
一种用于水下抓取棒料的机械手爪.pdf

宏硕****mo

1/8
2/8

3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于水下抓取棒料的机械手爪.pdf
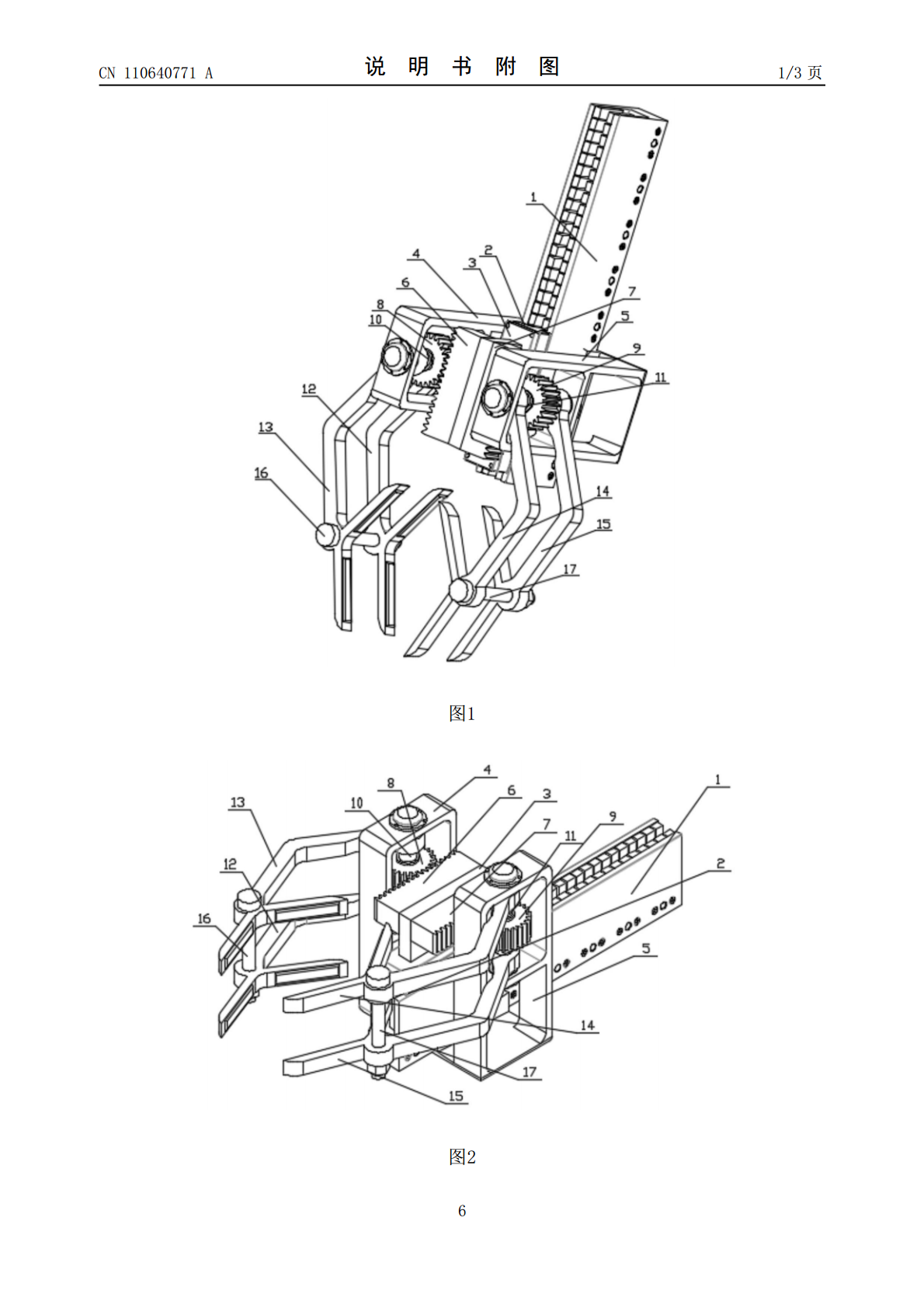
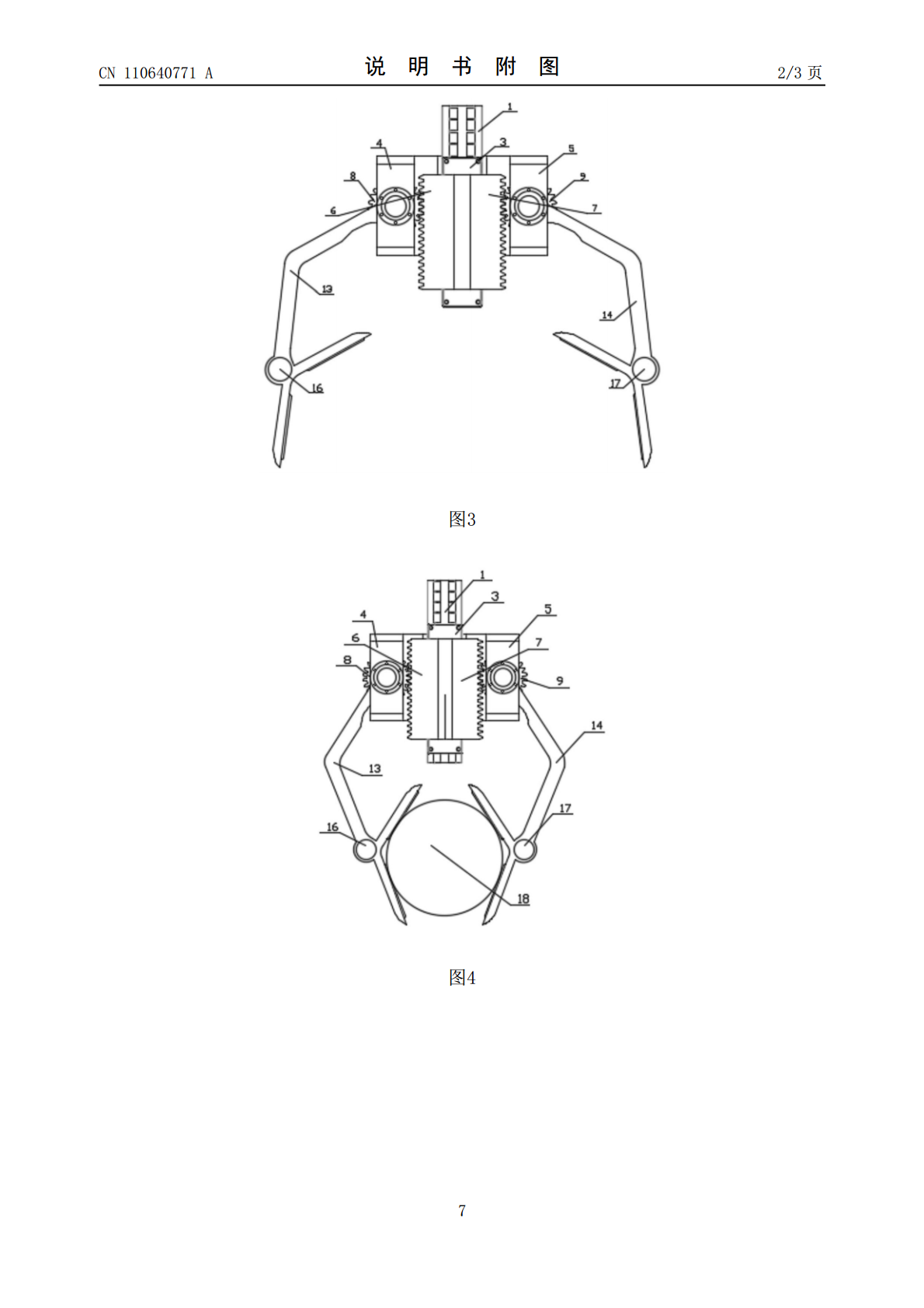
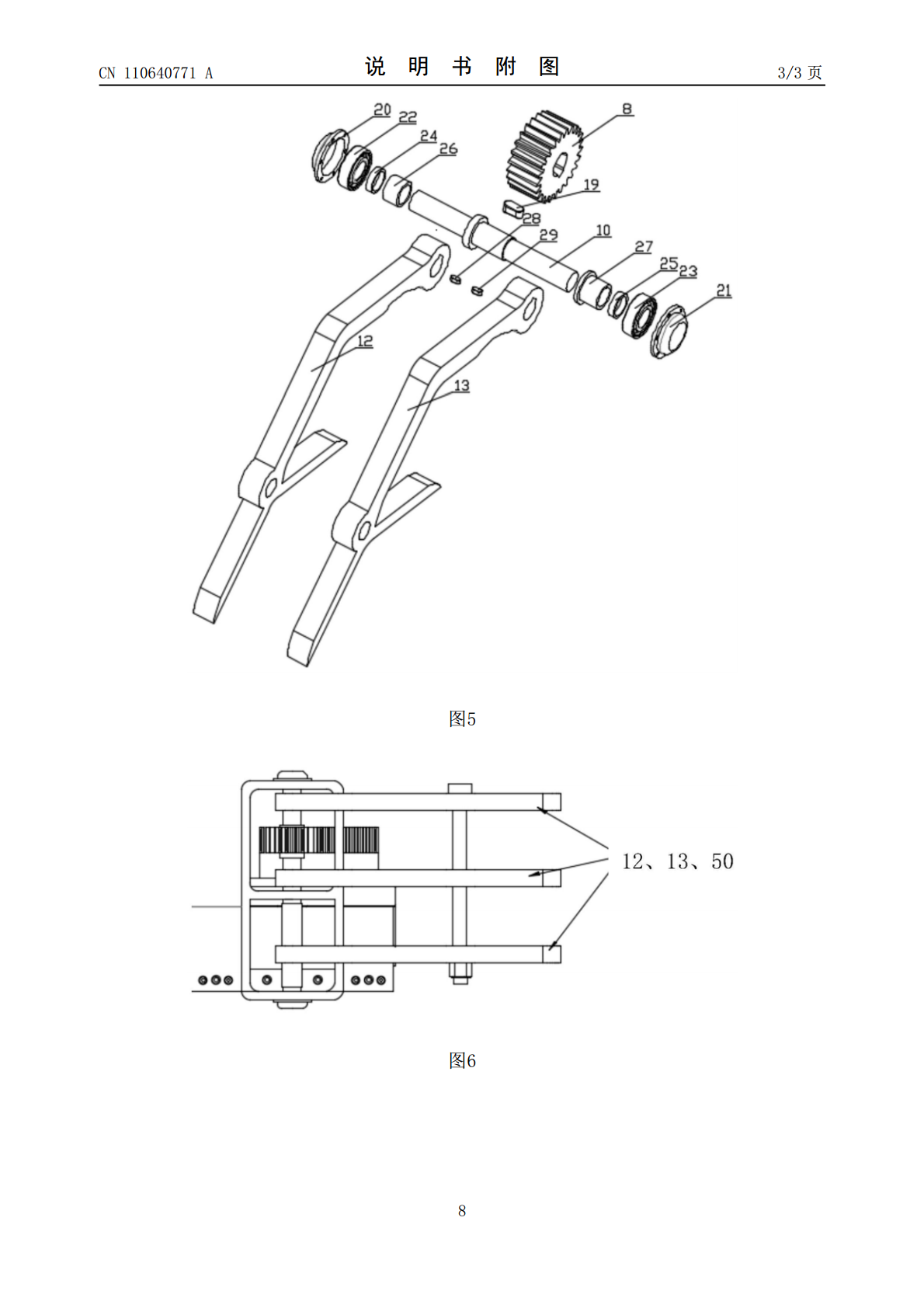
