
一种防撞型智能机器人.pdf

运升****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种防撞型智能机器人.pdf
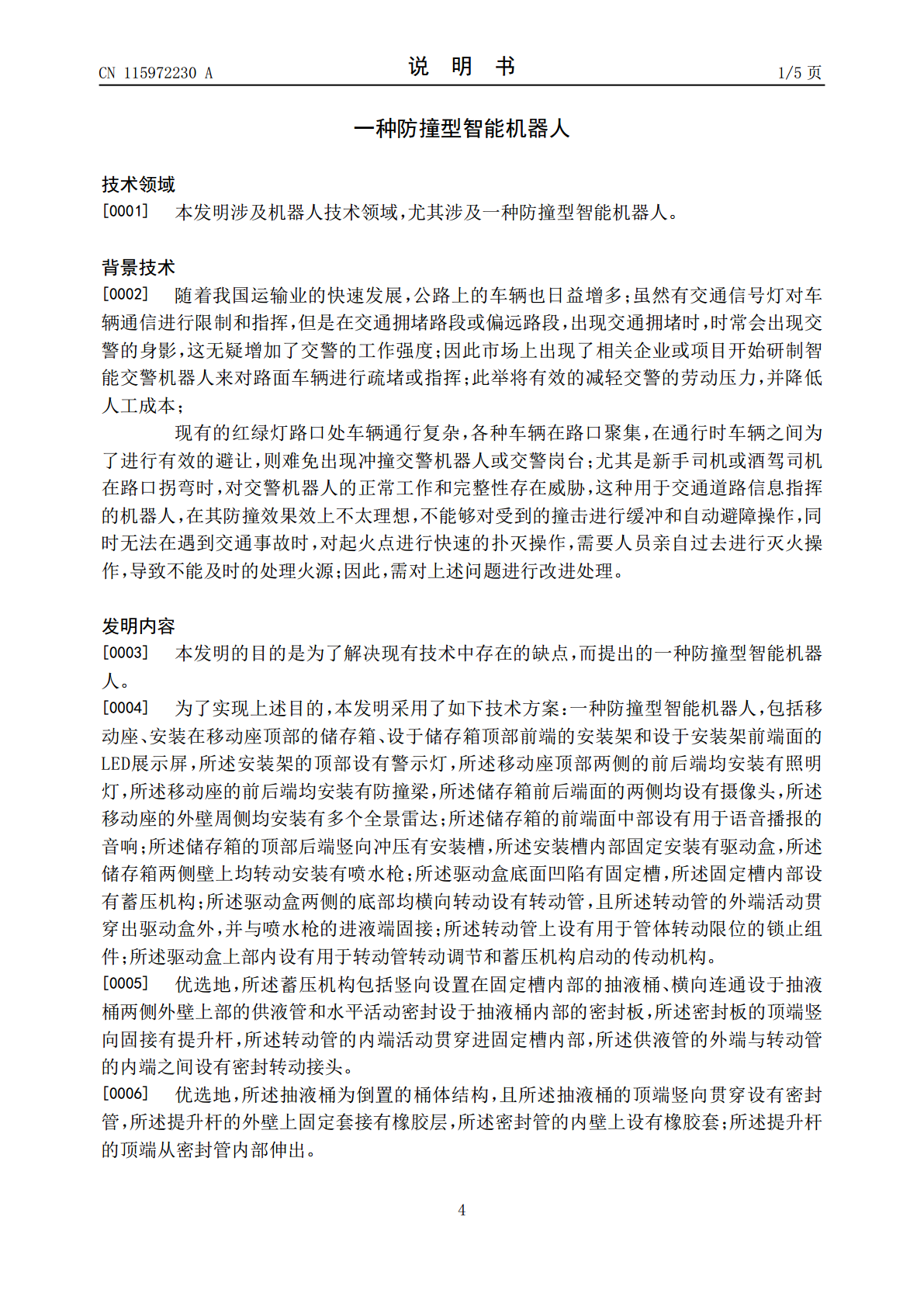
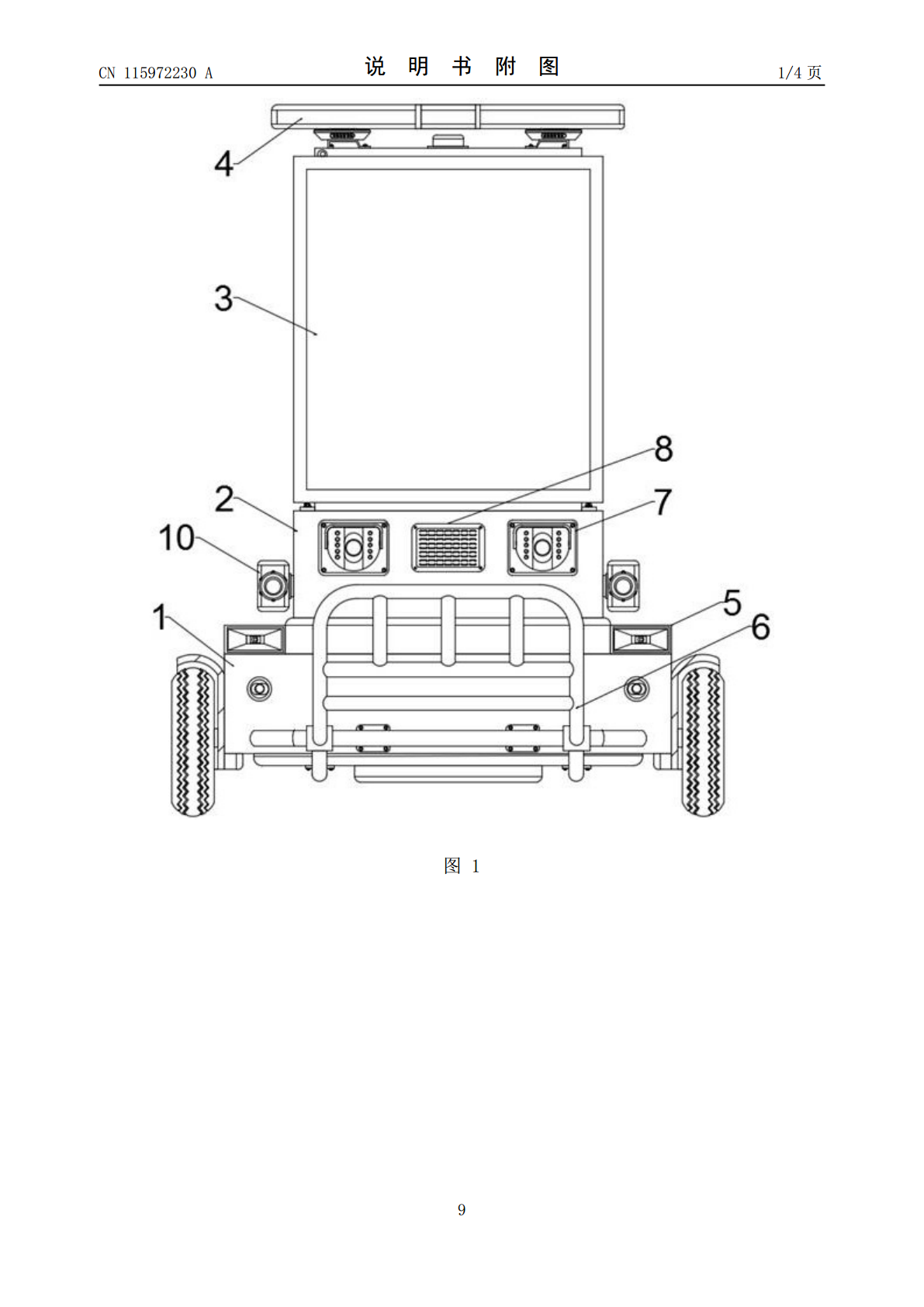
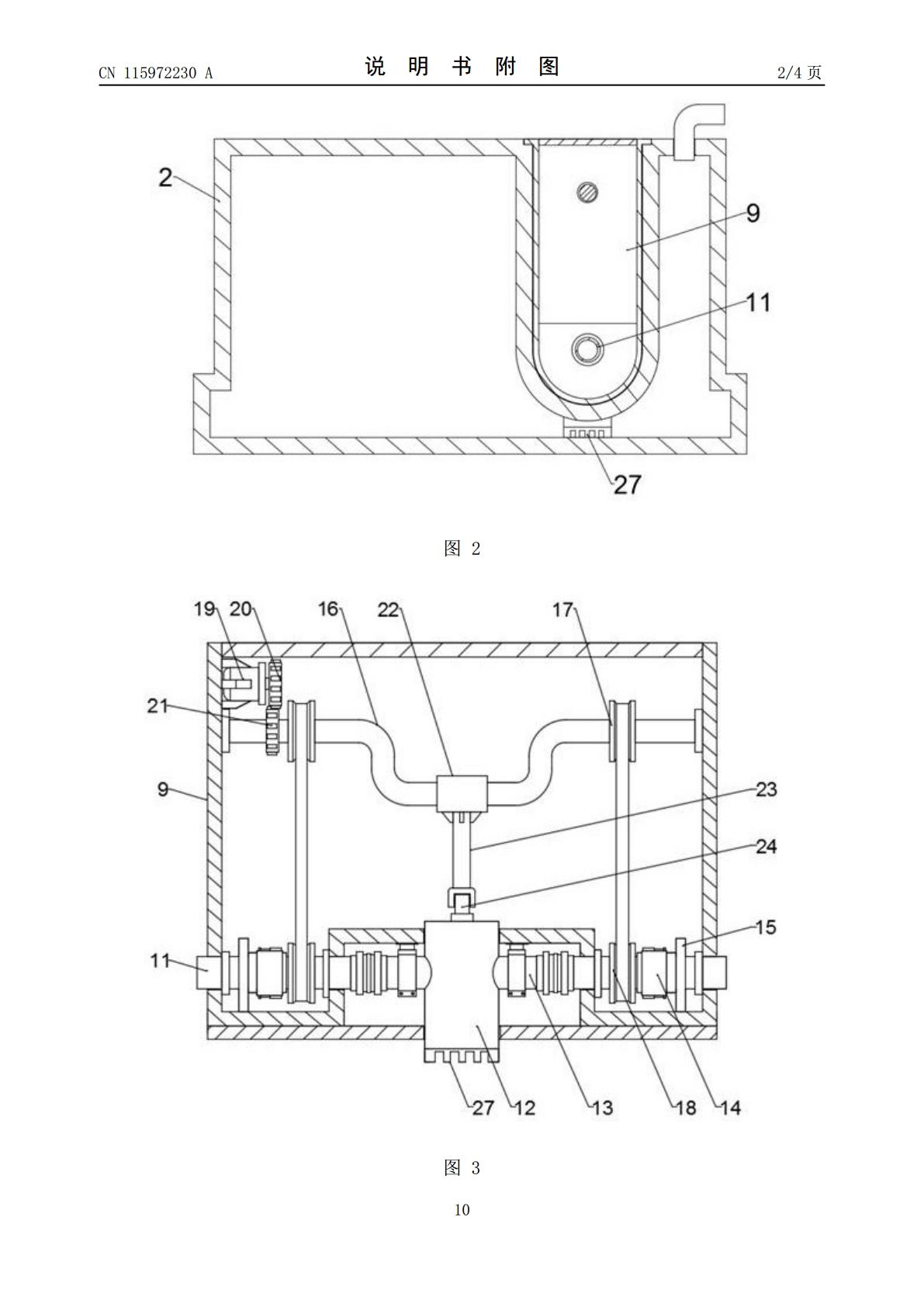
