
一种可以多角度夹取的机械机器人用机械臂.pdf

睿达****的的

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
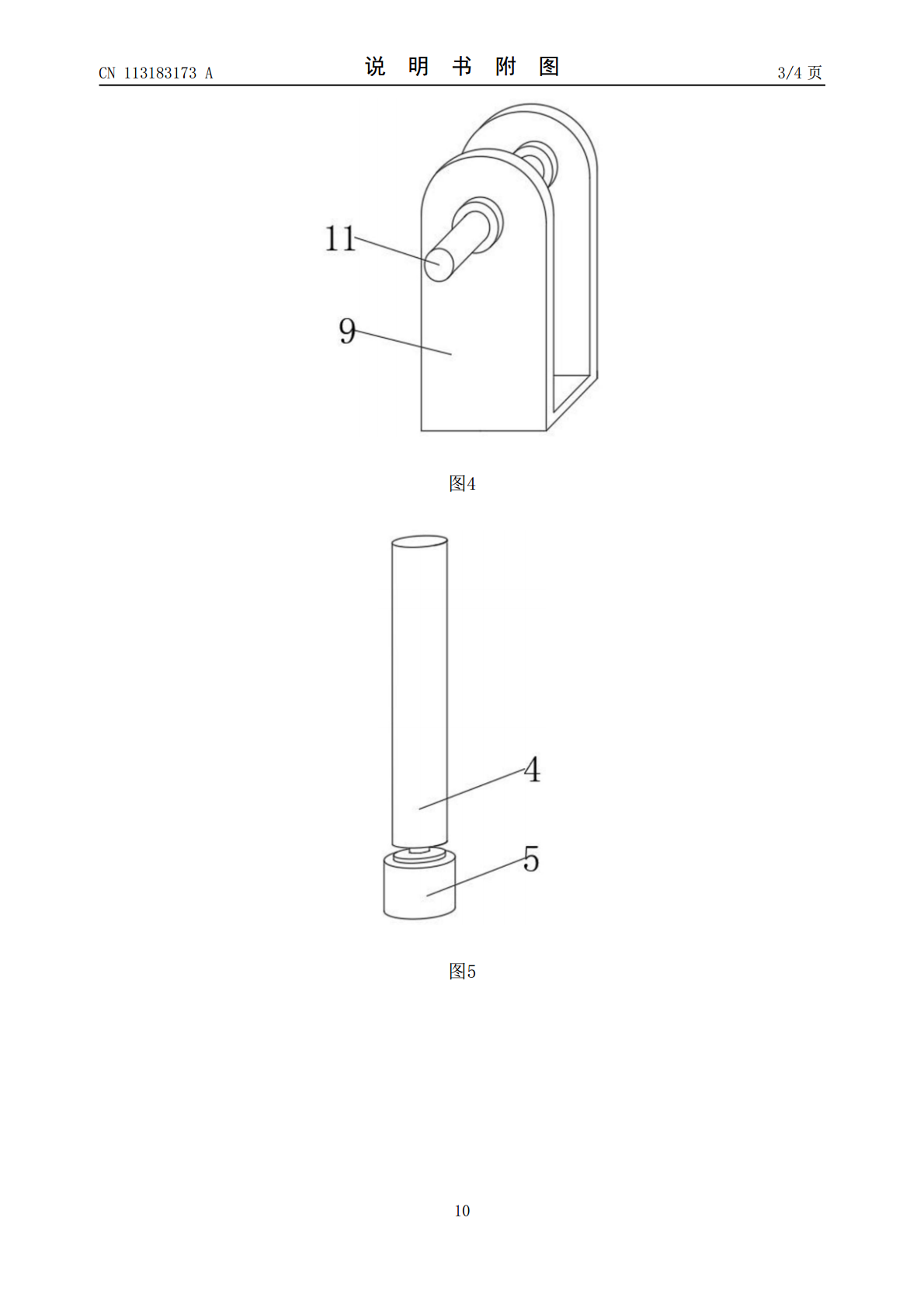
一种可以多角度夹取的机械机器人用机械臂.pdf
本发明公开了一种可以多角度夹取的机械机器人用机械臂,包括U型座,所述U型座内卡接有轴承一,且轴承一内套接有支撑杆一,且支撑杆一底部与电机一输出轴固定连接,且电机一通过电机座与U型座固定连接,且支撑杆一上侧固定连接有U型板一。本发明通过电动推杆一带动齿板一进行移动,齿板一通过与齿轮一和转轴一的配合可带动支撑杆二进行摆动,通过电动推杆二带动齿板二进行移