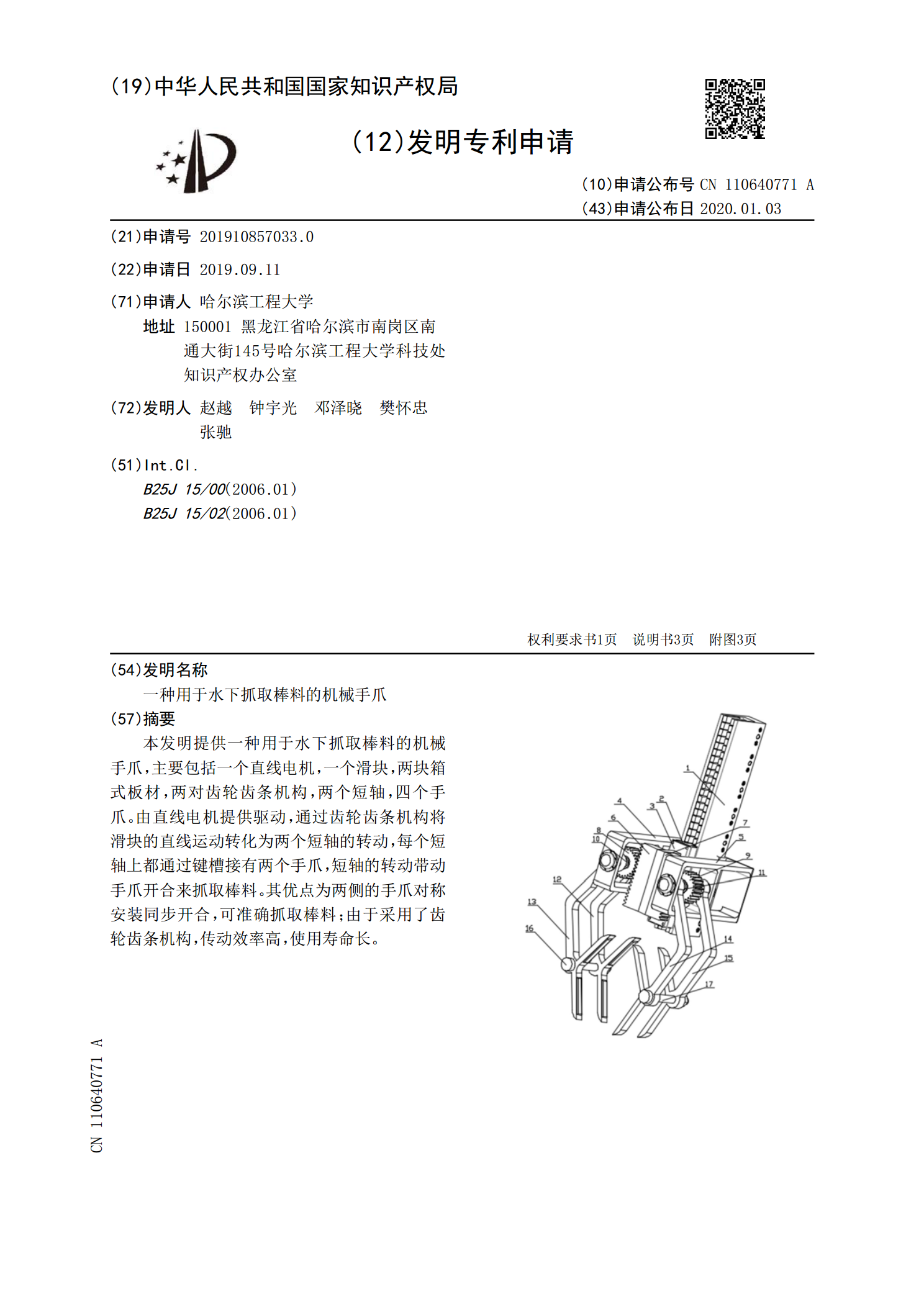
本发明提供一种用于水下抓取棒料的机械手爪,主要包括一个直线电机,一个滑块,两块箱式板材,两对齿轮齿条机构,两个短轴,四个手爪。由直线电机提供驱动,通过齿轮齿条机构将滑块的直线运动转化为两个短轴的转动,每个短轴上都通过键槽接有两个手爪,短轴的转动带动手爪开合来抓取棒料。其优点为两侧的手爪对称安装同步开合,可准确抓取棒料;由于采用了齿轮齿条机构,传动效率高,使用寿命长。
