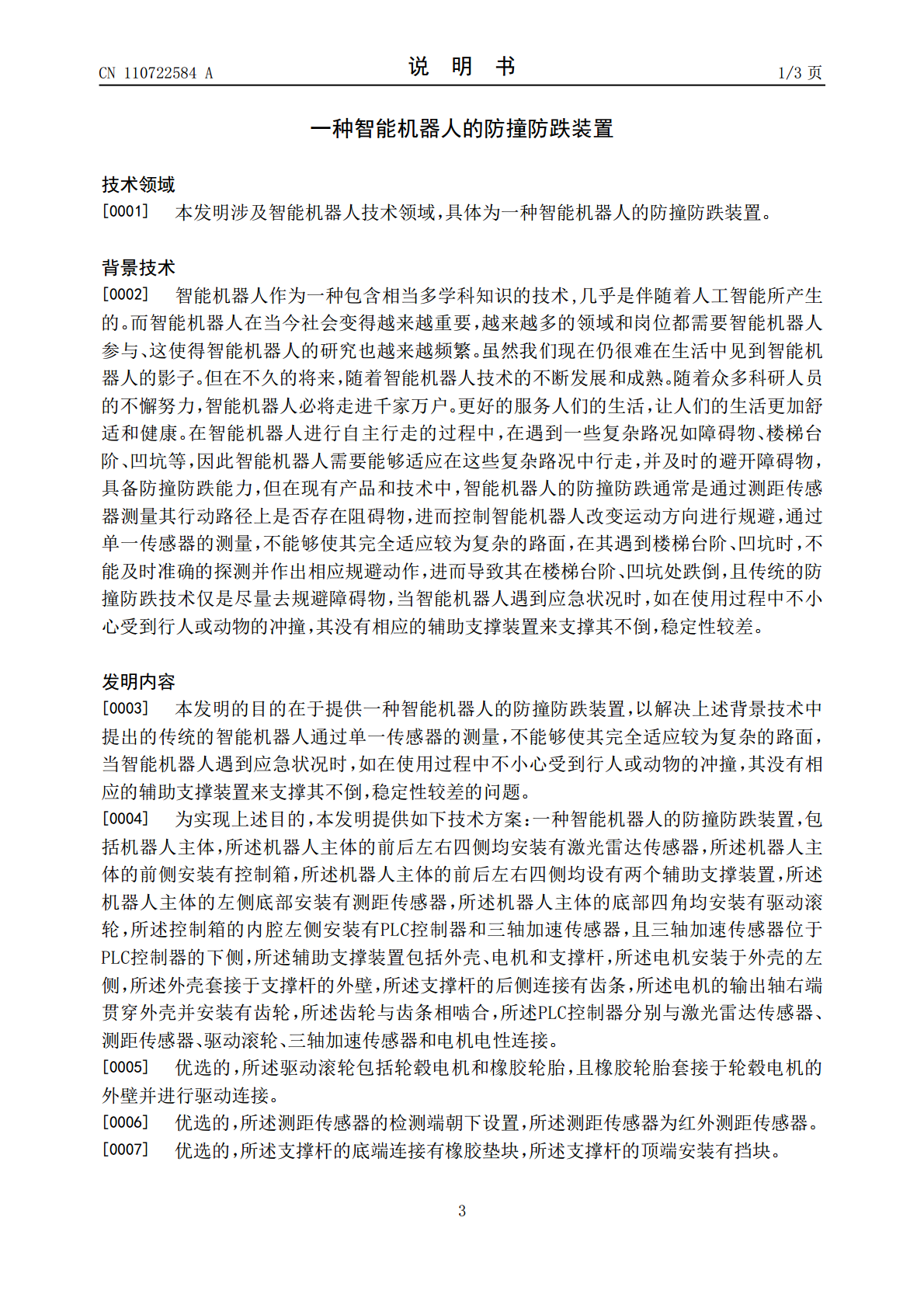
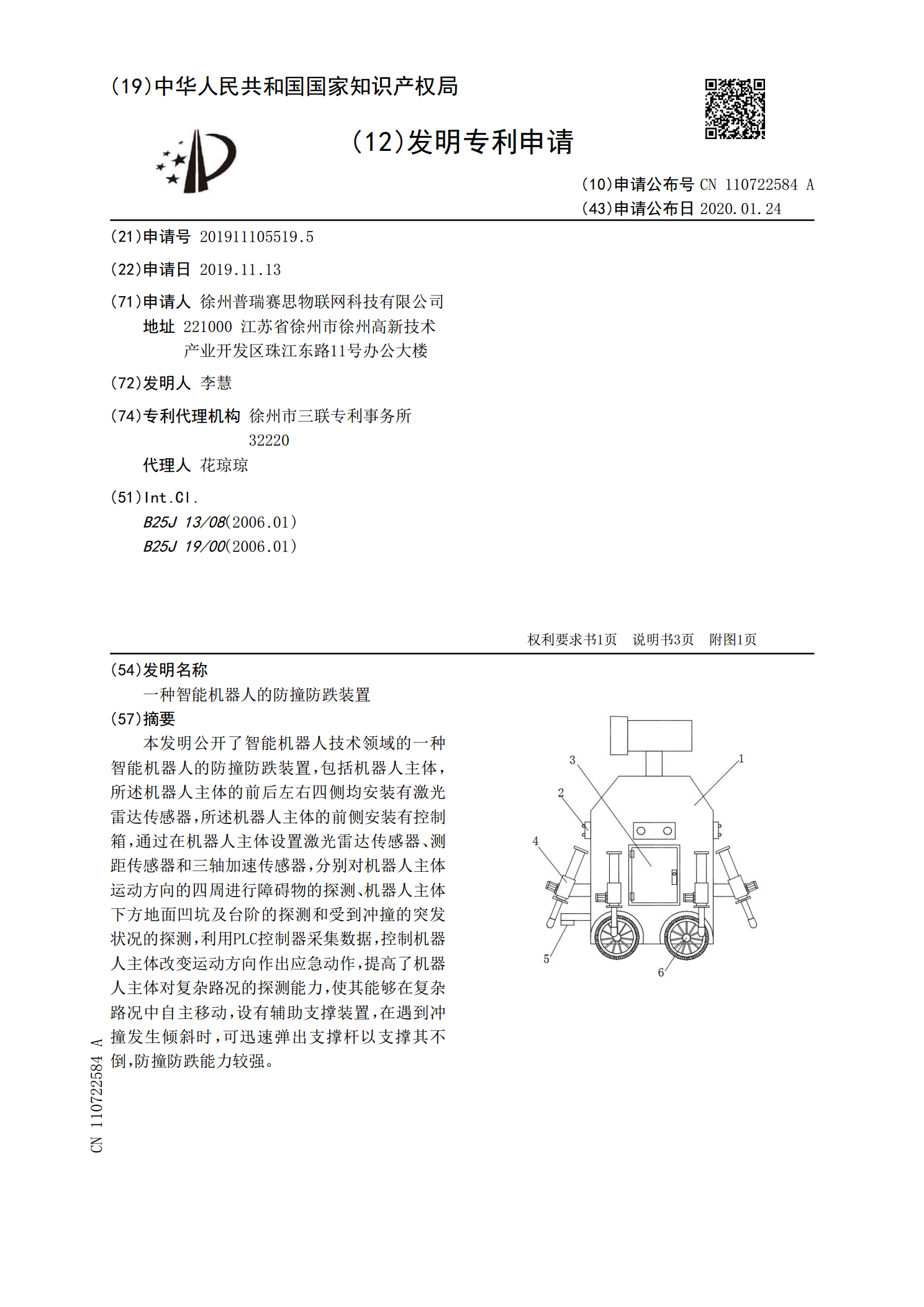
本发明公开了智能机器人技术领域的一种智能机器人的防撞防跌装置,包括机器人主体,所述机器人主体的前后左右四侧均安装有激光雷达传感器,所述机器人主体的前侧安装有控制箱,通过在机器人主体设置激光雷达传感器、测距传感器和三轴加速传感器,分别对机器人主体运动方向的四周进行障碍物的探测、机器人主体下方地面凹坑及台阶的探测和受到冲撞的突发状况的探测,利用PLC控制器采集数据,控制机器人主体改变运动方向作出应急动作,提高了机器人主体对复杂路况的探测能力,使其能够在复杂路况中自主移动,设有辅助支撑装置,在遇到冲撞发生倾斜时
一种用于智能机器人的防撞装置.pdf
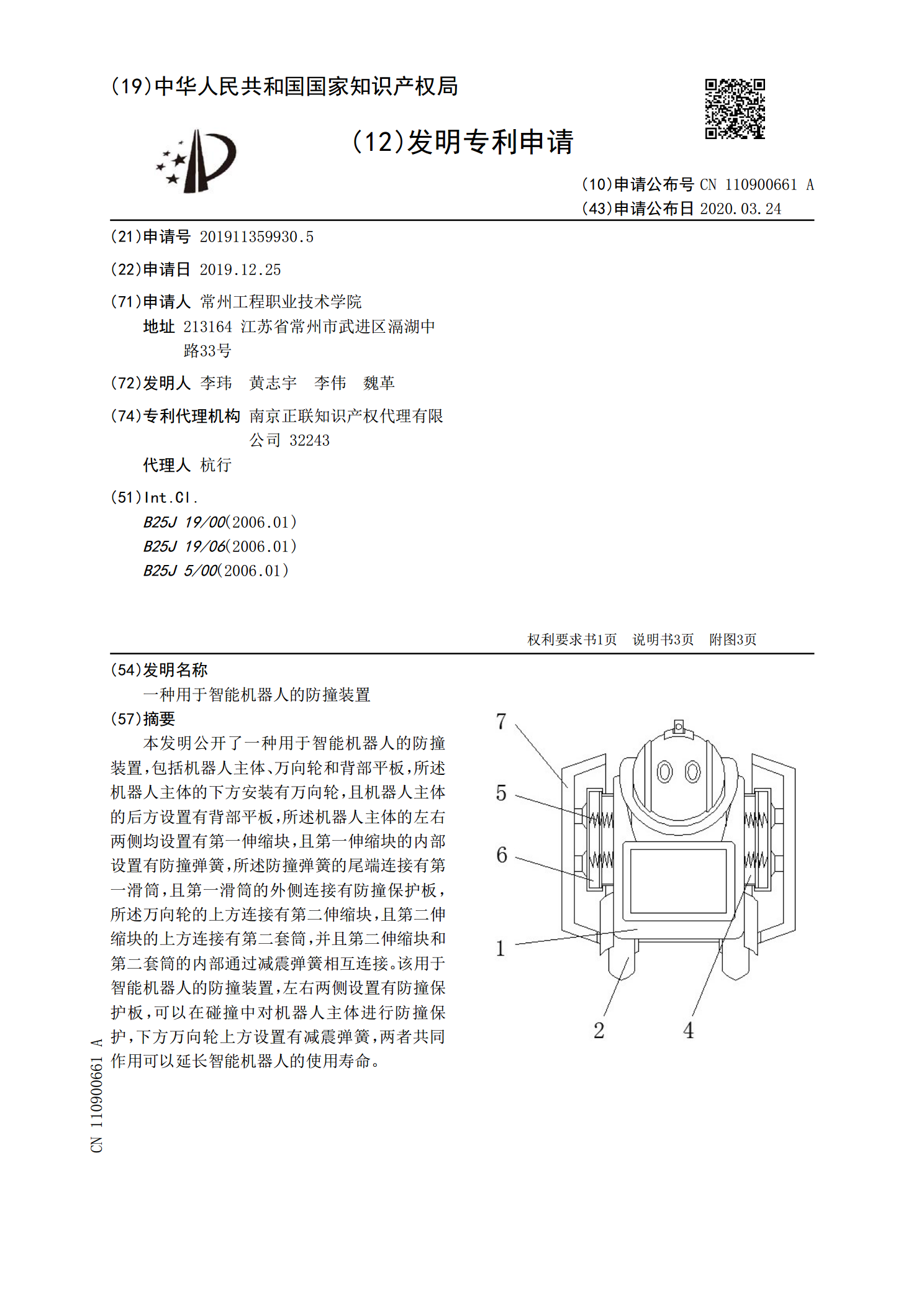
本发明公开了一种用于智能机器人的防撞装置,包括机器人主体、万向轮和背部平板,所述机器人主体的下方安装有万向轮,且机器人主体的后方设置有背部平板,所述机器人主体的左右两侧均设置有第一伸缩块,且第一伸缩块的内部设置有防撞弹簧,所