
一种植保无人机.pdf

春岚****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种农用植保无人机.pdf
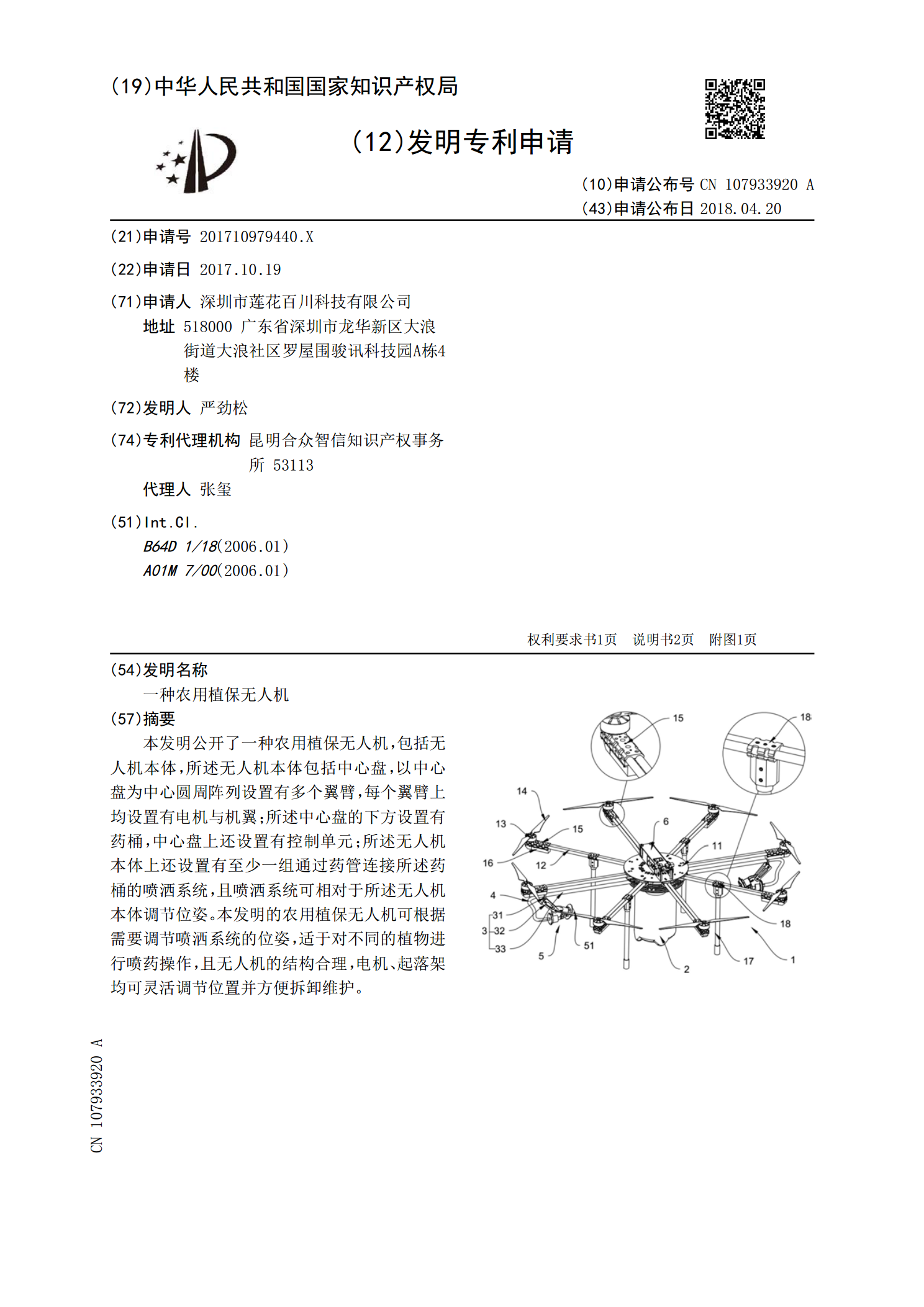
本发明公开了一种农用植保无人机,包括无人机本体,所述无人机本体包括中心盘,以中心盘为中心圆周阵列设置有多个翼臂,每个翼臂上均设置有电机与机翼;所述中心盘的下方设置有