一种适用于复杂空间异物抓取的机械手爪结构.pdf
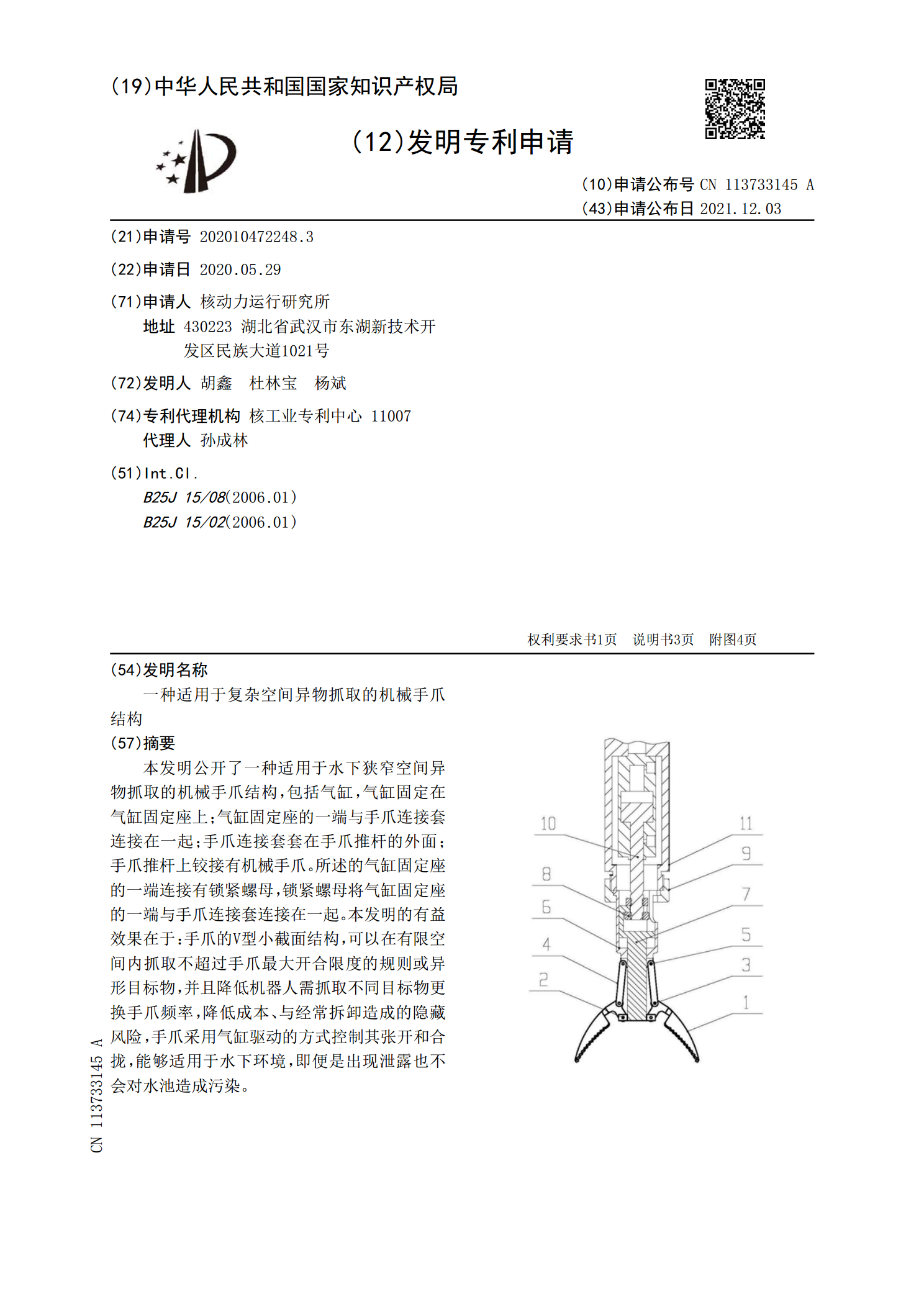
本发明公开了一种适用于水下狭窄空间异物抓取的机械手爪结构,包括气缸,气缸固定在气缸固定座上;气缸固定座的一端与手爪连接套连接在一起;手爪连接套套在手爪推杆的外面;手爪推杆上铰接有机械手爪。所述的气缸固定座的一端连接有锁紧螺母,锁紧螺母将气缸固定座的一端与手爪连接套连接在一起。