
一种精准夹取的机械装置.pdf

一吃****福乾

1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种精准夹取的机械装置.pdf
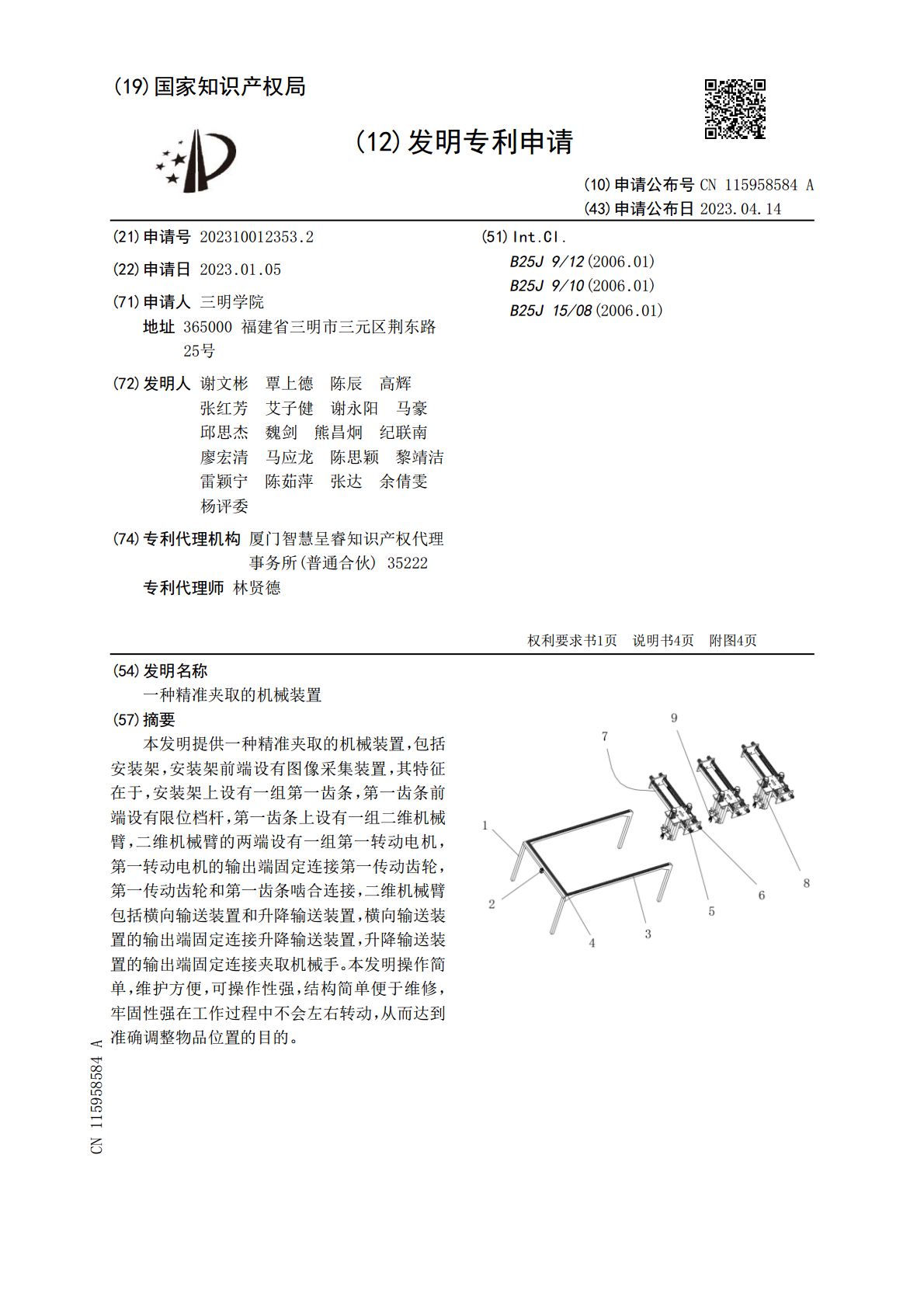
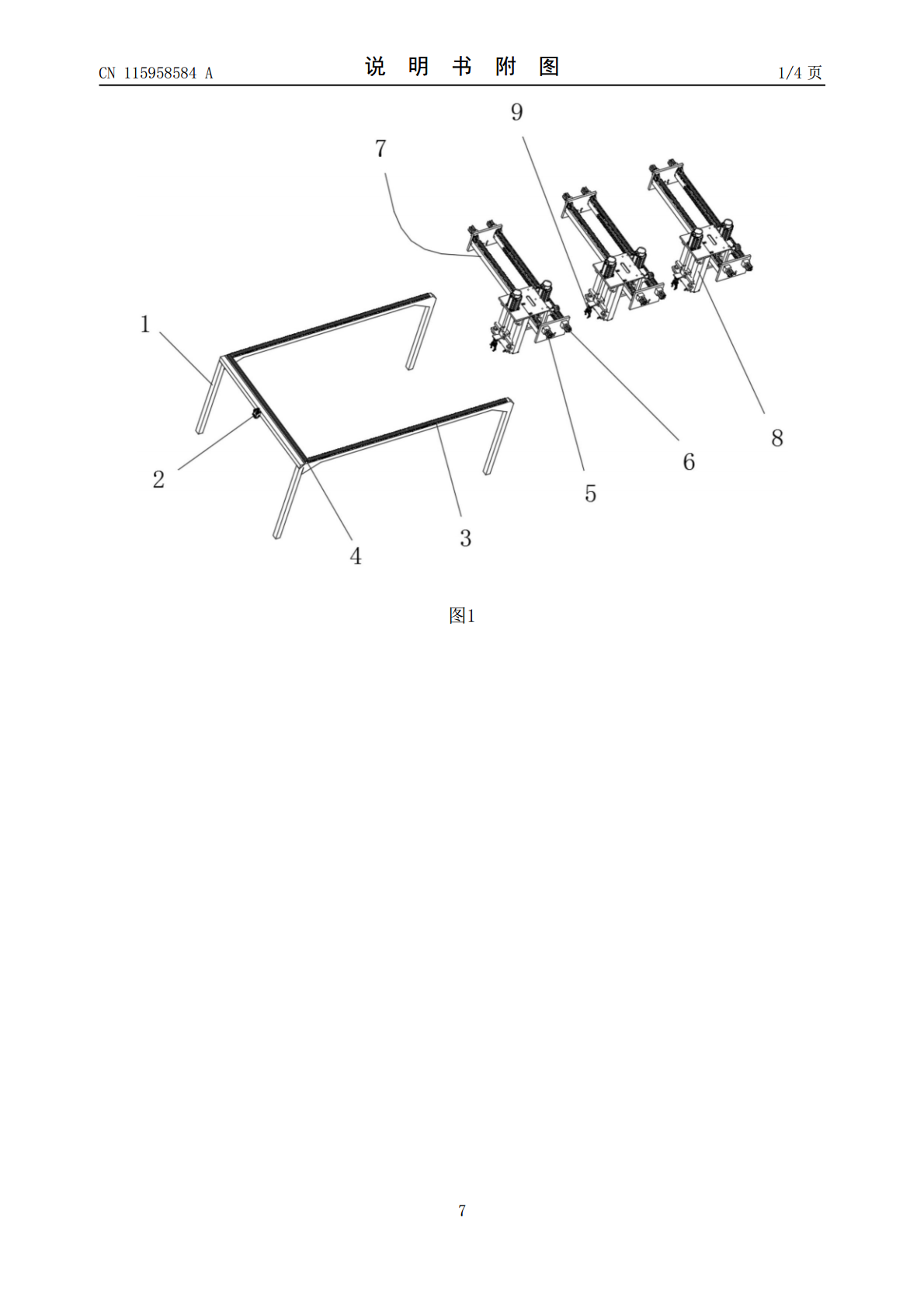
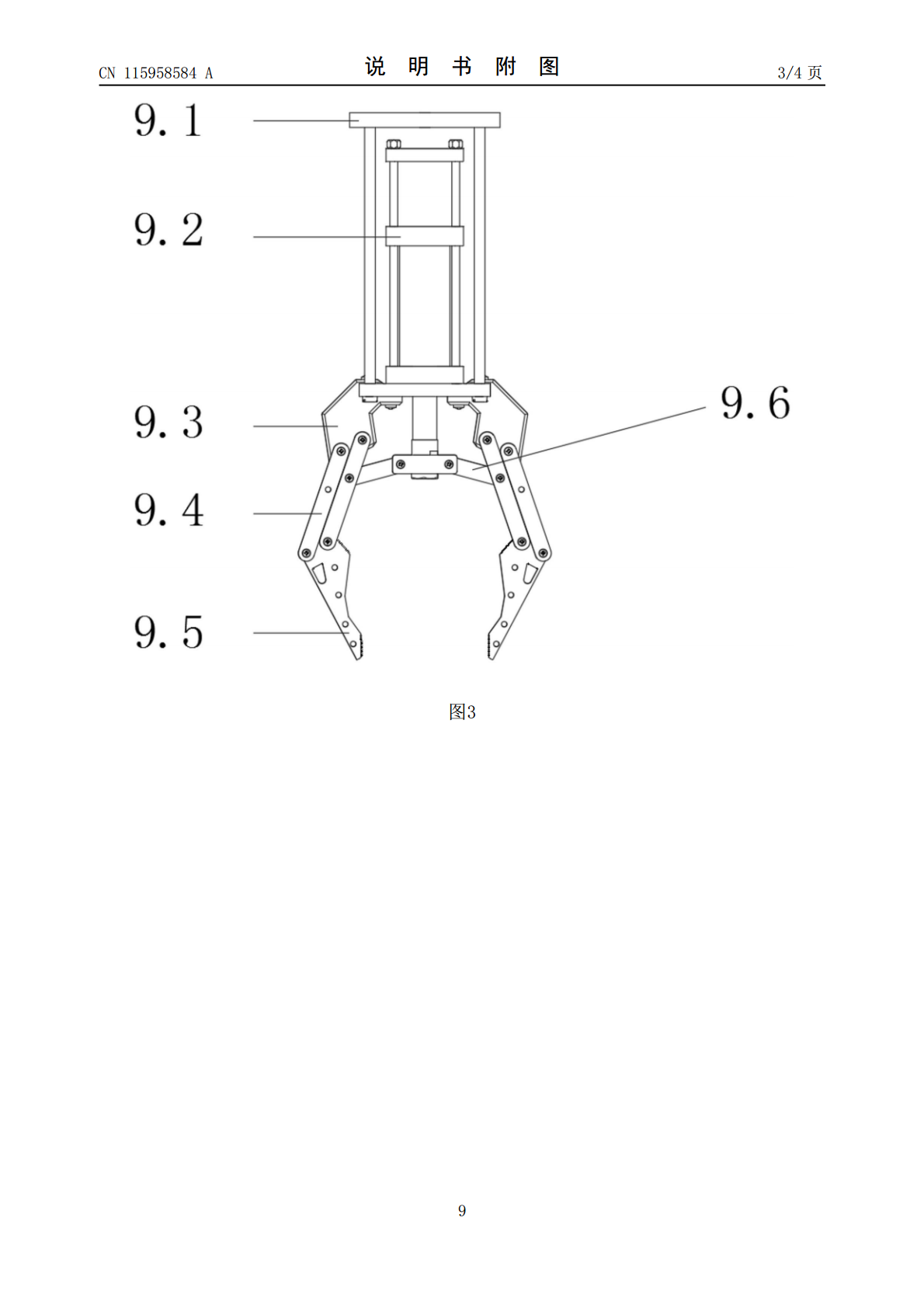