药桶,中心盘上还设置有控制单元;所述无人机本体上还设置有至少一组通过药管连接所述药桶的喷洒系统,且喷洒系统可相对于所述无人机本体调节位姿。本发明的农用植保无人机可根据需要调节喷洒系统的位姿,适于对不同的植物进行喷药操作,且无人机的结构合理,电机、起落架均可灵活调节位置并方便拆卸维护。

一种植保无人机.pdf
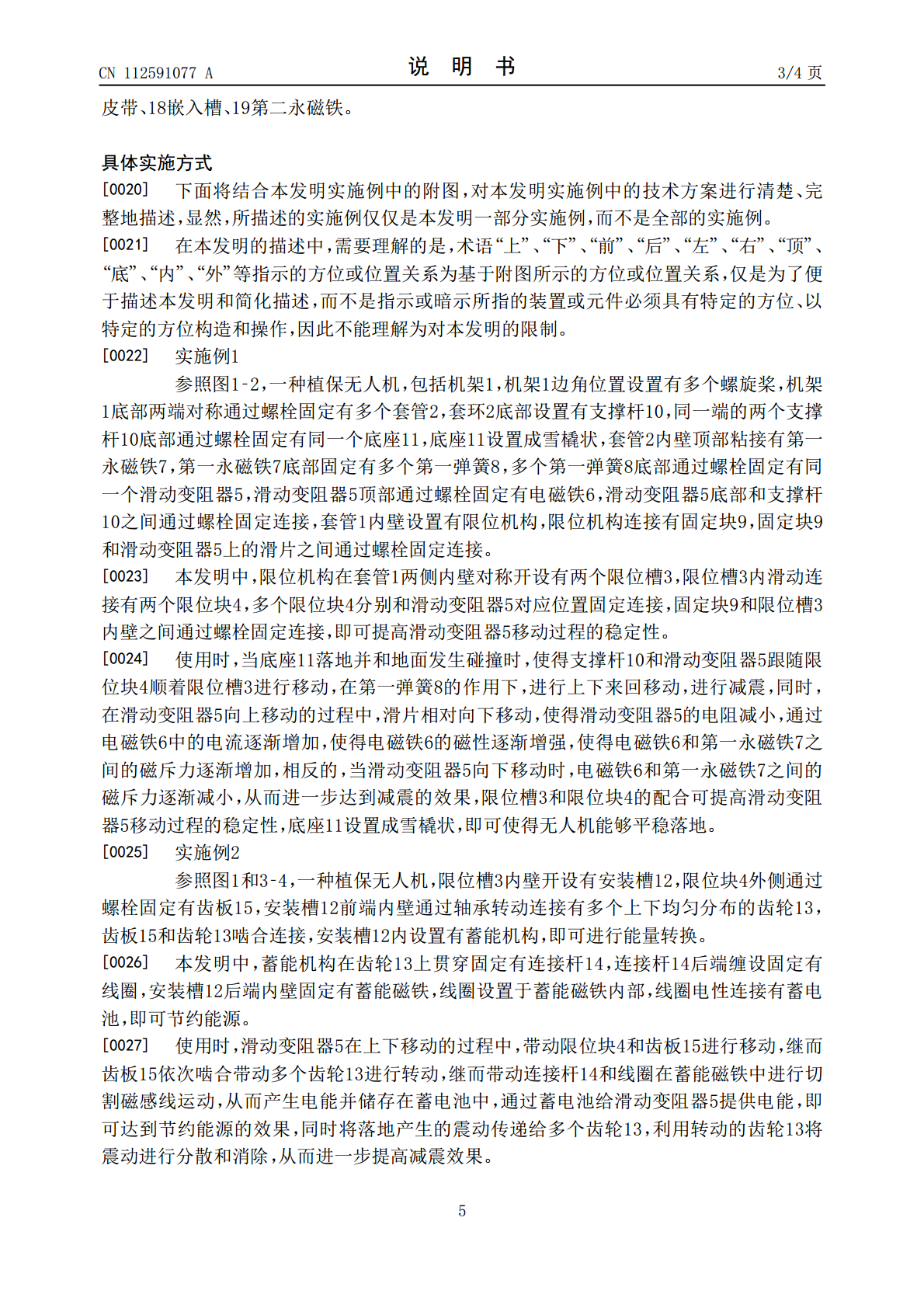
