
车辆载重监测方法、监测装置及控制系统.pdf

梅雪****67

1/10
2/10
3/10
4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆载重监测方法、监测装置及控制系统.pdf
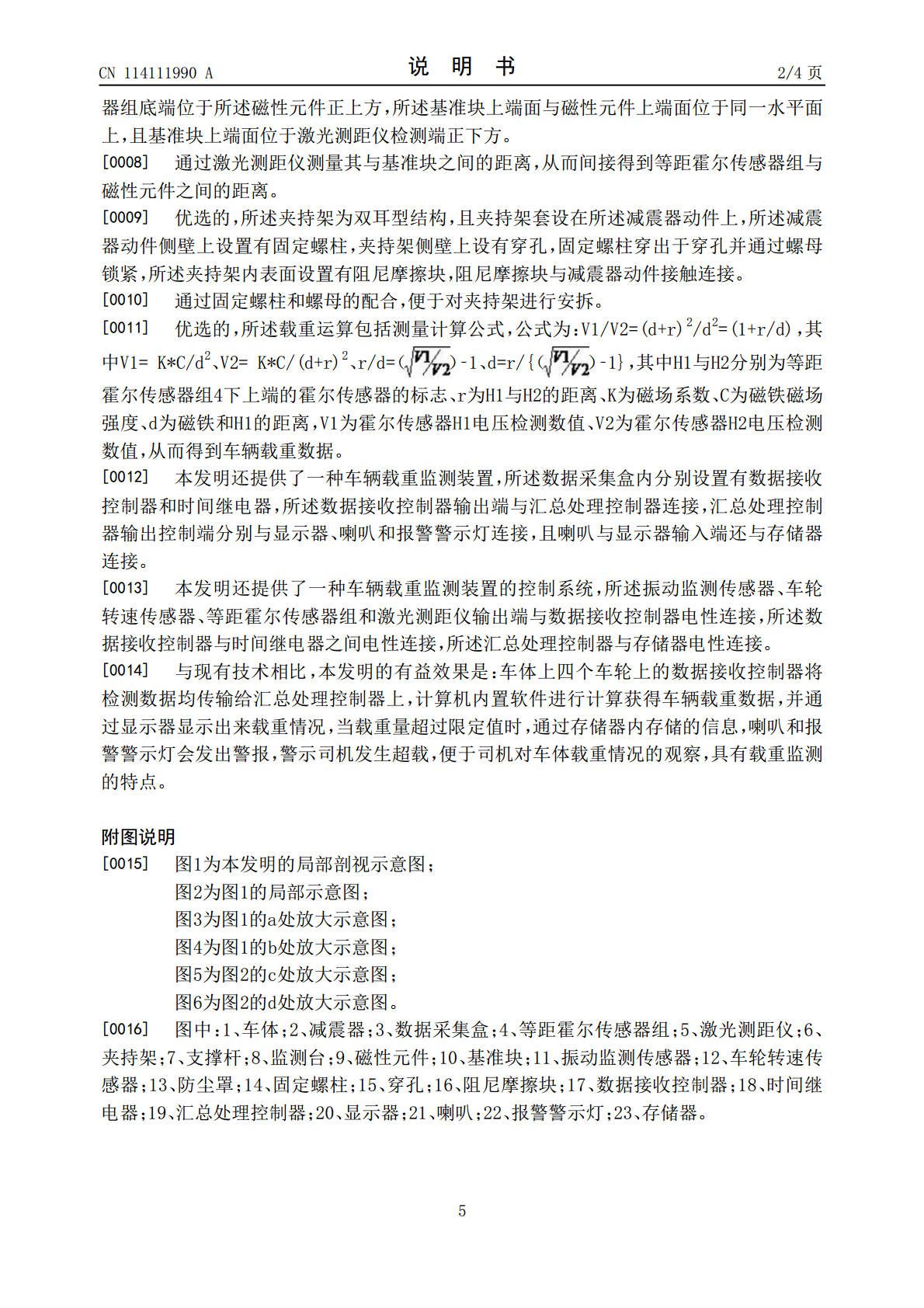
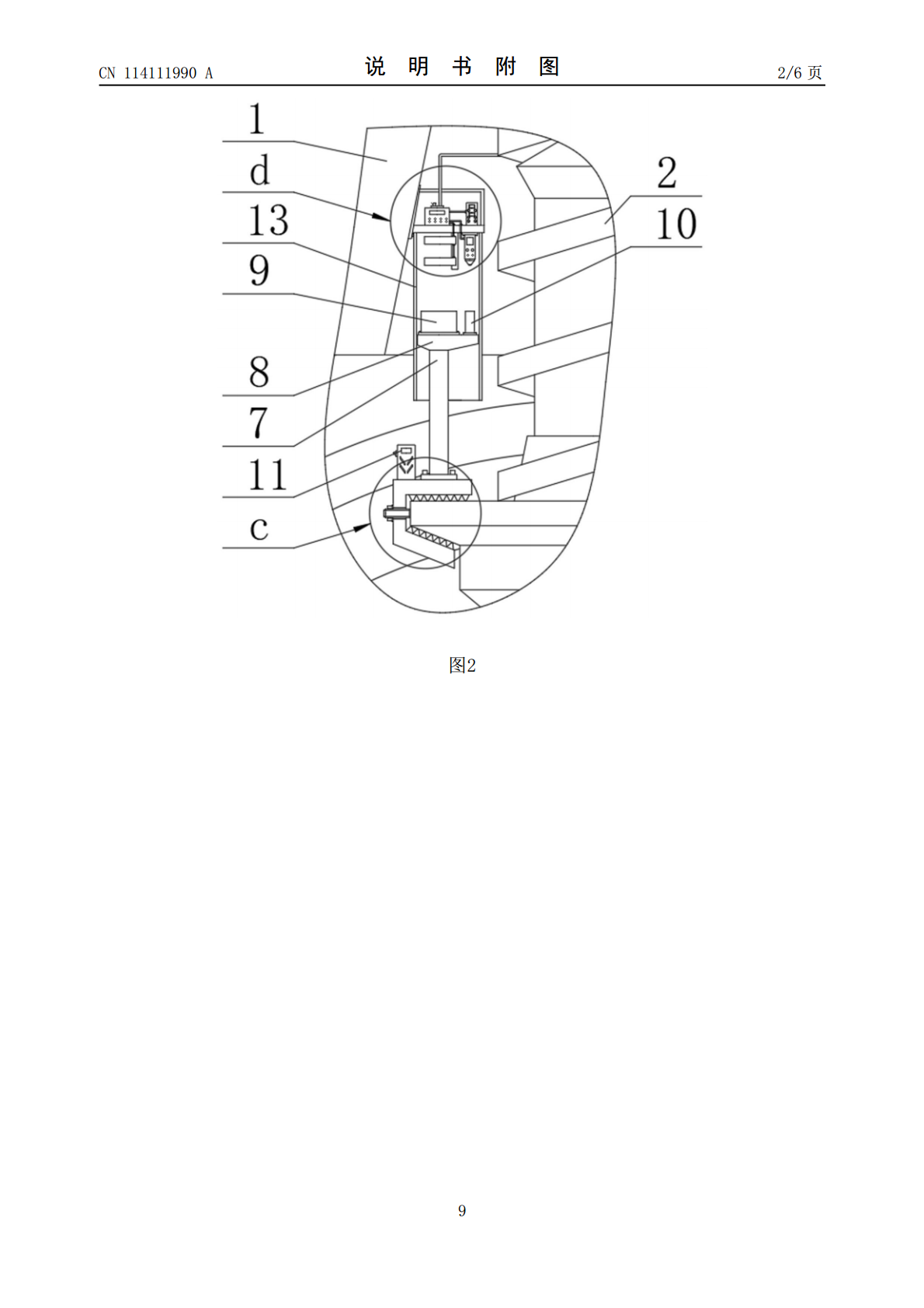
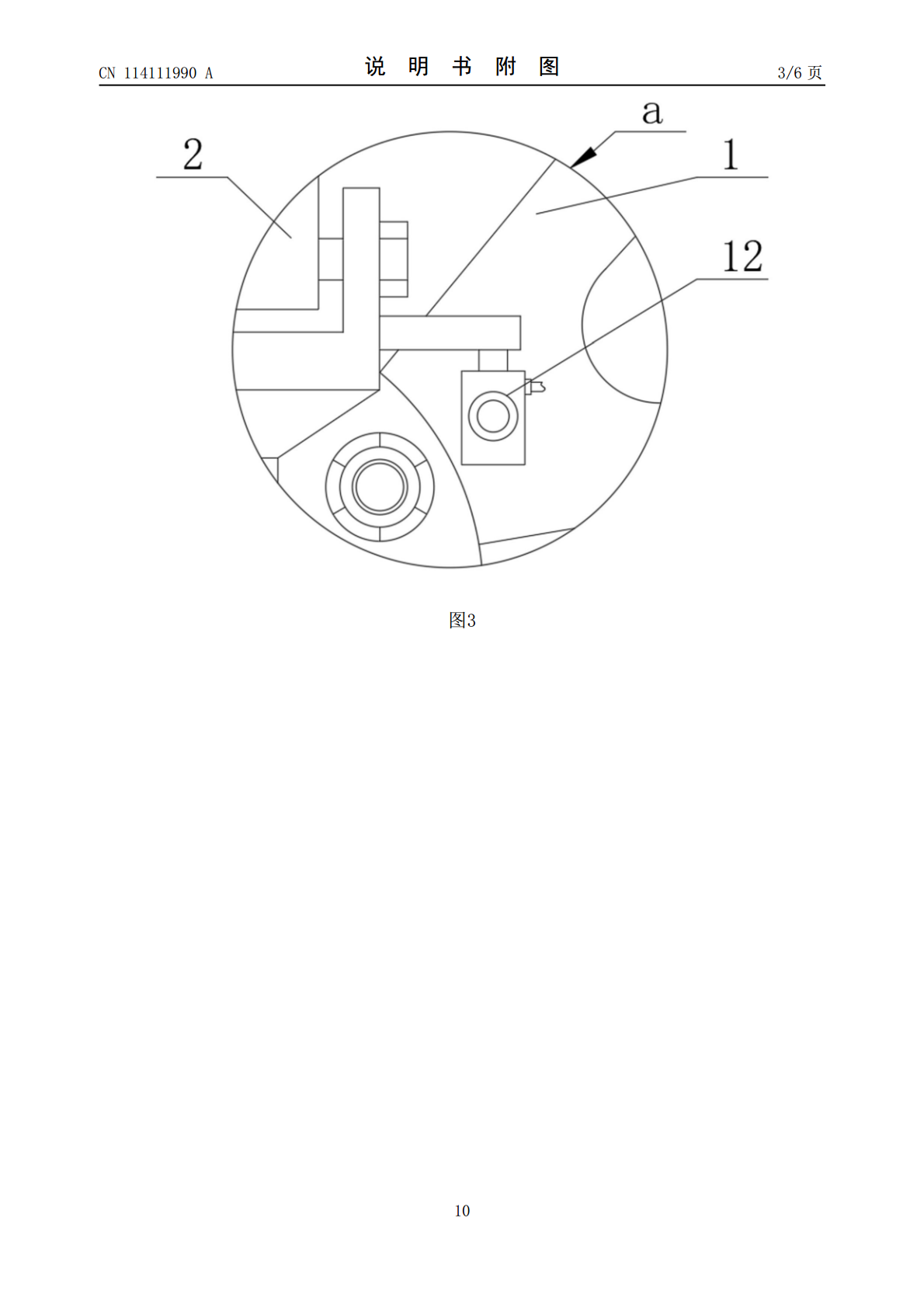
