
足端装置及足式机器人.pdf

春岚****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

足端装置及足式机器人.pdf
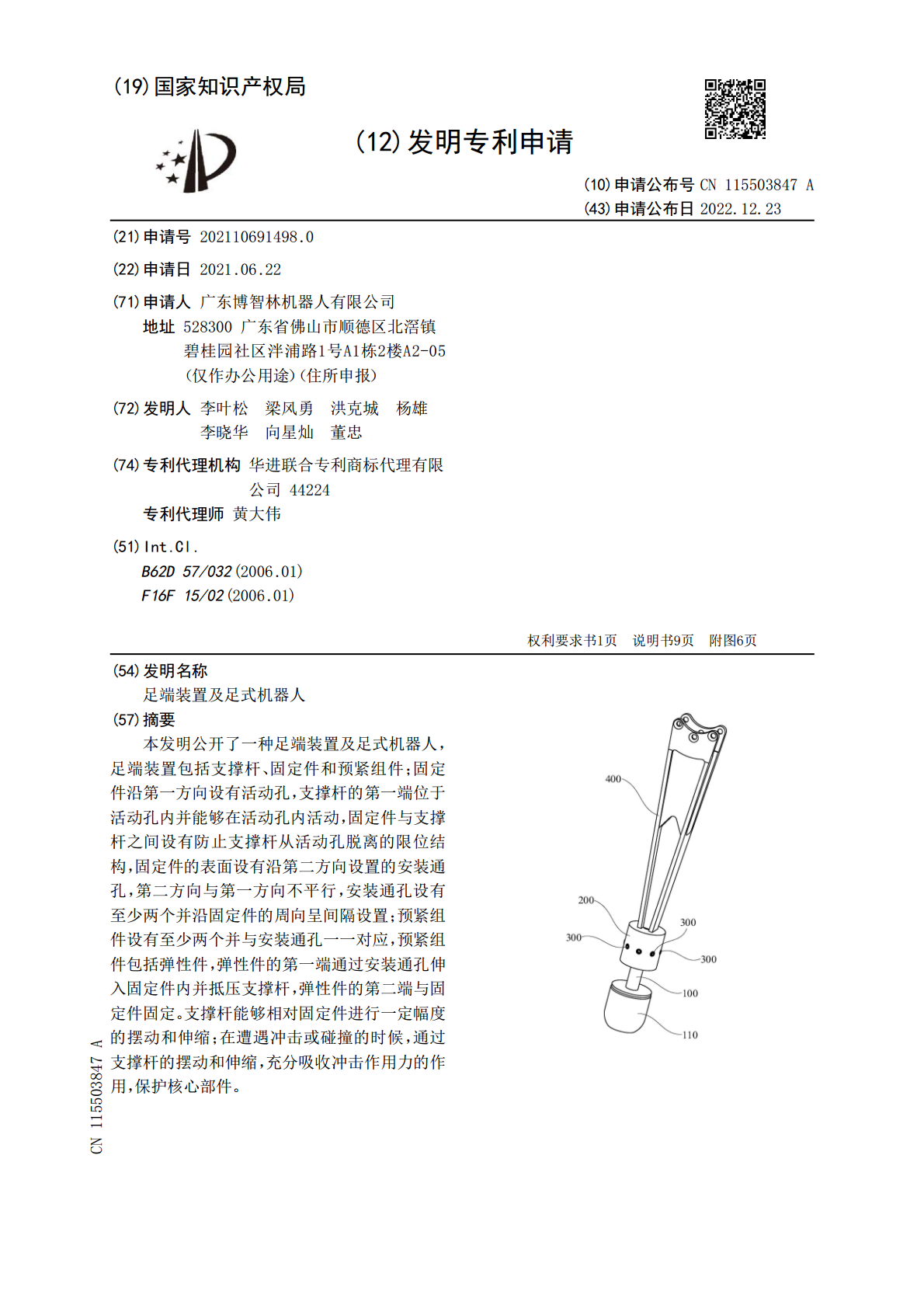
本发明公开了一种足端装置及足式机器人,足端装置包括支撑杆、固定件和预紧组件;固定件沿第一方向设有活动孔,支撑杆的第一端位于活动孔内并能够在活动孔内活动,固定件与支撑杆之间设有防止支撑杆从活动孔脱离的限位结构,固定件的表面设有沿第二方向设置的安装通孔,第二方向与第一方向不平行,安装通孔设有至少两个并沿固定件的周向呈间隔设置;预紧组件设有至少两个并与安装通孔一一对应,预紧组件包括弹性件,弹性件的第一端通过安装通孔伸入固定件内并抵压支撑杆,弹性件的第二端与固定件固定。支撑杆能够相对固定件进行一定幅度的摆动和伸缩