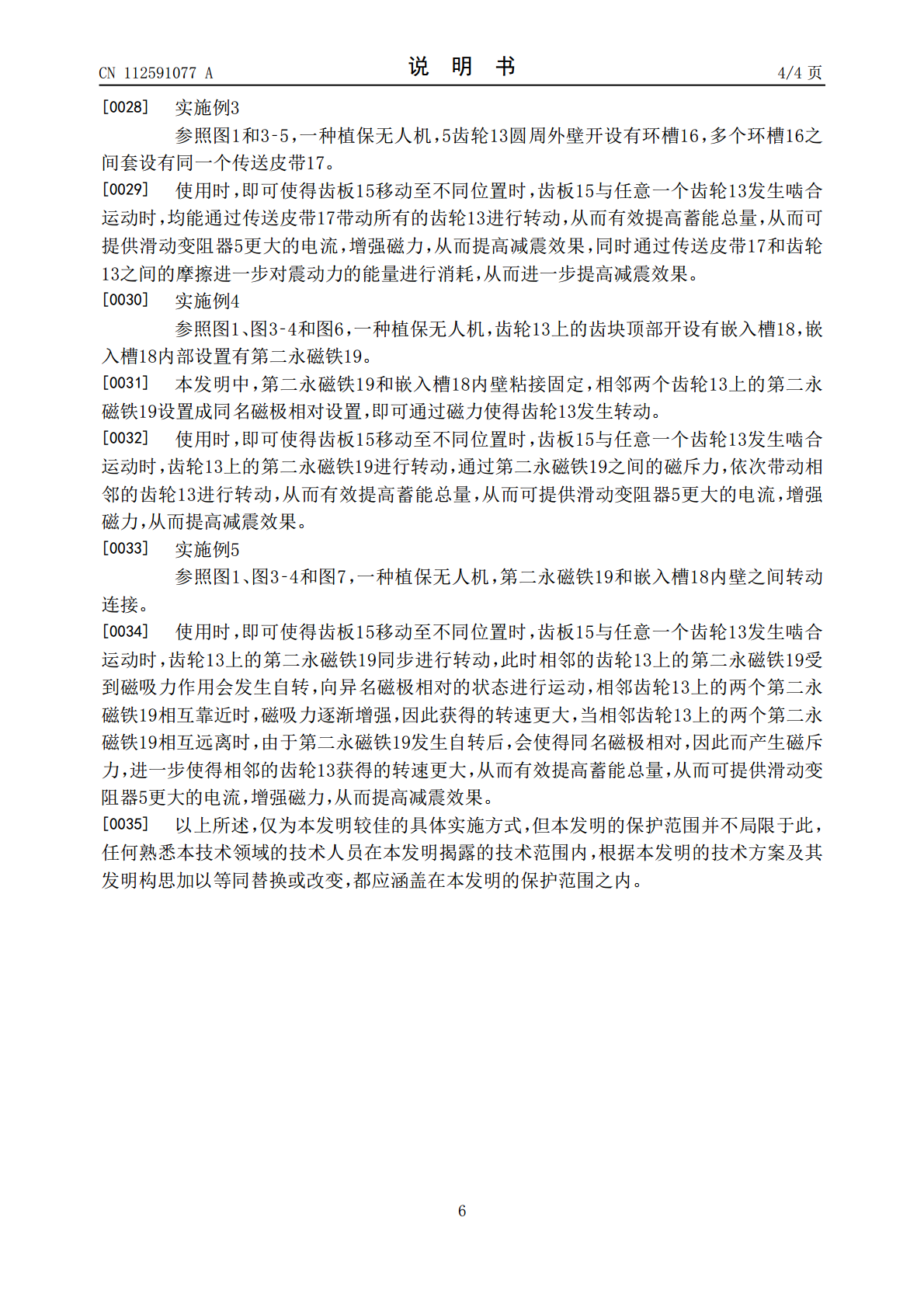
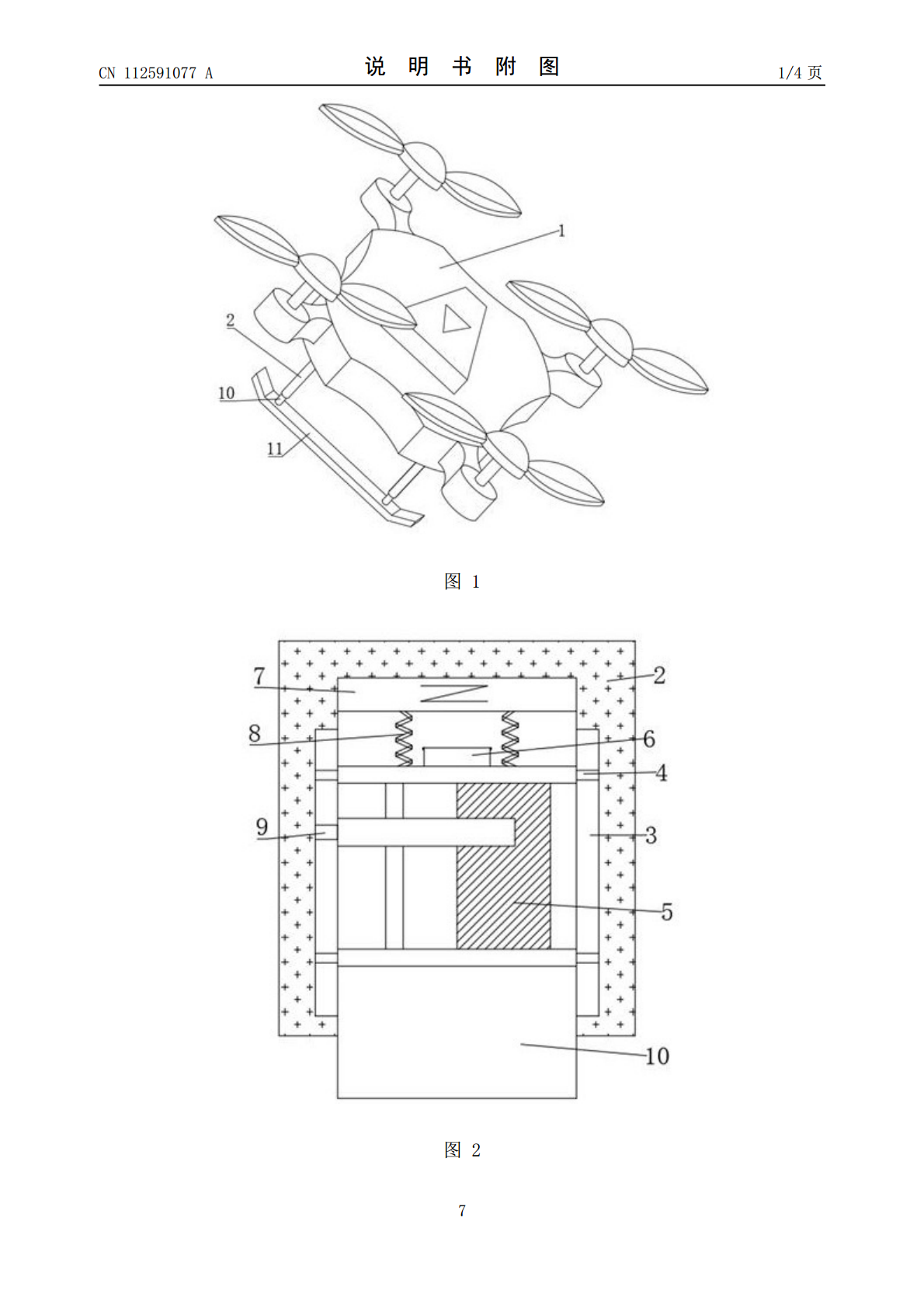
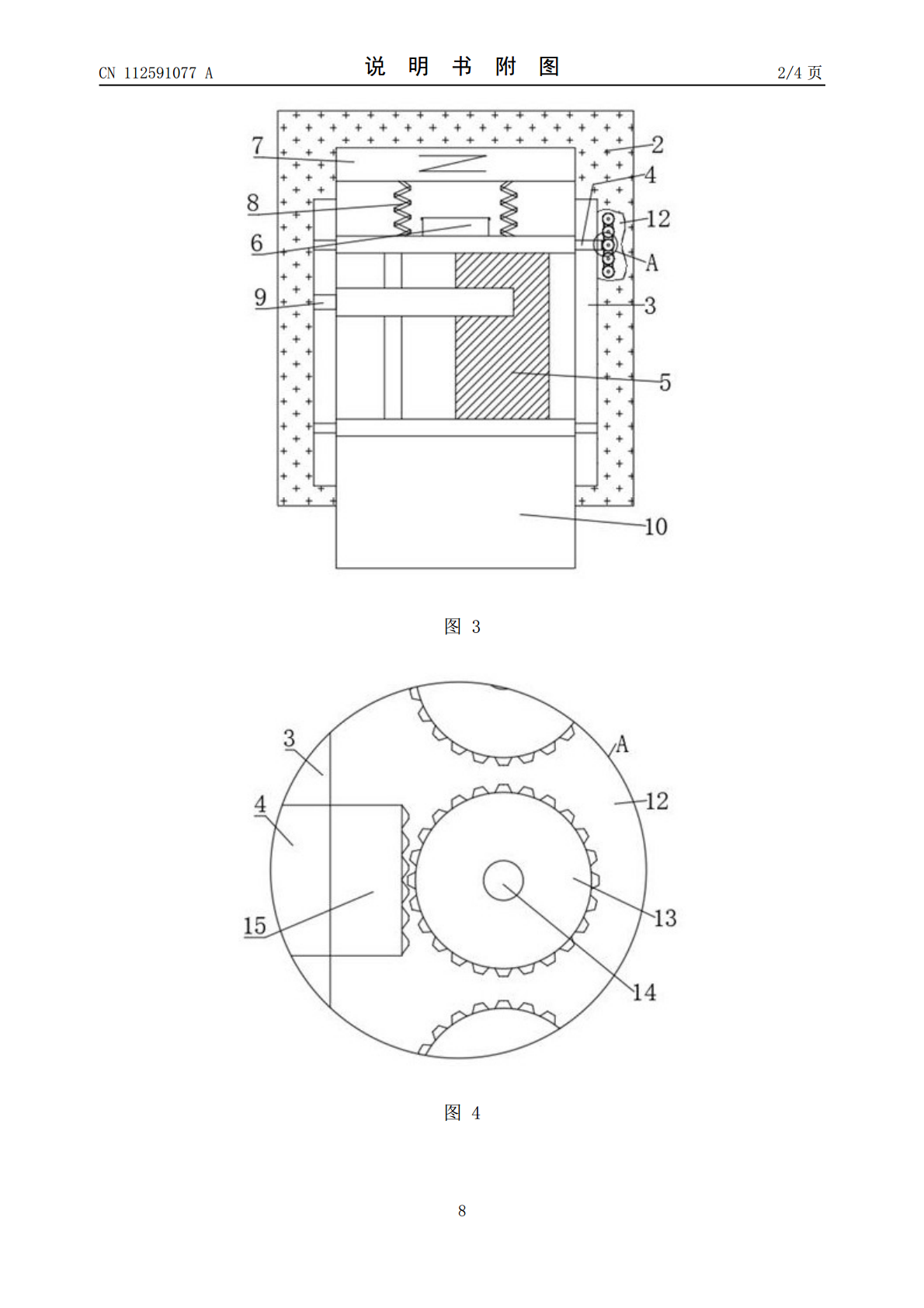
本发明属于无人机技术领域,尤其是一种植保无人机,针对现有无人机减震效果不佳的问题,现提出以下方案,包括机架,机架底部固定有多个套管,套环底部设置有支撑杆,两个支撑杆底部固定有底座,所述套管内壁顶部