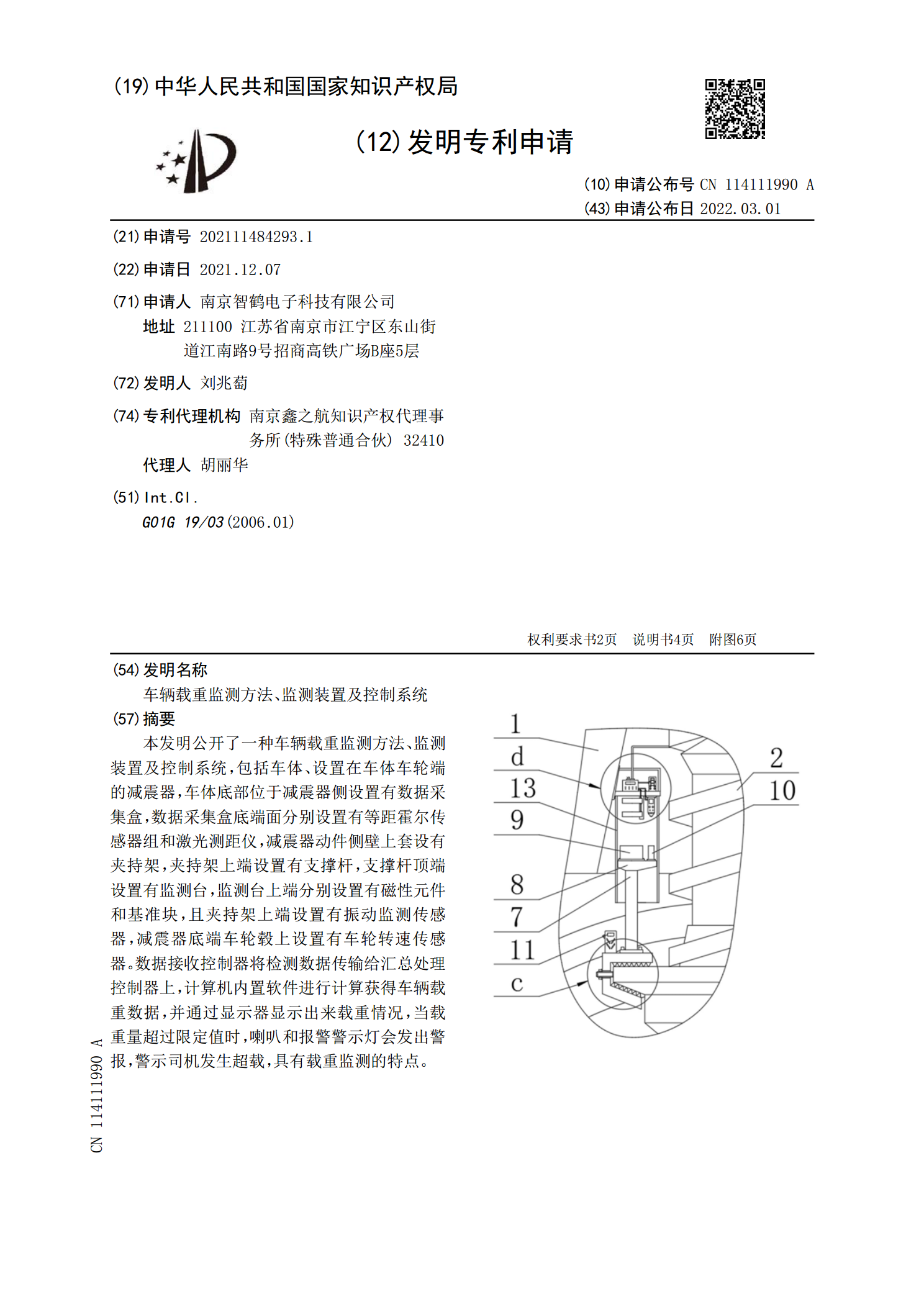
本发明公开了一种车辆载重监测方法、监测装置及控制系统,包括车体、设置在车体车轮端的减震器,车体底部位于减震器侧设置有数据采集盒,数据采集盒底端面分别设置有等距霍尔传感器组和激光测距仪,减震器动件侧壁上套设有夹持架,夹持架上端设置有支撑杆,支撑杆顶端设置有监测台,监测台上端分别设置有磁性元件和基准块,且夹持架上端设置有振动监测传感器,减震器底端车轮毂上设置有车轮转速传感器。