动,通过齿板二、齿轮二以及转轴二的相互配合可带动固定板一、U型板二以及与U型板二相关联的结构就进行摆动,通过支撑杆二与固定板一的相互配合,可使该装置根据不同工作
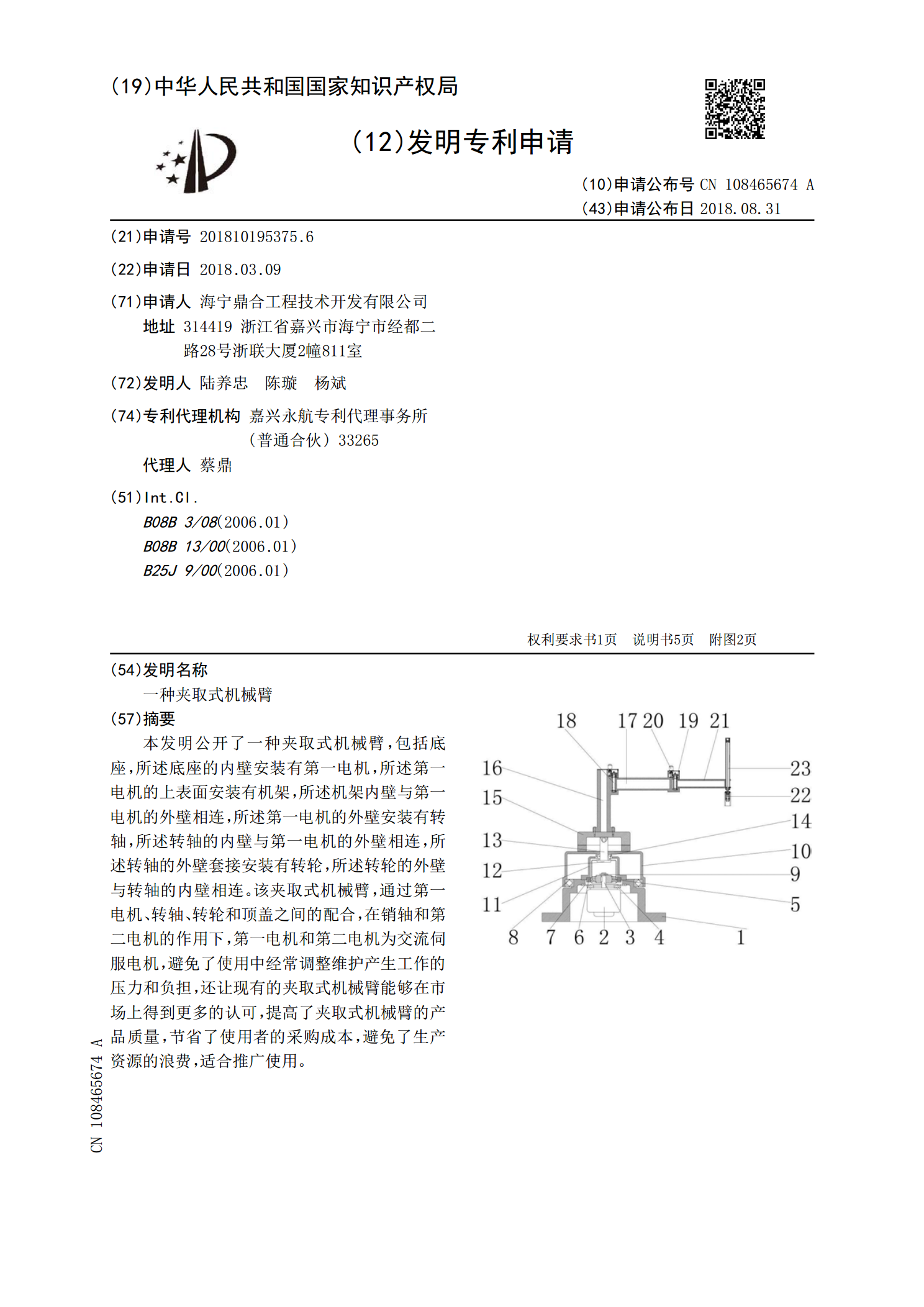
一种夹取式机械臂.pdf
本发明公开了一种夹取式机械臂,包括底座,所述底座的内壁安装有第一电机,所述第一电机的上表面安装有机架,所述机架内壁与第一电机的外壁相连,所述第一电机的外壁安装有转轴,所述转轴的内壁与第一电机的外壁相连,所述转轴的外壁套接安装有转轮,所述转轮的外壁与转轴的内壁相连。该夹取式机械臂,通过第一电机、转轴、转轮和顶盖之间的配合,在销轴和第二电机的作用下,第一电机和第二电机为交流伺服电机,避免了使用