
一种工业生产机械手用自动化夹取装置.pdf

又珊****ck

1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种工业生产机械手用自动化夹取装置.pdf
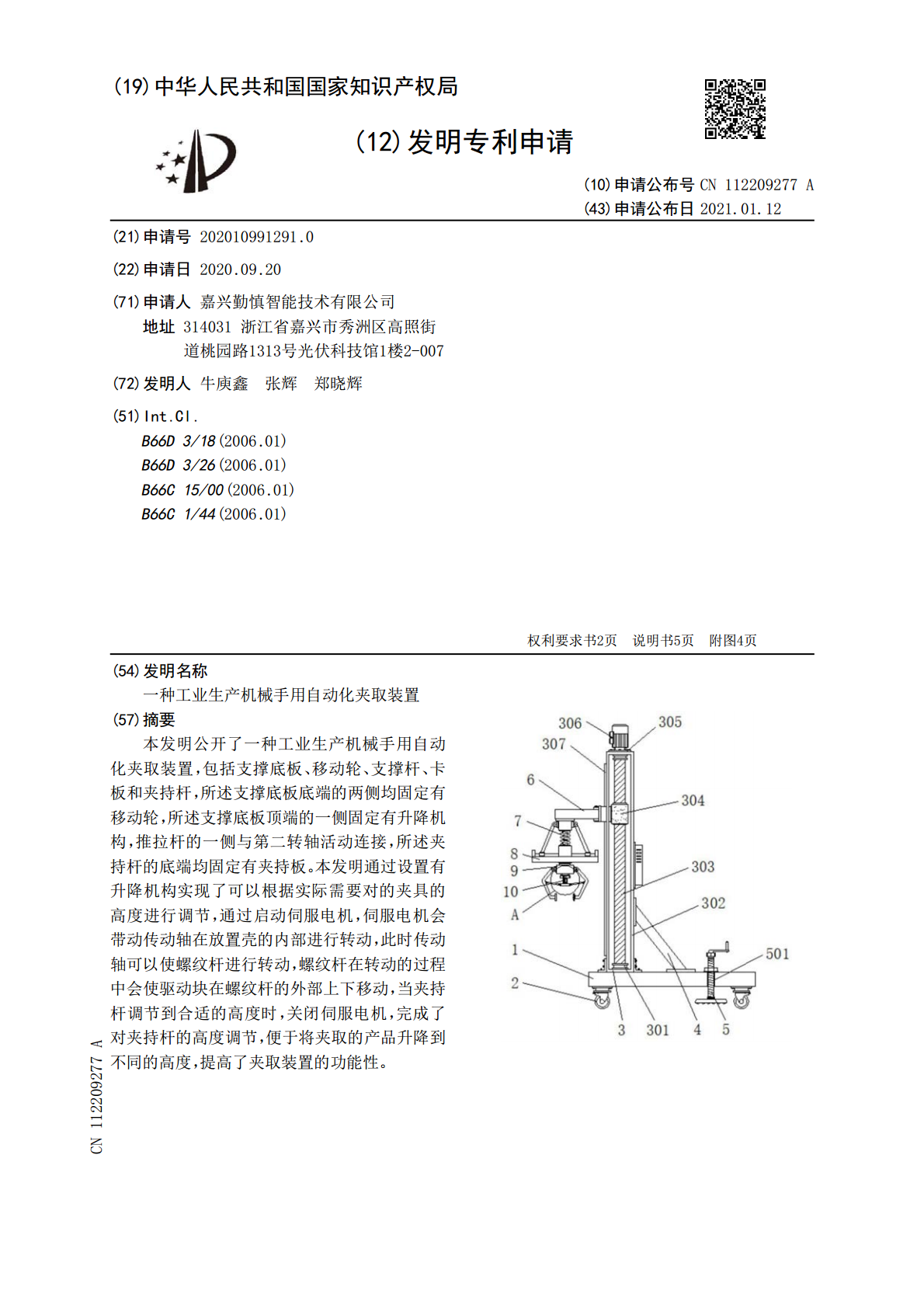
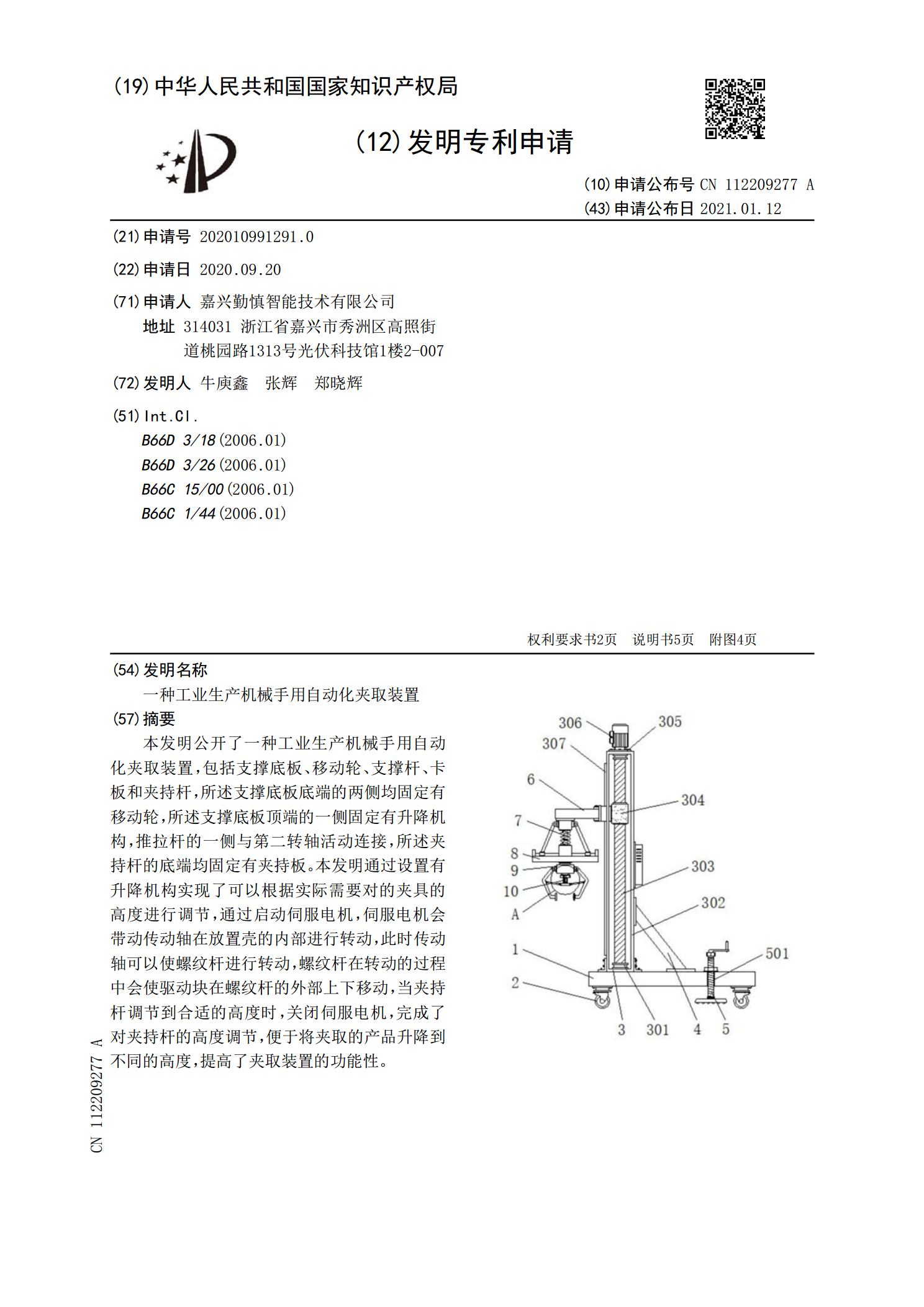
本发明公开了一种工业生产机械手用自动化夹取装置,包括支撑底板、移动轮、支撑杆、卡板和夹持杆,所述支撑底板底端的两侧均固定有移动轮,所述支撑底板顶端的一侧固定有升降机构,推拉杆的一侧与第二转轴活动连接,所述夹持杆的底端均固定有夹持板。