数据接收控制器将检测数据传输给汇总处理控制器上,计算机内置软件进行计算获得车辆载重数据,并通过显示器显示出来载重情况,当载重量超过限定值
车辆载重监测方法及装置.pdf
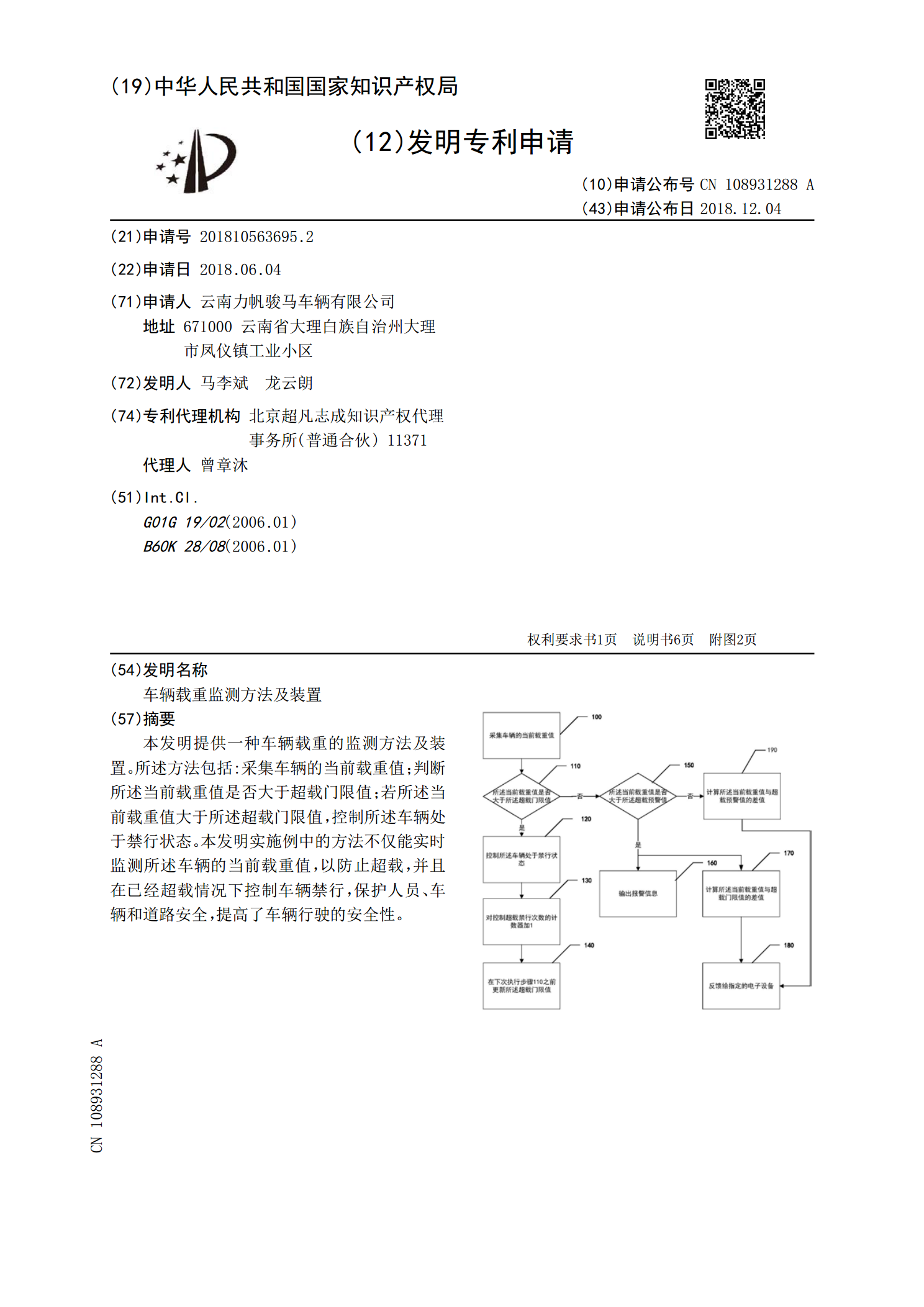
本发明提供一种车辆载重的监测方法及装置。所述方法包括:采集车辆的当前载重值;判断所述当前载重值是否大于超载门限值;若所述当前载重值大于所述超载门限值,控制所述车辆处于禁行状态。