述防撞弹簧的尾端连接有第一滑筒,且第一滑筒的外侧连接有防撞保护板,所述万向轮的上方连接有第二伸缩块,且第二伸缩块的上方连接有第二套筒,并且第二伸缩块和第二套筒的内部通过减震弹簧相互连接。该用于智能机器人的防撞装置,左右两侧设置有防撞保护板,可以在碰撞中对机器人主体进行防撞保护,下方万向
一种防撞型智能机器人.pdf
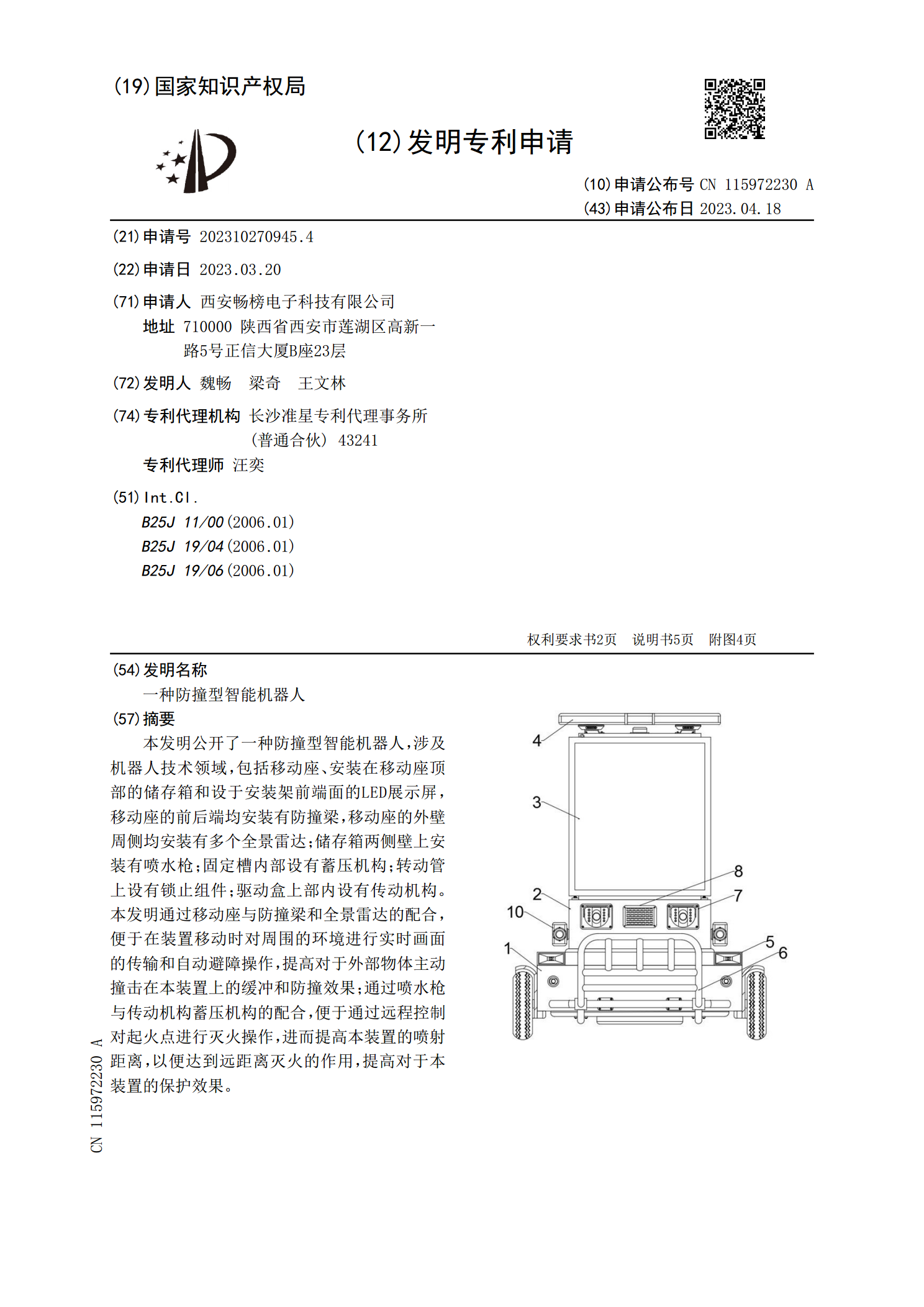
本发明公开了一种防撞型智能机器人,涉及机器人技术领域,包括移动座、安装在移动座顶部的储存箱和设于安装架前端面的LED展示屏,移动座的前后端均安装有防撞梁,移动座的外壁周侧均安装有多个全景雷达;储存箱两侧壁上安装有喷水枪;固定槽内部设有蓄压机构;转动管上设有锁止组件;驱动盒上部内设有传动机构。本发明通过移动座与防撞梁和全景雷达的配合,便于在装置移动时对周围的环境进行实时画面的传输和自动避障操作,提高对于外部物体主动撞击在本装置上的缓冲和防撞效果;通过喷水枪与传动机构蓄压机构的配合,便于通过远程控制对起火点进
一种机器人防撞装置.pdf
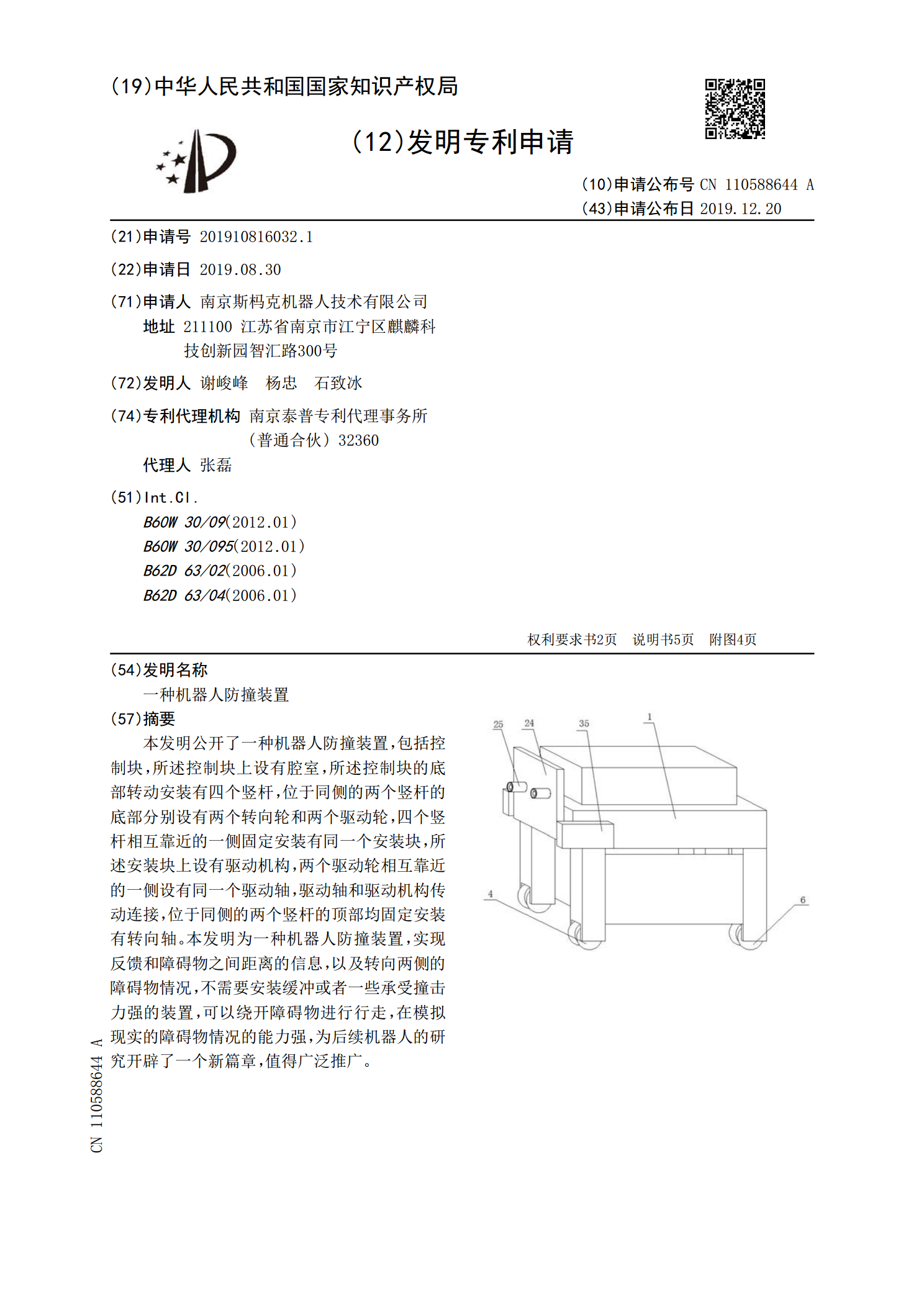
本发明公开了一种机器人防撞装置,包括控制块,所述控制块上设有腔室,所述控制块的底部转动安装有四个竖杆,位于同侧的两个竖杆的底部分别设有两个转向轮和两个驱动轮,四个竖杆相互靠近的一侧固定安装有同一个安装块,所述安装块上设有驱动机构,两个驱动轮相互靠近的一侧设有同一个驱动轴,驱动轴和驱动机构传动连接,位于同侧的两个竖杆的顶部均固定安装有转向轴。本发明为一种机器人防撞装置,实现反馈和障碍物之间距离的信息,以及转向两侧的障碍物情况,不需要安装缓冲或者一些承受撞击力强的装置,可以绕开障碍物进行行走,在模拟现实的障碍