中经常调整维护产生工作的压力和负担,还让现有的夹取式机械臂能够在市场上得到更多的认可,提高了夹取式机械臂的产品质量,节

一种乳胶手套生产用夹取机械臂.pdf
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN116021697A(43)申请公布日2023.04.28(21)申请号202310292849.XB29C41/52(2006.01)(22)申请日2023.03.24B29L31/48(2006.01)(71)申请人北京瑞京乳胶制品有限公司地址101111北京市通州区台湖镇北神树村东光机电一体化产业基地兴光五街6号(72)发明人王会刘强贺飞苑建武刘海旺(74)专利代理机构深圳市广诺专利代理事务所(普通合伙)44611专利代理师梁继猛(51
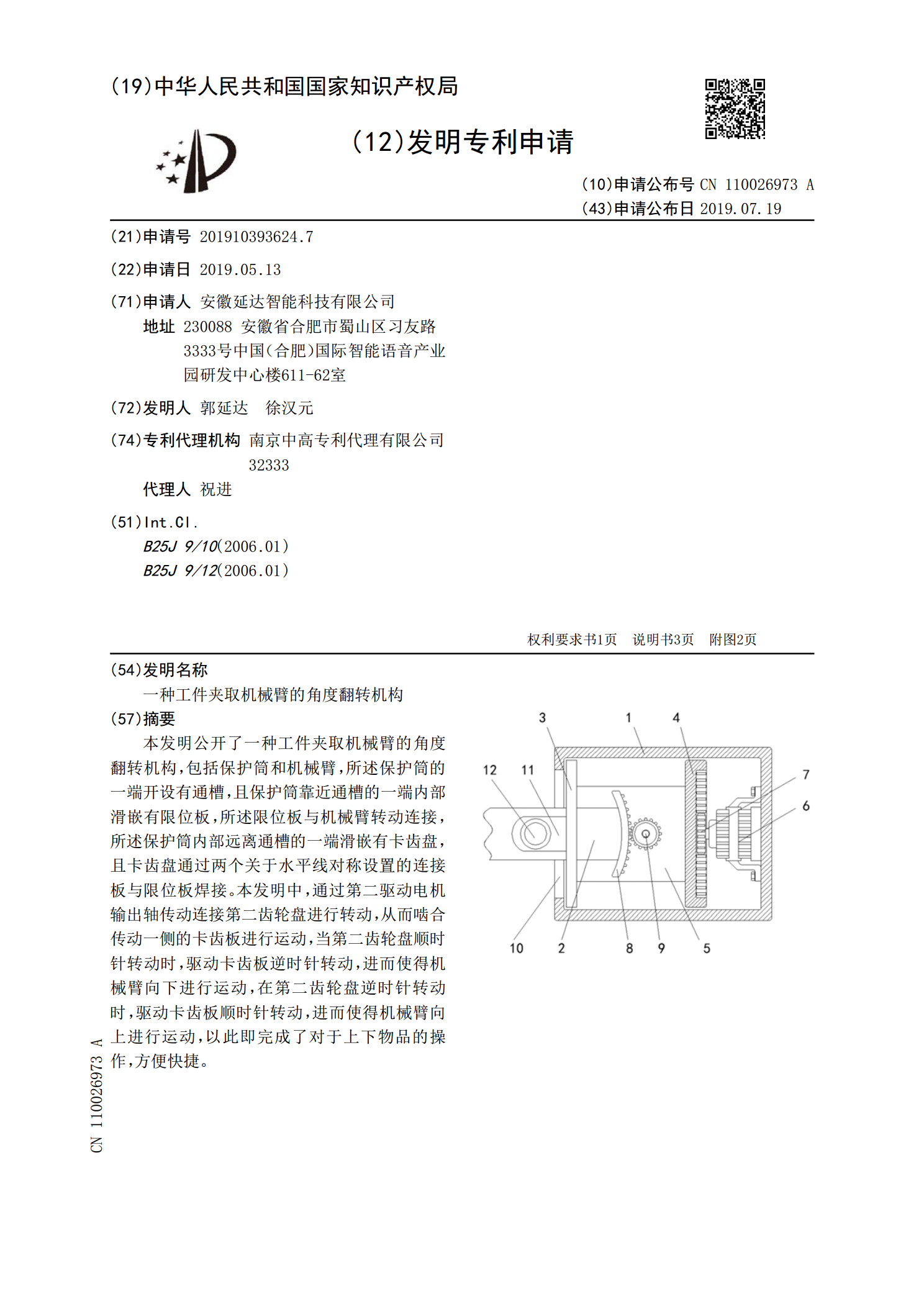
一种工件夹取机械臂的角度翻转机构.pdf
本发明公开了一种工件夹取机械臂的角度翻转机构,包括保护筒和机械臂,所述保护筒的一端开设有通槽,且保护筒靠近通槽的一端内部滑嵌有限位板,所述限位板与机械臂转动连接,所述保护筒内部远离通槽的一端滑嵌有卡齿盘,且卡齿盘通过两个关于水平线对称设置的连接板与限位板焊接。本发明中,通过第二驱动电机输出轴传动连接第二齿轮盘进行转动,从而啮合传动一侧的卡齿板进行运动,当第二齿轮盘顺时针转动时,驱动卡齿板逆时针转动,进而使得机械臂向下进行运动,在第二齿轮盘逆时针转动时,驱动卡齿板顺时针转动,进而使得机械臂向上进行运动,以此