本发明实施例中的方法不仅能实时监测所述车辆的当前载重值,以防止超载,并且在已经超载情况下控制车辆禁行,保护人员、车辆和道路安全,提高了车辆行驶的安全性。

车辆碰撞监测系统、方法及装置.pdf
本发明提供一种车辆碰撞监测系统、方法及装置。所述系统包括:至少两个雷达、至少四个视频录制装置和处理器;至少两个雷达设于车辆的侧边,与处理器连接,且至少两个雷达的探测范围覆盖车辆四周,用于探测车辆四周的物体;至少四个视频录制装置设于车辆的侧边,与处理器连接,且至少四个视频录制装置的拍摄范围覆盖车辆四周,用于录制视频;处理器设于车辆内,用于根据雷达探测的数据确定是否进行视频录制。本发明实施例能够全方位覆盖车辆四周的拍摄区域,能够很好的记录侧方碰撞,能全方位监测车辆四周靠近的物体,当物体与车辆的距离小于预设值时

车辆盲区监测装置、方法及系统.pdf
本发明提供一种车辆盲区监测装置、方法及系统,所述车辆盲区监测装置包括:安装在车辆后部的超声波探测装置以及控制芯片,所述超声波探测装置用于发送超声波信号与接收回波信号,对车辆盲区进行测距;所述控制芯片连接所述超声波