粘接有第一永磁铁,第一永磁铁底部固定有多个第一弹簧,多个第一弹簧底部固定有滑动变阻器,滑动变阻器顶部固定有电磁铁,滑动变阻器底部和支撑杆之间固定连接。本发明中,滑动变阻器向上移动的过程中,滑片相对向下移动,使得滑动变阻器的电阻减小,通过电磁铁中的电流逐渐增加,使得电磁铁的磁性逐渐增强,使得电磁铁和第一永磁铁之间的
一种植保无人机.pdf
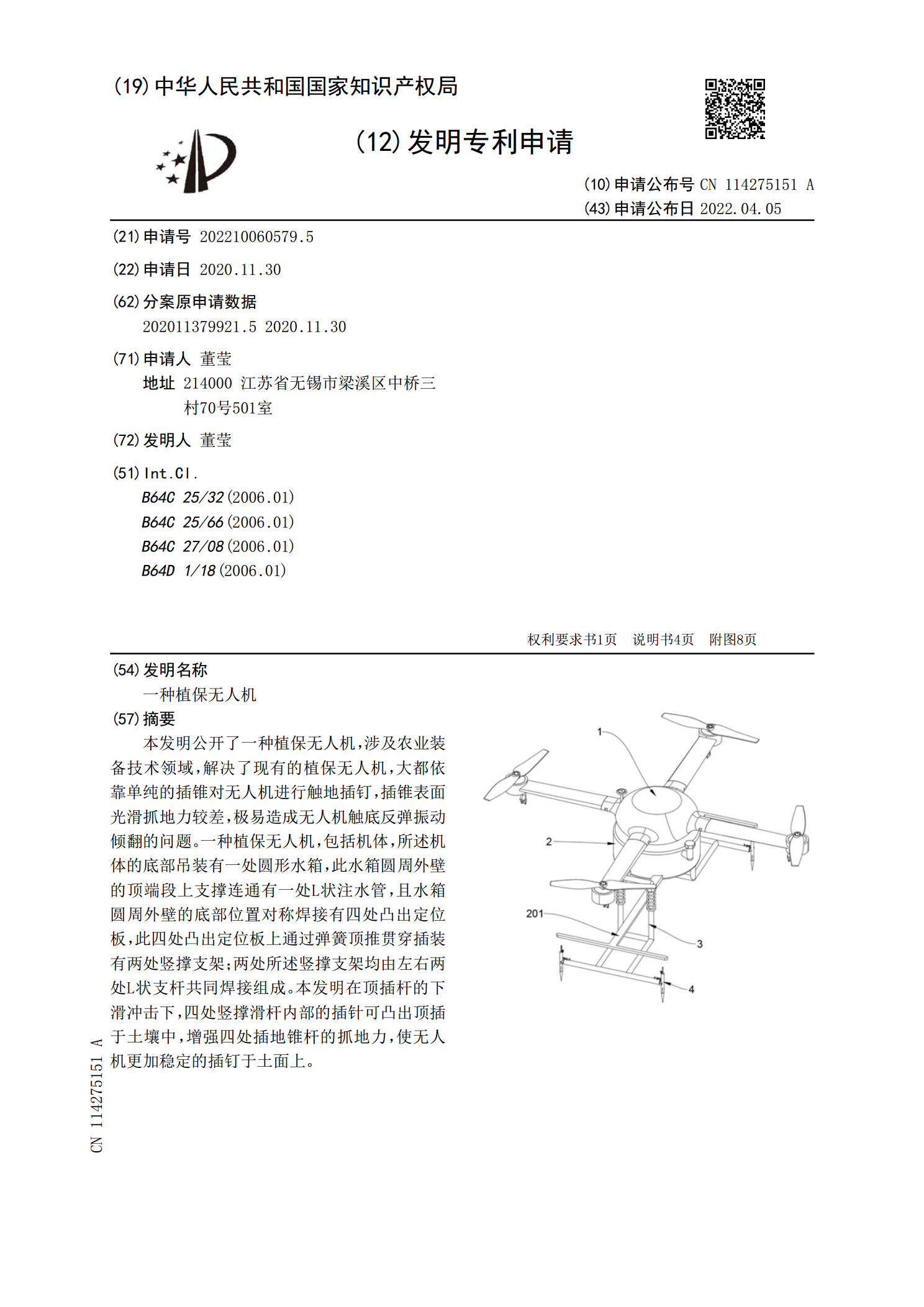