本发明提供一种精准夹取的机械装置,包括安装架,安装架前端设有图像采集装置,其特征在于,安装架上设有一组第一齿条,第一齿条前端设有限位档杆,第一齿条上设有一组二维机械臂,二维机械臂的两端设有一组第一转动电机,第一转动电机的输出端固定连接第一传动齿轮,第一传动齿轮和第一齿条啮合连接,二维机械臂包括横向输送装置和升降输送装置,横向输送装置的输出端固定连接升降输送装置,升降输送装置的输出端固定连接夹取机械手。本发明操作简单,维护方便,可操作性强,结构简单便于维修,牢固性强在工作过程中不会左右转动,从而达到准确调整
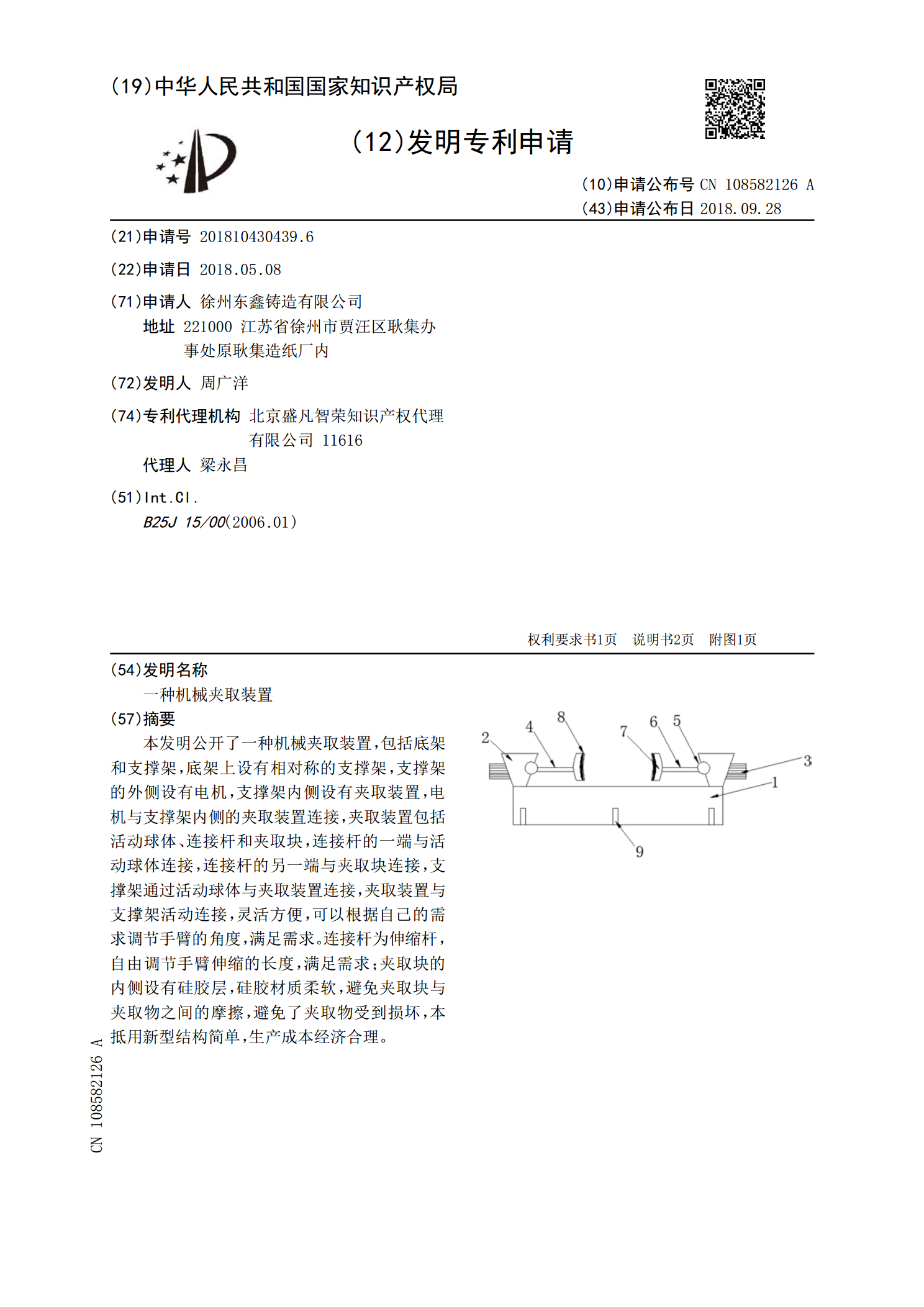
一种机械夹取装置.pdf
本发明公开了一种机械夹取装置,包括底架和支撑架,底架上设有相对称的支撑架,支撑架的外侧设有电机,支撑架内侧设有夹取装置,电机与支撑架内侧的夹取装置连接,夹取装置包括活动球体、连接杆和夹取块,连接杆的一端与活动球体连接,连接杆的另一端与夹取块连接,支撑架通过活动球体与夹取装置连接,夹取装置与支撑架活动连接,灵活方便,可以根据自己的需求调节手臂的角度,满足需求。