本发明的有益效果在于:手爪的V型小截面结构,可以在有限空间内抓取不超过手爪最大开合限度的规则或异形目标物,并且降低机器人需抓取不同目标物更换手爪频率,降低成本、与经常拆卸造成的隐藏风险,手爪采用气缸驱动的方式控制其张开和合拢,能够适用
一种用于水下机器人的机械抓取装置.pdf
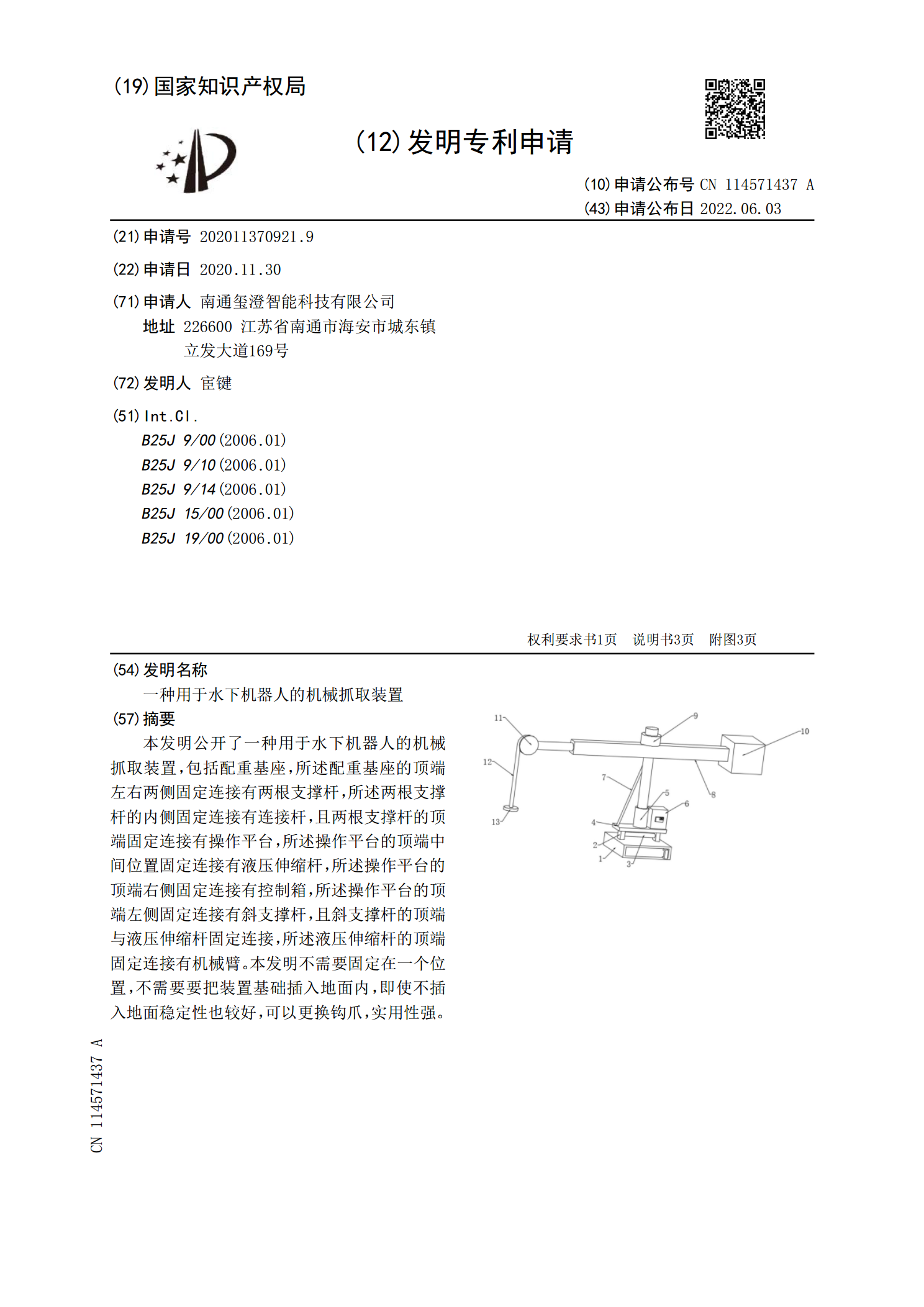