本发明通过设置有升降机构实现了可以根据实际需要对的夹具的高度进行调节,通过启动伺服电机,伺服电机会带动传动轴在放置壳的内部进行转动,此时传动轴可以使螺纹杆进行转动,螺纹杆在转动的过程中会使驱动块在螺纹杆的外部上下移动,当夹持杆调节到合适的高度时,关闭伺服电机,完成了对夹持杆的高
一种自动化夹取装置.pdf
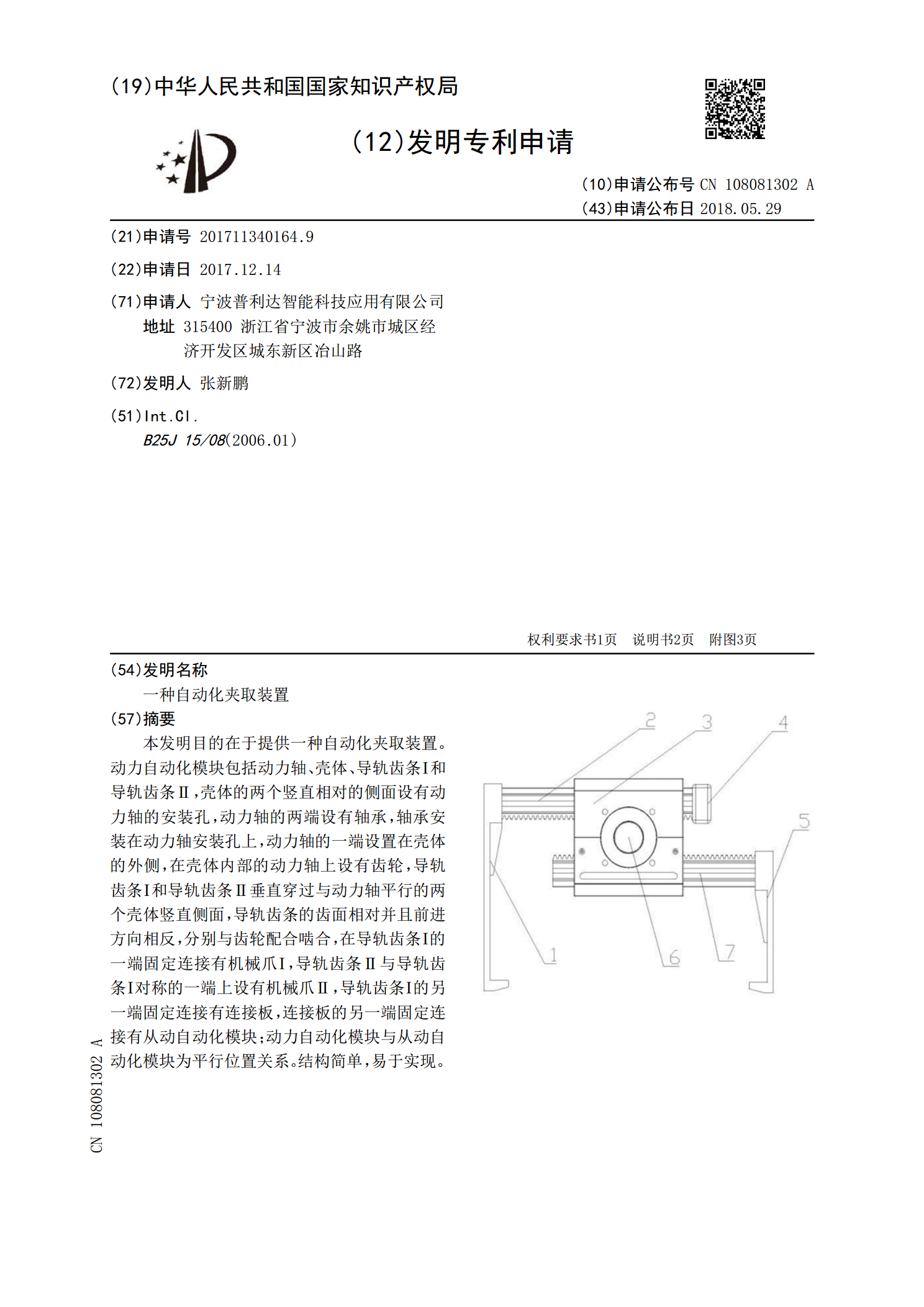
本发明目的在于提供一种自动化夹取装置。动力自动化模块包括动力轴、壳体、导轨齿条Ⅰ和导轨齿条Ⅱ,壳体的两个竖直相对的侧面设有动力轴的安装孔,动力轴的两端设有轴承,轴承安装在动力轴安装孔上,动力轴的一端设置在壳体的外侧,在壳体内部的动力轴上设有齿轮,导轨齿条Ⅰ和导轨齿条Ⅱ垂直穿过与动力轴