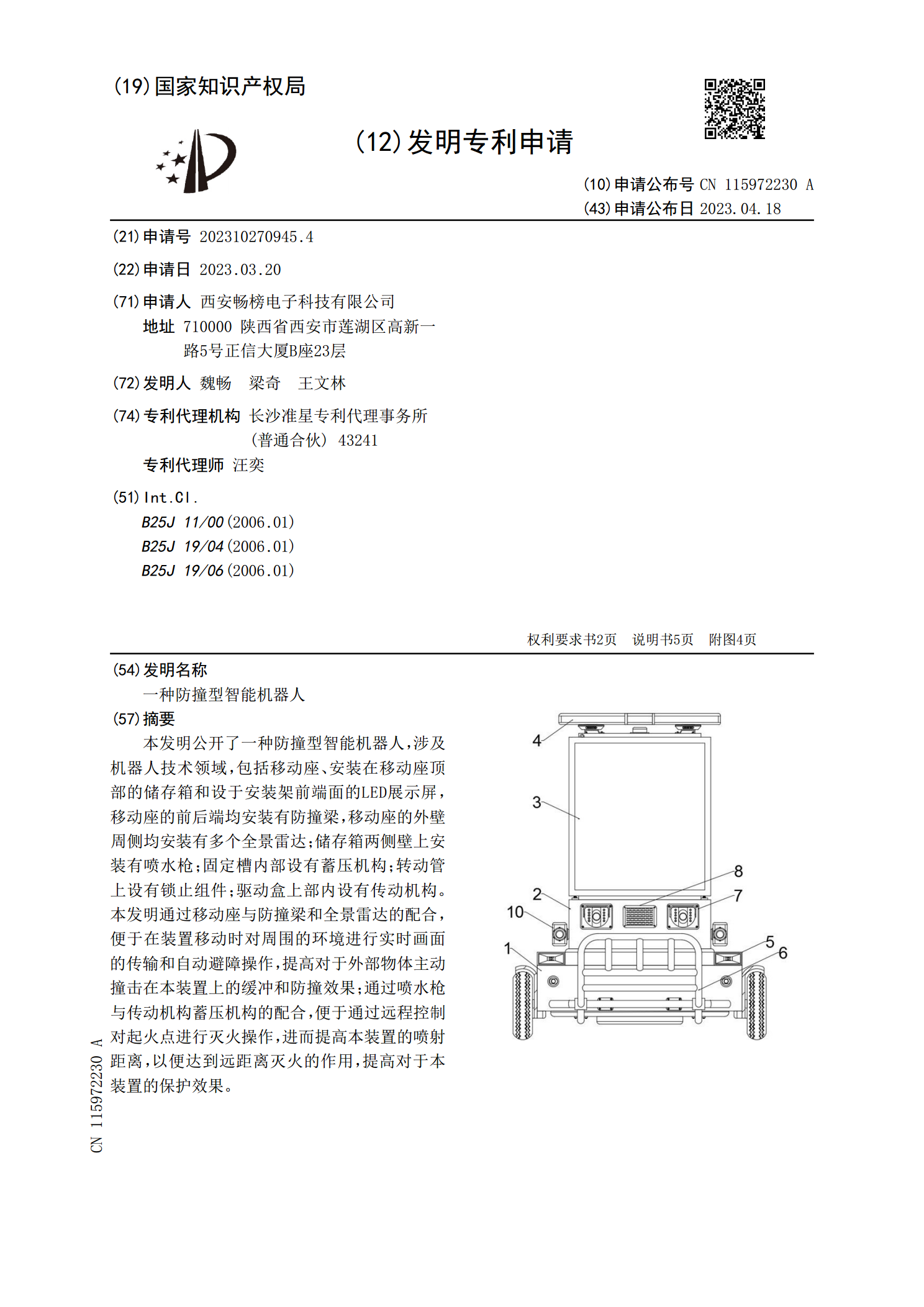
本发明公开了一种防撞型智能机器人,涉及机器人技术领域,包括移动座、安装在移动座顶部的储存箱和设于安装架前端面的LED展示屏,移动座的前后端均安装有防撞梁,移动座的外壁周侧均安装有多个全景雷达;储存箱两侧壁上安装有喷水枪;固定槽内部设有蓄压机构;转动管上设有锁止组件;驱动盒上部内设有传动机构。本发明通过移动座与防撞梁和全景雷达的配合,便于在装置移动时对周围的环境进行实时画面