一种足式机器人的腿足弹性装置.pdf
本发明公开了一种足式机器人的腿足弹性装置,包括第一足板和第二足板,所述第一足板顶部的中心处固定连接有连接杆的下端,且第一足板的内部开设有内腔,并且内腔的内部放置有活动板,所述内腔的底部预留有通槽,且通槽的内部贯穿有连接板,并且连接板的顶部固定连接于活动板底部的中心处,所述连接板的底部固定连接有第二足板,且第二足板的底部设置有橡胶防滑块;本发明通过设置有第一弹簧、减震橡胶、第二弹簧和第三弹簧,保证了机器人在行走时,具有四重缓冲的效果,从而对机器人内部的精密零件起到了良好的保护作用,延长了机器人的使用寿命。

四足机器人圆形足端球面矢量力检测装置及检测方法.pdf
本发明涉及四足机器人技术领域,特别涉及一种四足机器人圆形足端球面矢量力检测装置及检测方法。检测装置包括腿部连杆,其内侧设置有通槽;腿部连杆末端设置有球形支撑体,表面布置着压力传感器,且压力传感器成球面经纬线布置;球形支撑体的外部设置有塑胶足套,塑胶足套的内壁设置有均匀分布的凸起,腿部连杆内设置有信号线通孔。本发明提供的检测方法,通过球面矩阵分布的压力传感器能得到崎岖不平路面对圆形足端的作用力情况,检测多支撑点的压力大小和方向,再通过矢量力合成计算得到四足机器人足底的矢量力,从完成足底矢量力检测。本发明提供