平行的两个壳体竖直侧面,导轨齿条的齿面相对并且前进方向相反,分别与齿轮配合啮合,在导轨齿条Ⅰ的一端固定连接有机械爪Ⅰ,导轨齿条Ⅱ与导轨齿条Ⅰ对称的一端上设有机械爪Ⅱ,导轨齿条Ⅰ的另一端固定连接有连接板,连接板的另一端固定连接有
一种机械夹取装置.pdf
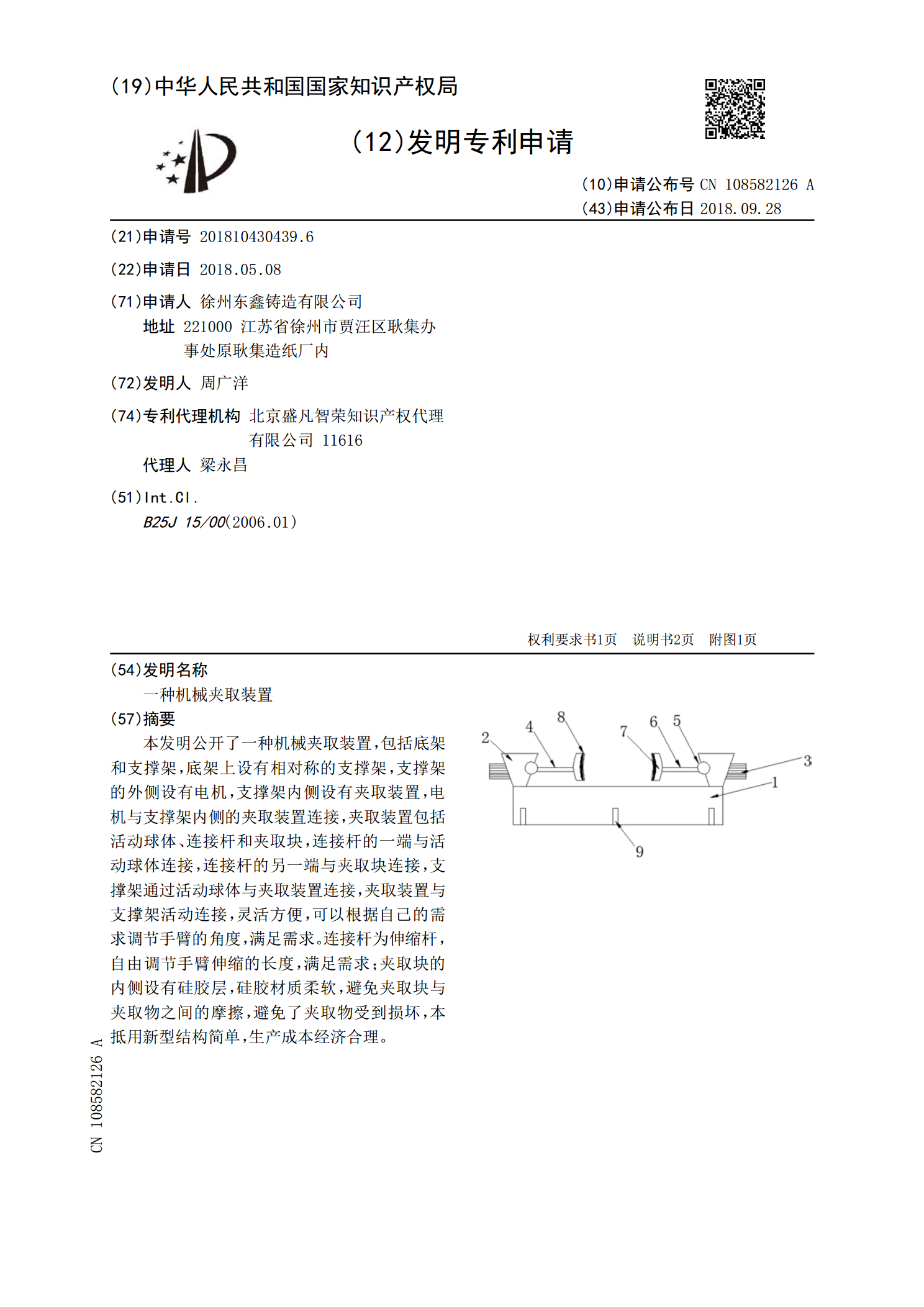
本发明公开了一种机械夹取装置,包括底架和支撑架,底架上设有相对称的支撑架,支撑架的外侧设有电机,支撑架内侧设有夹取装置,电机与支撑架内侧的夹取装置连接,夹取装置包括活动球体、连接杆和夹取块,连接杆的一端与活动球体连接,连接杆的另一端与夹取块连接,支撑架通过活动球体与夹取装置连接,夹取装置与支撑架活动连接,灵活方便,可以根据自己的需求调节手臂的角度,满足需求。