本发明公开了一种植保无人机,涉及农业装备技术领域,解决了现有的植保无人机,大都依靠单纯的插锥对无人机进行触地插钉,插锥表面光滑抓地力较差,极易造成无人机触底反弹振动倾翻的问题。一种植保无人机,包括机体,所述机体的底部吊装有一处圆形水箱,此水箱圆周外壁的顶端段上支撑连通有一处L状注水管,且水箱圆周外壁的底部位置对称焊接有四处凸出定位板,此四处凸出定位板上通过弹簧顶推贯穿插装有两处竖撑支架;两处所述竖撑支架均由左右两处L状支杆共同焊接组成。本发明在顶插杆的下滑冲击下,四处竖撑滑杆内部的插针可凸出顶插于土壤中,
一种植保无人机.pdf
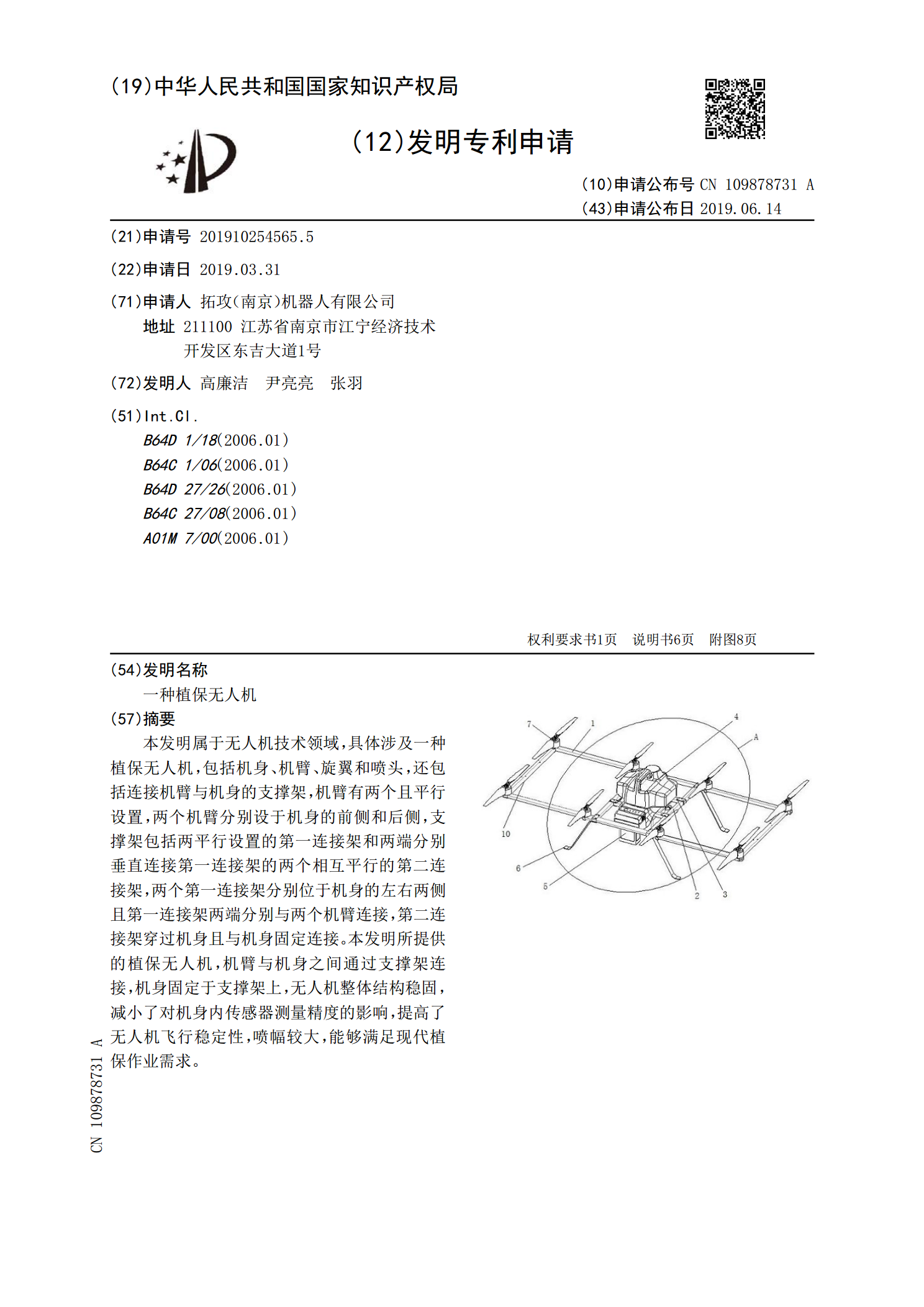
本发明属于无人机技术领域,具体涉及一种植保无人机,包括机身、机臂、旋翼和喷头,还包括连接机臂与机身的支撑架,机臂有两个且平行设置,两个机臂分别设于机身的前侧和后侧,支撑架包括两平行设置的第一连接架和两端分别垂直连接第一连接架的两个相互平行的第二连接架,两个第一连接架分别位于机身的左右两侧且第一连接架两端分别与两个机臂连接,第二连接架穿过机身且与机身固定连接。本发明所提供的植保无人机,机臂与机身之间通过支撑架连接,机身固定于支撑架上,无人机整体结构稳固,减小了对机身内传感器测量精度的影响,提高了无人机飞行稳

一种植保无人机.pdf
本发明涉及无人机技术领域,公开了一种植保无人机,包括无人机本体和储液罐,储液罐上置有连接部,连接部侧壁设有多个通孔,连接部外壁设置有气缸,无人机本体底部设置有底座,底座侧壁设有多个与气缸配合的安装孔,储液罐底部设有减震器和车轮,减震器内设置有两个交叉设置的刚性弹簧;本发明在可以有效吸收储液罐横向和竖直方向的震动,从而运行平稳,而且本发明无人机本体和储液罐可拆卸,不仅可以解决现有无人机本体和储液罐一体式,在不使用储液罐时,导致无人机负重过多,行动不方便的问题,而且储液罐上部的连接部和无人机本体下部的底座配合