探测装置,用于接收所述回波信号,对所述回波信号进行分析得到进入车辆盲区的目标的运动轨迹;根据所述运动轨迹预测判断目标是否进入告警区域,并在进入时发送报警电信号。本发明实现了对车辆盲区的监测覆盖,并对盲区的监测目标进行提前预判,从而给驾驶员提供足够的反应时间,减少碰撞的风险,提高车辆行驶安全性。
油耗监测方法、油耗监测装置以及工程车辆.pdf
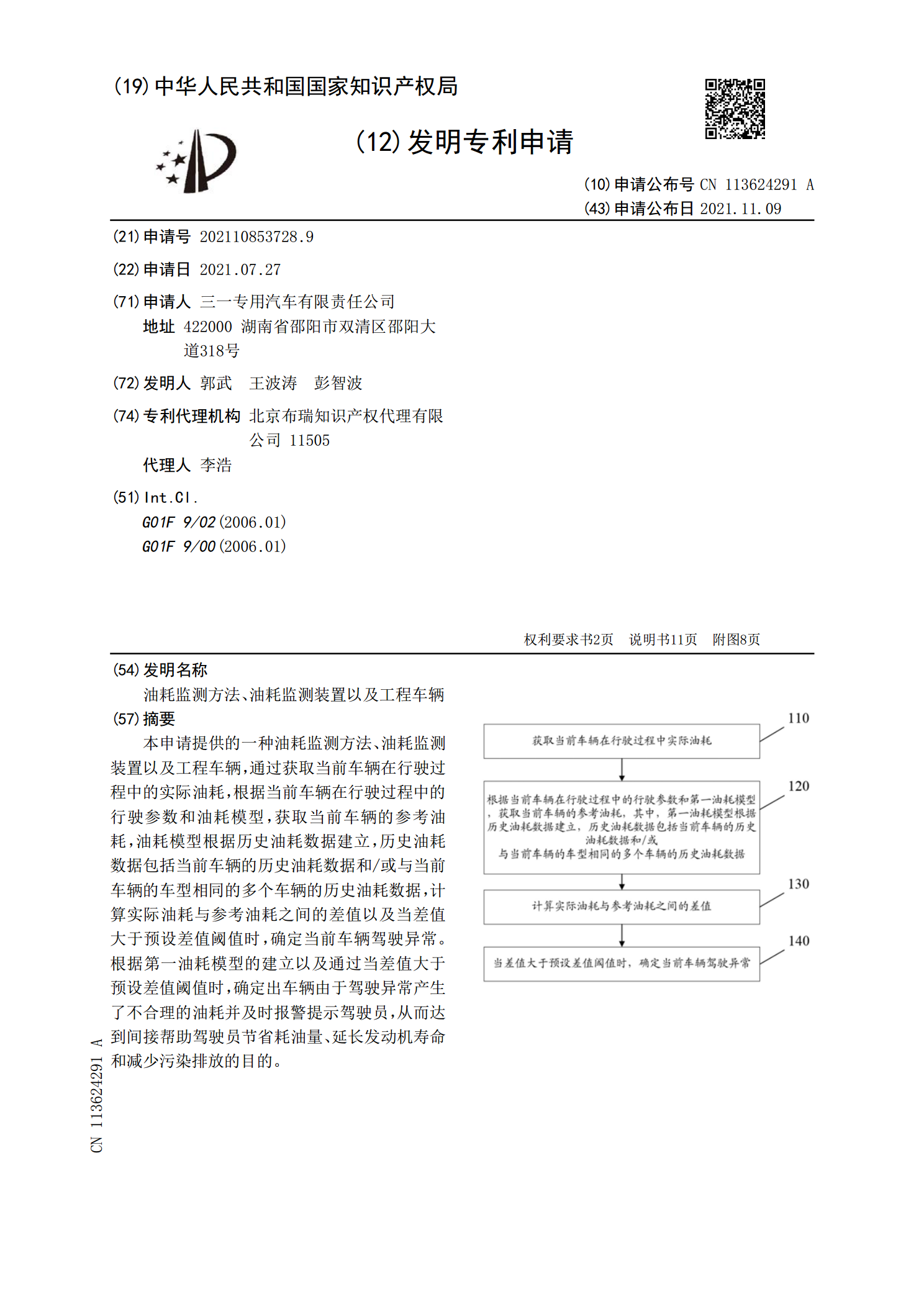
本申请提供的一种油耗监测方法、油耗监测装置以及工程车辆,通过获取当前车辆在行驶过程中的实际油耗,根据当前车辆在行驶过程中的行驶参数和油耗模型,获取当前车辆的参考油耗,油耗模型根据历史油耗数据建立,历史油耗数据包括当前车辆的历史油耗数据和/或与当前车辆的车型相同的多个车辆的历史油耗数据,计算实际油耗与参考油耗之间的差值以及当差值大于预设差值阈值时,确定当前车辆驾驶异常。根据第一油耗模型的建立以及通过当差值大于预设差值阈值时,确定出车辆由于驾驶异常产生了不合理的油耗并及时报警提示驾驶员,从而达到间接帮助驾驶员