本发明公开了一种用于水下机器人的机械抓取装置,包括配重基座,所述配重基座的顶端左右两侧固定连接有两根支撑杆,所述两根支撑杆的内侧固定连接有连接杆,且两根支撑杆的顶端固定连接有操作平台,所述操作平台的顶端中间位置固定连接有液压伸缩杆,所述操作平台的顶端右侧固定连接有控制箱,所述操作平台的顶端左侧固定连接有斜支撑杆,且斜支撑杆的顶端与液压伸缩杆固定连接,所述液压伸缩杆的顶端固定连接有机械臂。本发明不需要固定在一个位置,不需要要把装置基础插入地面内,即使不插入地面稳定性也较好,可以更换钩爪,实用性强。
一种双位置抓取的手爪.pdf
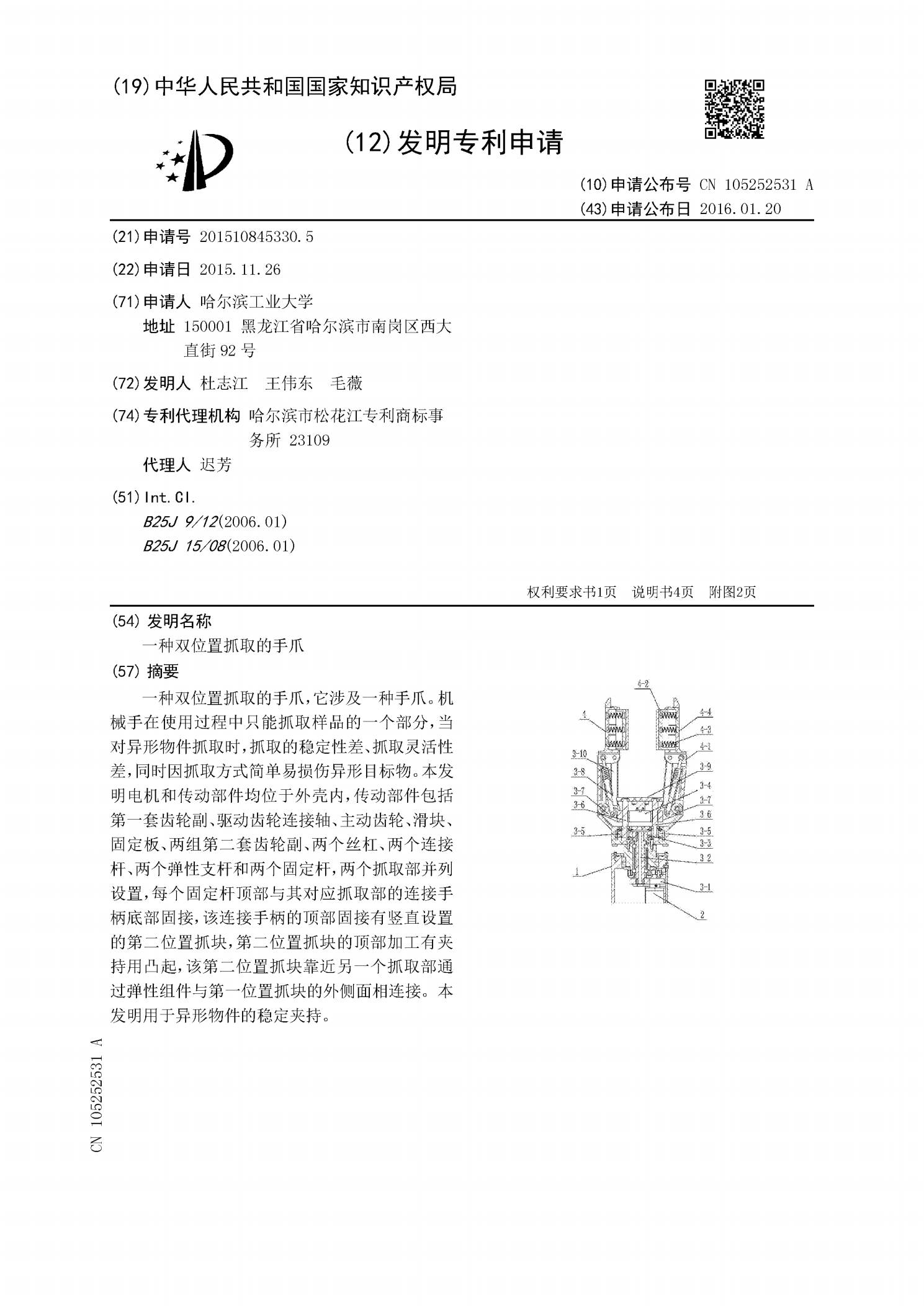
一种双位置抓取的手爪,它涉及一种手爪。机械手在使用过程中只能抓取样品的一个部分,当对异形物件抓取时,抓取的稳定性差、抓取灵活性差,同时因抓取方式简单易损伤异形目标物。本发明电机和传动部件均位于外壳内,传动部件包括第一套齿轮副、驱动齿轮连接轴、主动齿轮、滑块、固定板、两组第二套齿轮副、两个丝杠、