四足机器人棘轮足装置.pdf
本发明公布了一种四足机器人棘轮足装置,所述棘轮足装置安装在四足机器人腿部,所述棘轮足装置包括足部托盘、连接平板、大空心销轴、小空心销轴、棘轮和棘轮垫块,足部托盘与四足机器人小腿连接,连接平板通过螺钉与足部托盘固连,通过螺钉将棘轮和棘轮垫块固定在连接平板上,再通过大空心销轴和小空心销轴固定棘轮和棘轮垫块使两者不发生相对滑移。基于独特的棘轮的设计,可以使四足机器人在与地面接触时产生良好的摩擦力和抓地力。本发明四足机器人棘轮足装置,具有结构简单,重量轻,拆装方便,抓地力强,运动能力突出等特点。
轮足式结构及轮足式机器人.pdf
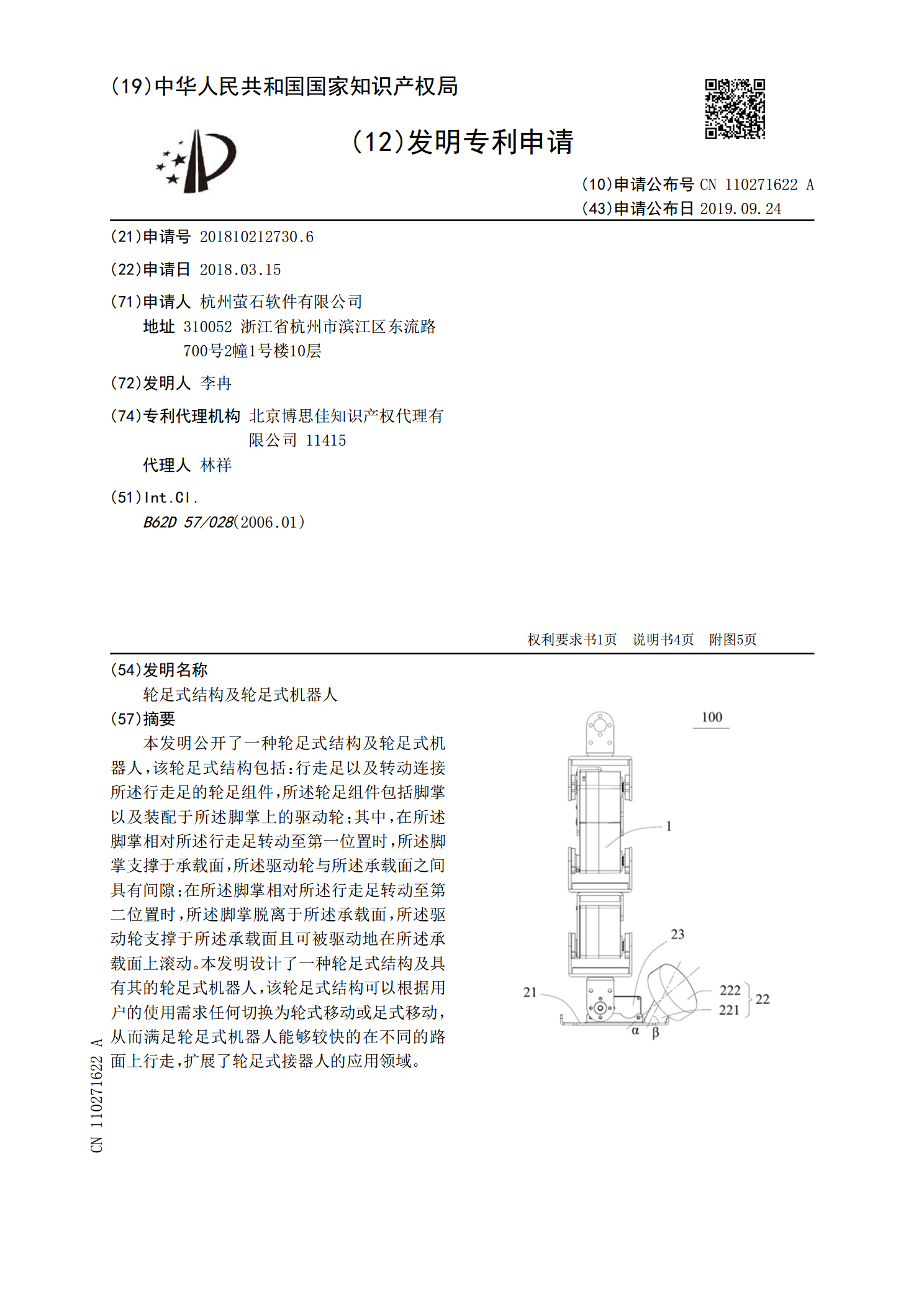
本发明公开了一种轮足式结构及轮足式机器人,该轮足式结构包括:行走足以及转动连接所述行走足的轮足组件,所述轮足组件包括脚掌以及装配于所述脚掌上的驱动轮;其中,在所述脚掌相对所述行走足转动至第一位置时,所述脚掌支撑于承载面,所述驱动轮与所述承载面之间具有间隙;在所述脚掌相对所述行走足转动至第二位置时,所述脚掌脱离于所述承载面,所述驱动轮支撑于所述承载面且可被驱动地在所述承载面上滚动。本发明设计了一种轮足式结构及具有其的轮足式机器人,该轮足式结构可以根据用户的使用需求任何切换为轮式移动或足式移动,从而满足轮足式