的传输和自动避障操作,提高对于外部物体主动撞击在本装置上的缓冲和防撞效果;通过喷水枪与传动机构蓄压机构的配合,便于通过远程控制对起火点进
一种智能机器人防撞机构.pdf
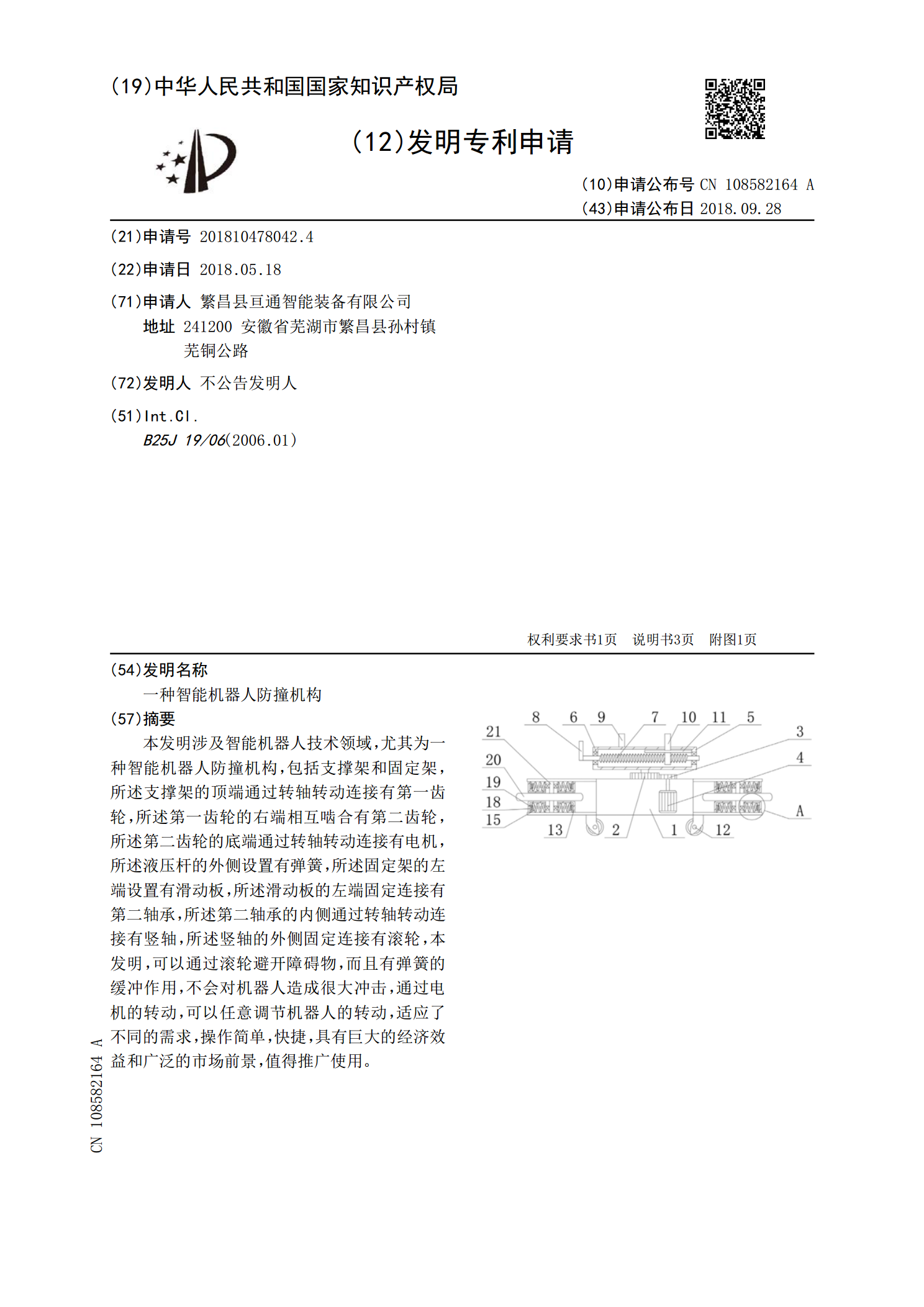
本发明涉及智能机器人技术领域,尤其为一种智能机器人防撞机构,包括支撑架和固定架,所述支撑架的顶端通过转轴转动连接有第一齿轮,所述第一齿轮的右端相互啮合有第二齿轮,所述第二齿轮的底端通过转轴转