两个连接杆、两个弹性支杆和两个固定杆,两个抓取部并列设置,每个固定杆顶部与其对应抓取部的连接手柄底部固接,该连接手柄的顶部固接有竖直设置的第二位置抓块,第二位置抓块的顶部加工有夹持用凸起,该第二位置抓块靠近另一个抓取
一种用于流水线上10kg重棒料搬运的机械人手爪.pdf
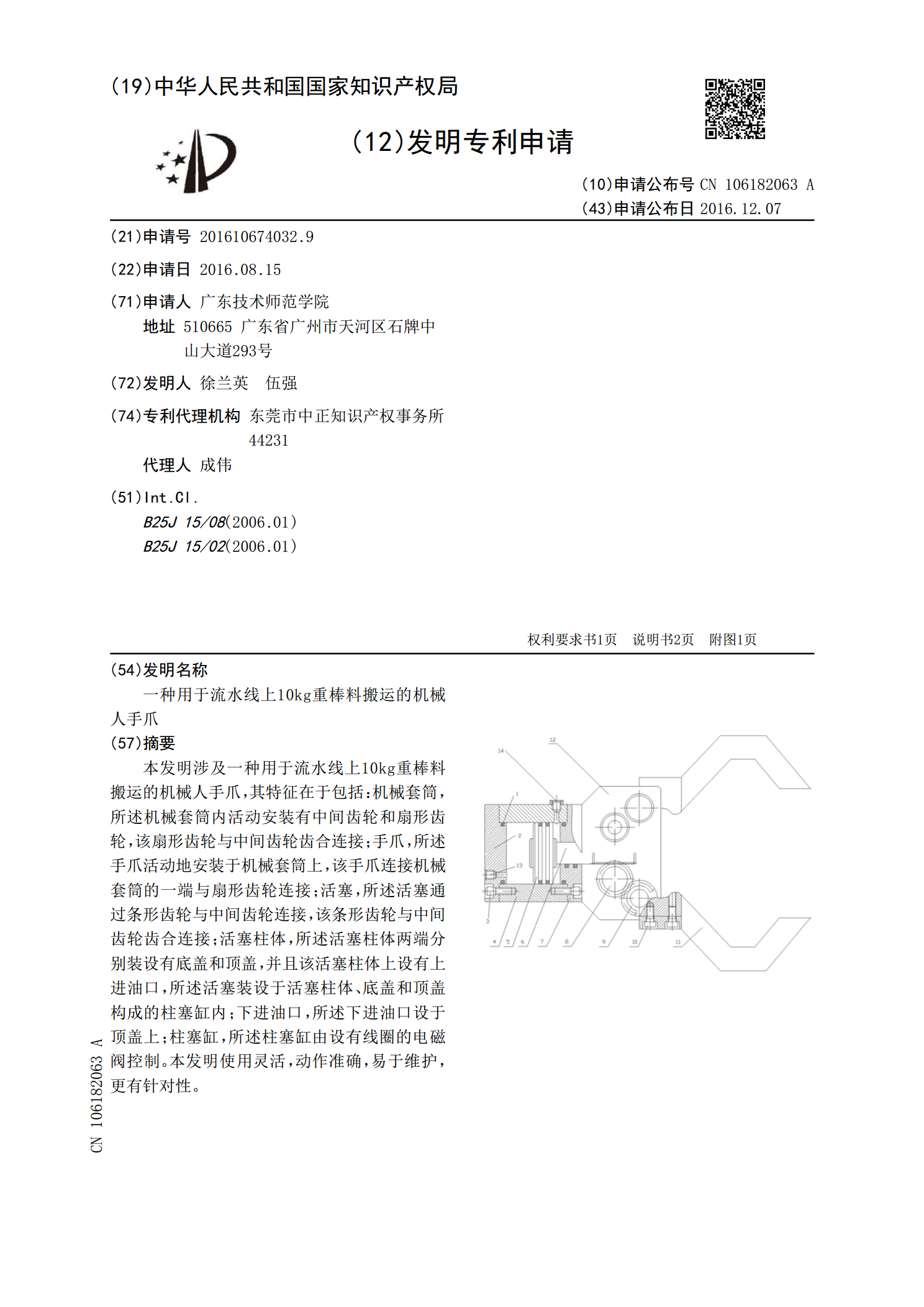
本发明涉及一种用于流水线上10kg重棒料搬运的机械人手爪,其特征在于包括:机械套筒,所述机械套筒内活动安装有中间齿轮和扇形齿轮,该扇形齿轮与中间齿轮齿合连接;手爪,所述手爪活动地安装于机械套筒上,该手爪连接机械套筒的一端与扇形齿轮连接;活塞,所述活塞通过条形齿轮与中间齿轮连接,该条形齿轮与中间齿轮齿合连接;活塞柱体,所述活塞柱体两端分别装设有底盖和顶盖,并且该活塞柱体上设有上进油口,所述活塞装设于活塞柱体、底盖和顶盖构成的柱塞缸内;下进油口,所述下进油口设于顶盖上;柱塞缸,所述柱塞缸由设有线圈的电磁阀控制