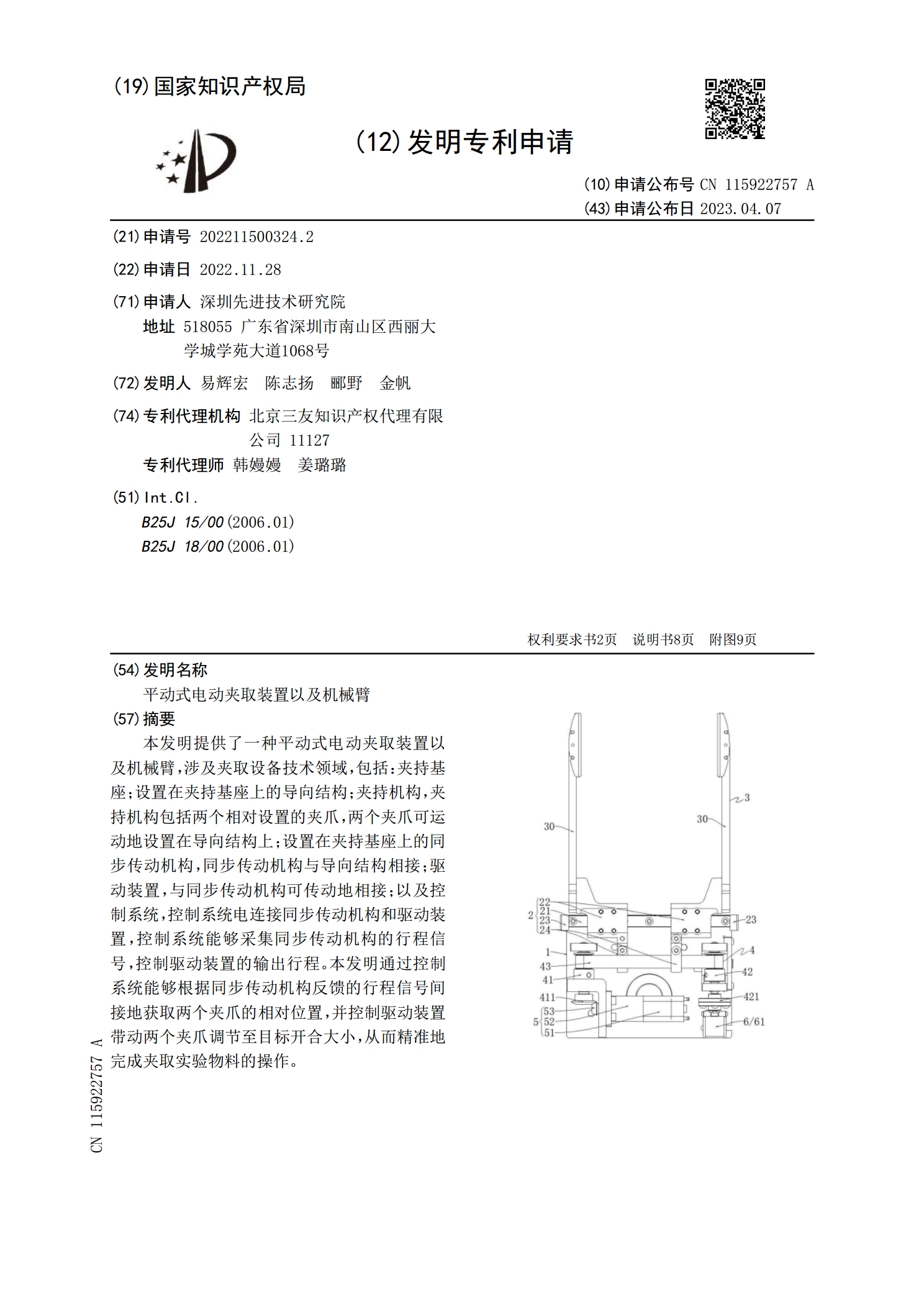
平动式电动夹取装置以及机械臂.pdf
本发明提供了一种平动式电动夹取装置以及机械臂,涉及夹取设备技术领域,包括:夹持基座;设置在夹持基座上的导向结构;夹持机构,夹持机构包括两个相对设置的夹爪,两个夹爪可运动地设置在导向结构上;设置在夹持基座上的同步传动机构,同步传动机构与导向结构相接;驱动装置,与同步传动机构可传动地相接;以及控制系统,控制系统电连接同步传动机构和驱动装置,控制系统能够采集同步传动机构的行程信号,控制驱动装置的输出行程。本发明通过控制系统能够根据同步传动机构反馈的行程信号间接地获取两个夹爪的相对位置,并控制驱动装置带动两个夹爪