连接杆为伸缩杆,自由调节手臂伸缩的长度,满足需求;夹取块的内侧设有硅胶层,硅胶材质柔软,避免夹取块与夹取物之间的摩擦,避免了夹取物受到损坏,本抵用新型

自动化夹取装置.pdf
本发明目的在于提供一种自动化夹取装置。动力自动化模块包括动力轴、壳体、导轨齿条Ⅰ和导轨齿条Ⅱ,壳体的两个竖直相对的侧面设有动力轴的安装孔,动力轴的两端设有轴承,轴承安装在动力轴安装孔上,动力轴的一端设置在壳体的外侧,在壳体内部的动力轴上设有齿轮,导轨齿条Ⅰ和导轨齿条Ⅱ垂直穿过与动力轴平行的两个壳体竖直侧面,导轨齿条的齿面相对并且前进方向相反,分别与齿轮配合啮合,在导轨齿条Ⅰ的一端固定连接有机械爪Ⅰ,导轨齿条Ⅱ与导轨齿条Ⅰ对称的一端上设有机械爪Ⅱ,导轨齿条Ⅰ的另一端固定连接有连接板,连接板的另一端固定连接有

一种精准夹取的机械装置.pdf
本发明提供一种精准夹取的机械装置,包括安装架,安装架前端设有图像采集装置,其特征在于,安装架上设有一组第一齿条,第一齿条前端设有限位档杆,第一齿条上设有一组二维机械臂,二维机械臂的两端设有一组第一转动电机,第一转动电机的输出端固定连接第一传动齿轮,第一传动齿轮和第一齿条啮合连接,二维机械臂包括横向输送装置和升降输送装置,横向输送装置的输出端固定连接升降输送装置,升降输送装置的输出端固定连接夹取机械手。本发明操作简单,维护方便,可操作性强,结构简单便于维修,牢固性强在工作过程中不会左右转动,从而达到准确调整