动连接有电机,所述液压杆的外侧设置有弹簧,所述固定架的左端设置有滑动板,所述滑动板的左端固定连接有第二轴承,所述第二轴承的内侧通过转轴转动连接有竖轴,所述竖轴的外侧固定连接有滚轮,本发明,可以通过滚轮避开障碍物,而且有弹簧的缓冲作用,不会对机器人造成很大冲击,通过电机的转动,可以任意调节机器人的转动,适应了不同的需求,
一种智能机器人防撞机构.pdf
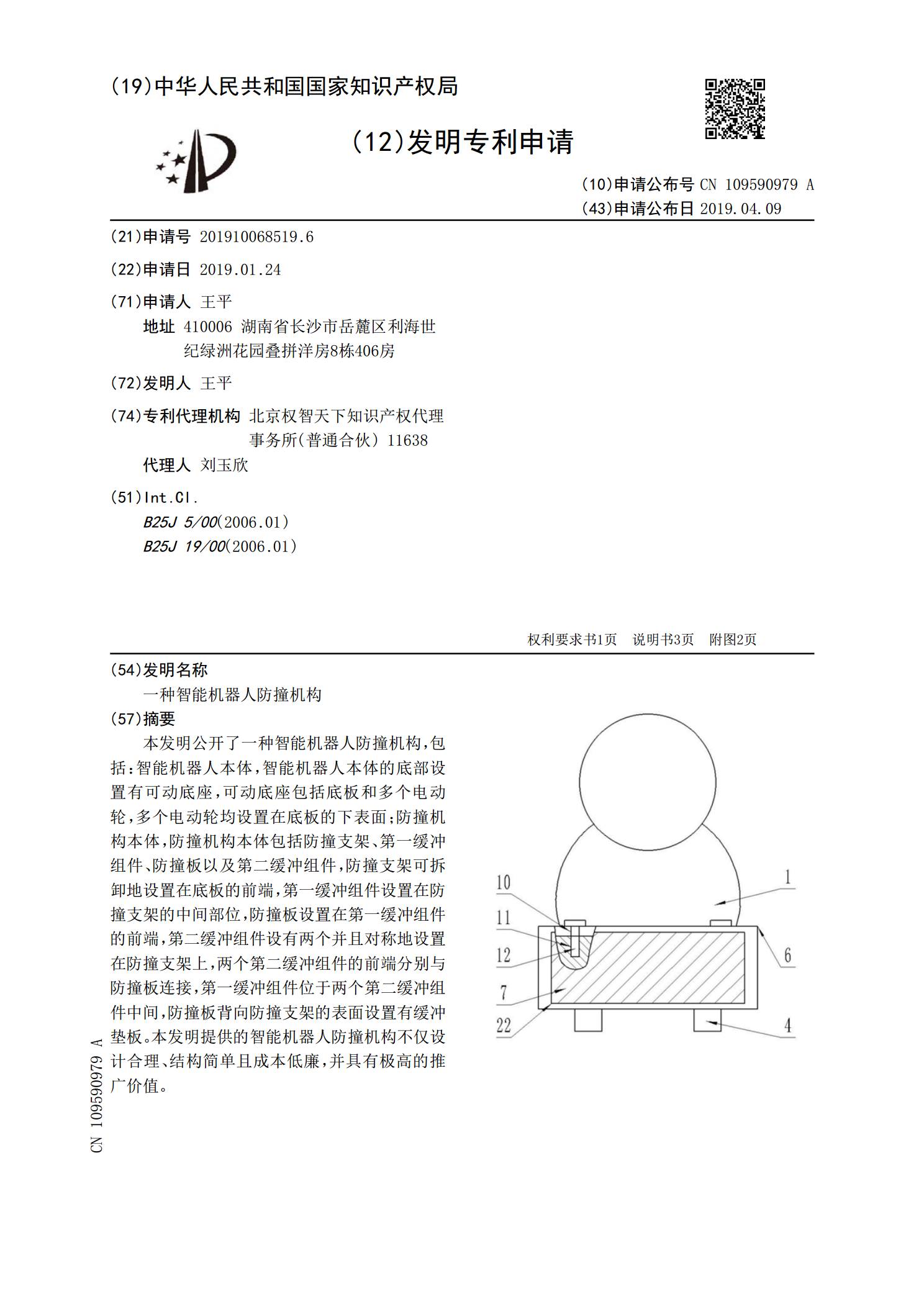