连接杆为伸缩杆,自由调节手臂伸缩的长度,满足需求;夹取块的内侧设有硅胶层,硅胶材质柔软,避免夹取块与夹取物之间的摩擦,避免了夹取物受到损坏,本抵用新型

一种机械式夹取装置.pdf
本发明涉及机械设备领域,尤其是指一种机械式夹取装置。一种机械式夹取装置,包括支架、两个手臂和固定在支架上的电机,所述两个手臂底端分别转动安装在支架上,所述支架上还固定有相互平行的滑竿导轨和弹簧导轨,所述弹簧导轨上套有弹簧,挡块套在弹簧导轨的弹簧上方,滑竿一端固定在挡块上,滑竿另一端穿过滑竿导轨的孔与两个联动杆的通孔,两个联动杆的另一端分别与两个手臂转动连接,所述电机上安装有转线轮,绳子的一端固定在转线轮上,绳子的另一端绕过安装在支架上的定滑轮后固定在滑竿上。本发明把旋转运动转换为滑块的直线运动,采用了滑块
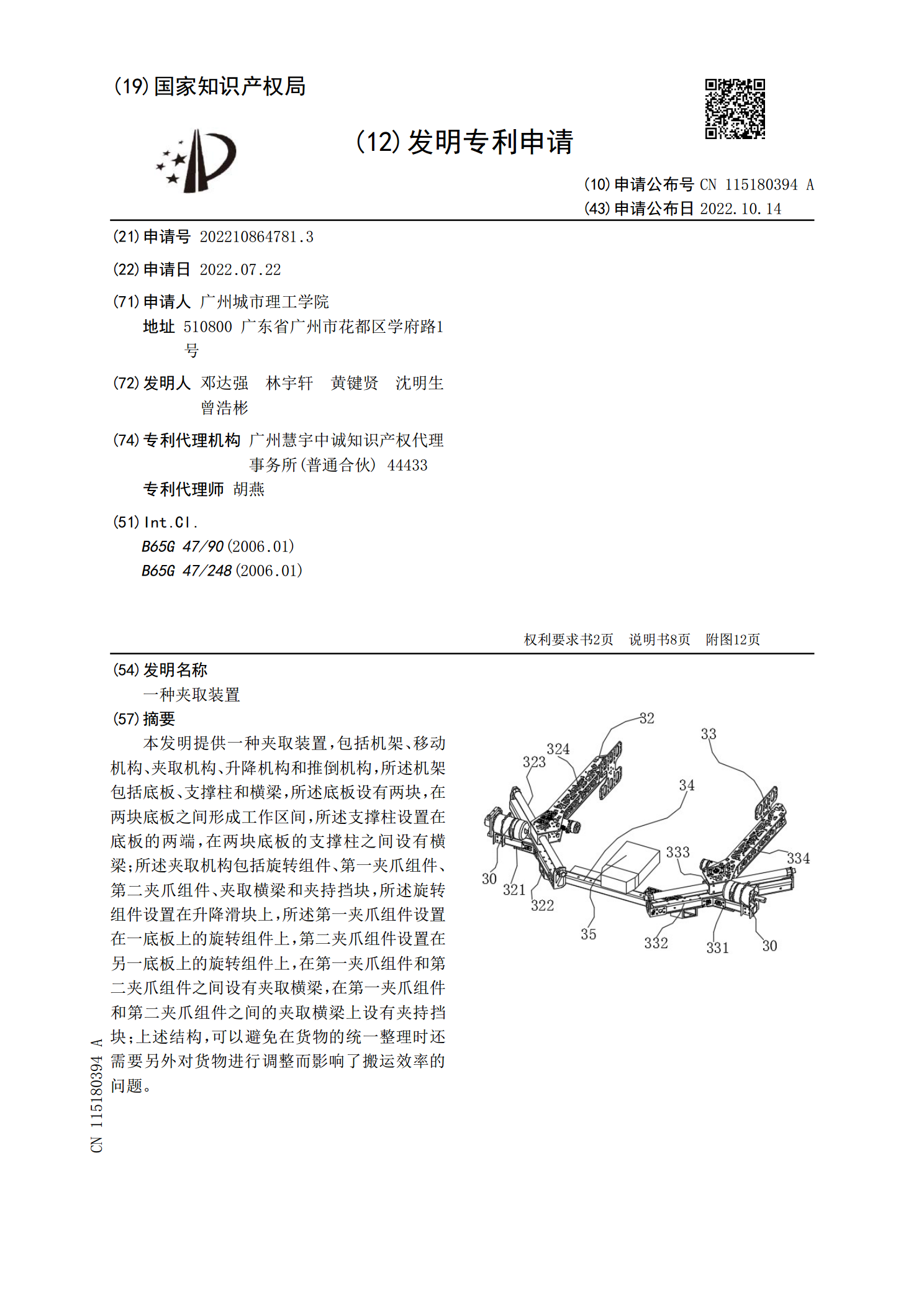
一种夹取装置.pdf
本发明提供一种夹取装置,包括机架、移动机构、夹取机构、升降机构和推倒机构,所述机架包括底板、支撑柱和横梁,所述底板设有两块,在两块底板之间形成工作区间,所述支撑柱设置在底板的