本发明公开了一种智能机器人防撞机构,包括:智能机器人本体,智能机器人本体的底部设置有可动底座,可动底座包括底板和多个电动轮,多个电动轮均设置在底板的下表面;防撞机构本体,防撞机构本体包括防撞支架、第一缓冲组件、防撞板以及第二缓冲组件,防撞支架可拆卸地设置在底板的前端,第一缓冲组件设置在防撞支架的中间部位,防撞板设置在第一缓冲组件的前端,第二缓冲组件设有两个并且对称地设置在防撞支架上,两个第二缓冲组件的前端分别与防撞板连接,第一缓冲组件位于两个第二缓冲组件中间,防撞板背向防撞支架的表面设置有缓冲垫板。本发明
一种用于智能机器人的防撞装置.pdf
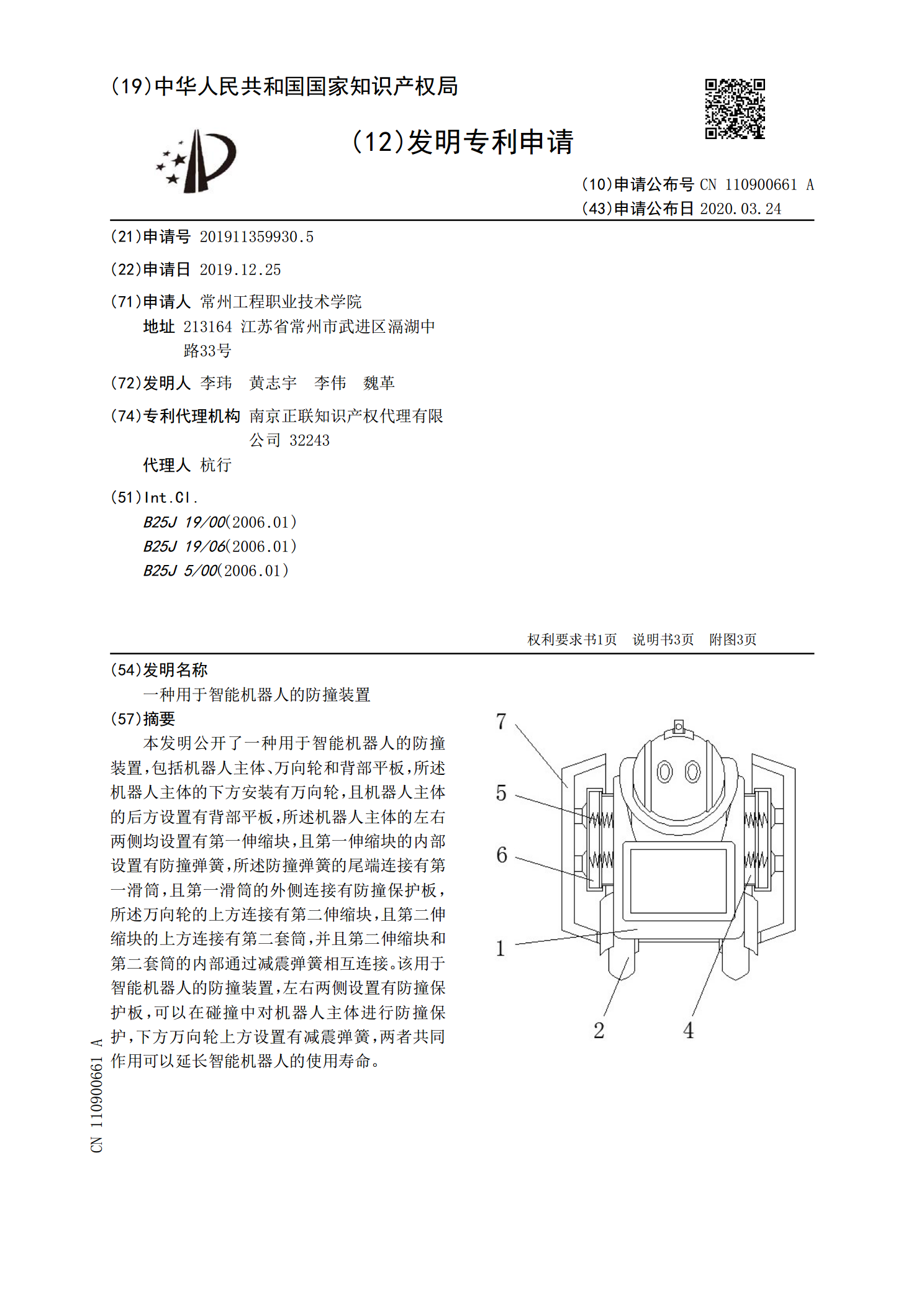
本发明公开了一种用于智能机器人的防撞装置,包括机器人主体、万向轮和背部平板,所述机器人主体的下方安装有万向轮,且机器人主体的后方设置有背部平板,所述机器人主体的左右两侧均设置有第一伸缩块,且第一伸缩块的内部设置有防撞弹簧,所述防撞弹簧的尾端连接有第一滑筒,且第一滑筒的外侧连接有防撞保护板,所述万向轮的上方连接有第二伸缩块,且第二伸缩块的上方连接有第二套筒,并且第二伸缩块和第二套筒的内部通过减震弹簧相互连接。该用于智能机器人的防撞装置,左右两侧设置有防撞保护板,可以在碰撞中对机器人主体进行防撞保护,下方万向
一种机器人防撞保护型底座.pdf
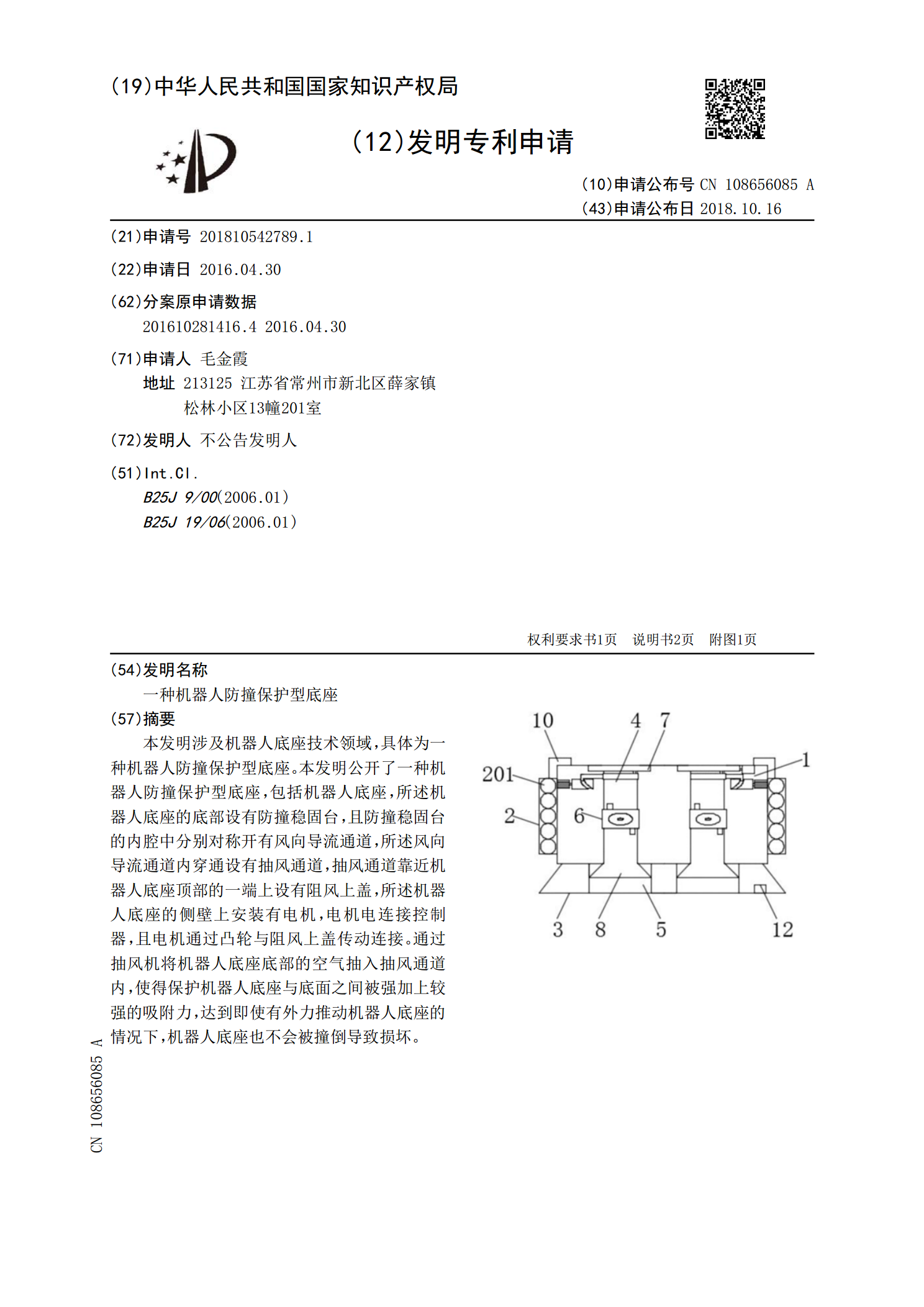
本发明涉及机器人底座技术领域,具体为一种机器人防撞保护型底座。本发明公开了一种机器人防撞保护型底座,包括机器人底座,所述机器人底座的底部设有防撞稳固台,且防撞稳固台的内腔中分别对称开有风向导流通道,所述风向导流通道内穿通设有抽风通道,抽风通道靠近机器人底座顶部的一端上设有阻风上盖,所述机器人底座的侧壁上安装有电机,电机电连接控制器,且电机通过凸轮与阻风上盖传动连接。通过抽风机将机器人底座底部的空气抽入抽风通道内,使得保护机器人底座与底面之间被强加上较强的吸附力,达到即使有外力推动机器人底座的情况下,机器人