两端,在两块底板的支撑柱之间设有横梁;所述夹取机构包括旋转组件、第一夹爪组件、第二夹爪组件、夹取横梁和夹持挡块,所述旋转组件设置在升降滑块上,所述第一夹爪组件设置在一底板上的旋转组件上,第二夹爪组件设置在另一底板上的旋转组件上,在第一夹爪组件和第二夹爪组件之间设有夹取横梁,在第一夹爪组件和第二夹爪组件之间的夹取横梁上设有夹持挡块;上述
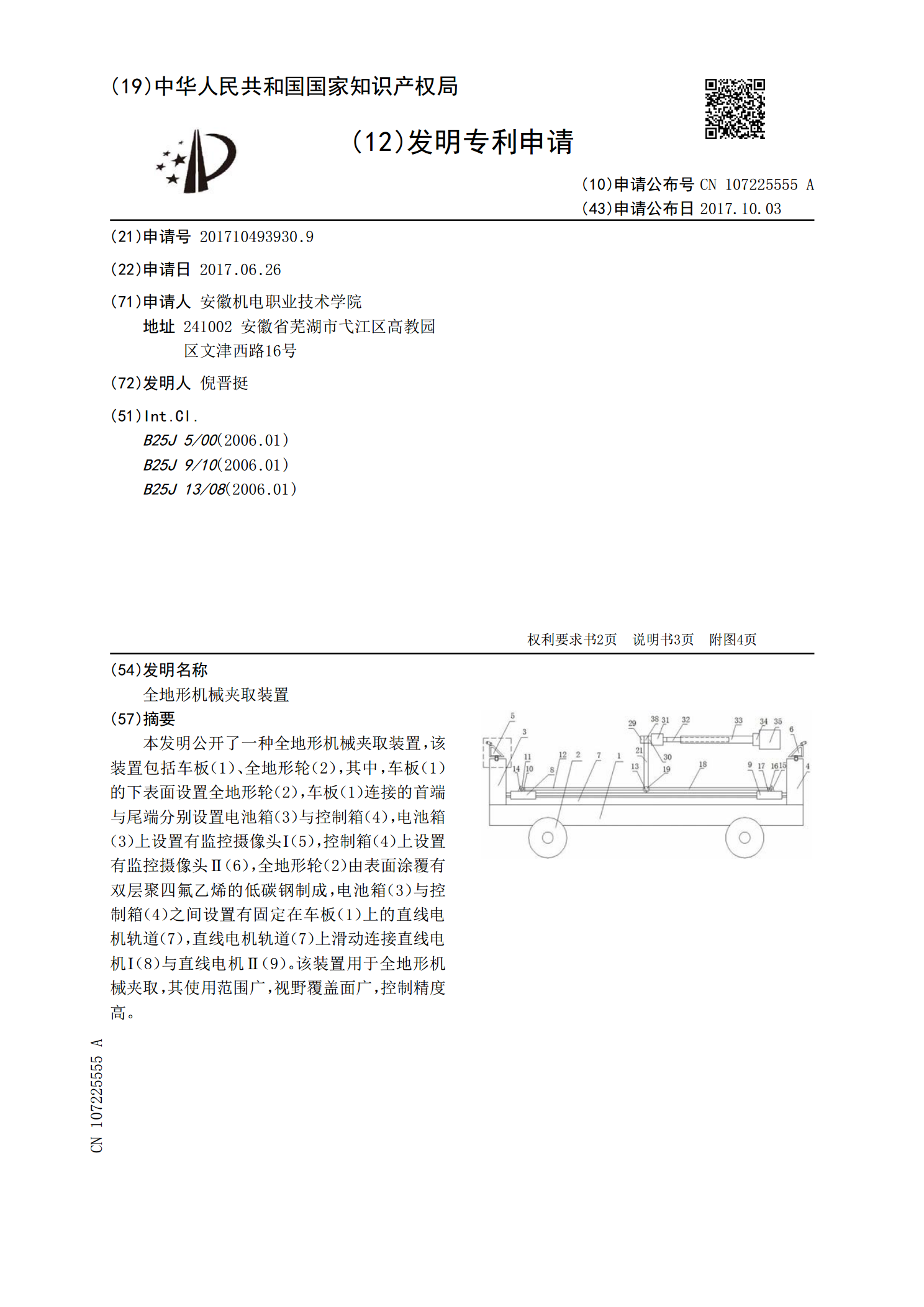
全地形机械夹取装置.pdf
本发明公开了一种全地形机械夹取装置,该装置包括车板(1)、全地形轮(2),其中,车板(1)的下表面设置全地形轮(2),车板(1)连接的首端与尾端分别设置电池箱(3)与控制箱(4),电池箱(3)上设置有监控摄像头Ⅰ(5),控制箱(4)上设置有监控摄像头Ⅱ(6),全地形轮(2)由表面涂覆有双层聚四氟乙烯的低碳钢制成,电池箱(3)与控制箱(4)之间设置有固定在车板(1)上的直线电机轨道(7),直线电机轨道(7)上滑动连接直线电机Ⅰ(8)与直线电机Ⅱ(9)。该装置用于全地形机械夹取,其使用范围广,视野覆盖面广,控