
四足机器人圆形足端球面矢量力检测装置及检测方法.pdf

是湛****21

1/10
2/10
3/10

4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

四足机器人圆形足端球面矢量力检测装置及检测方法.pdf
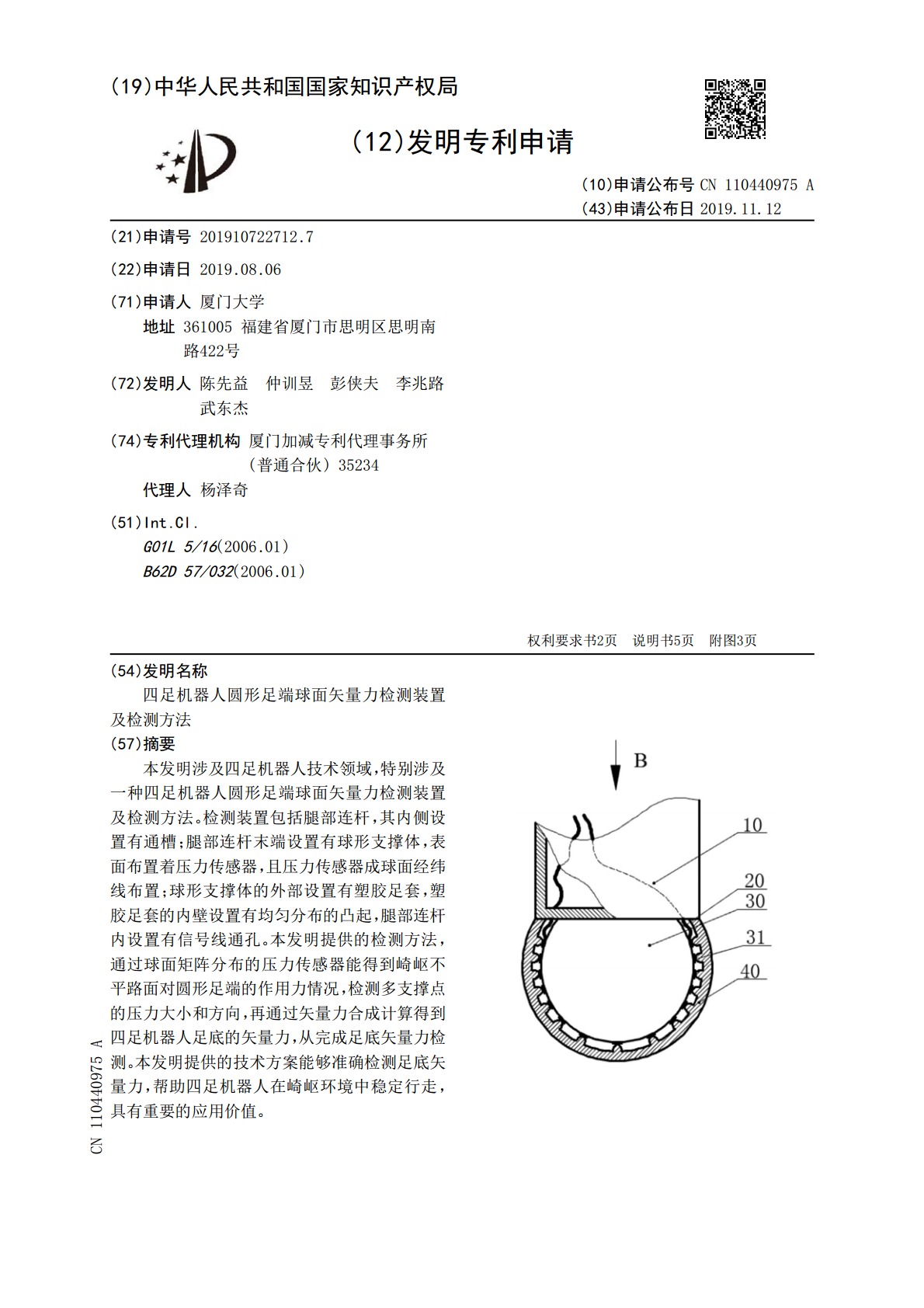
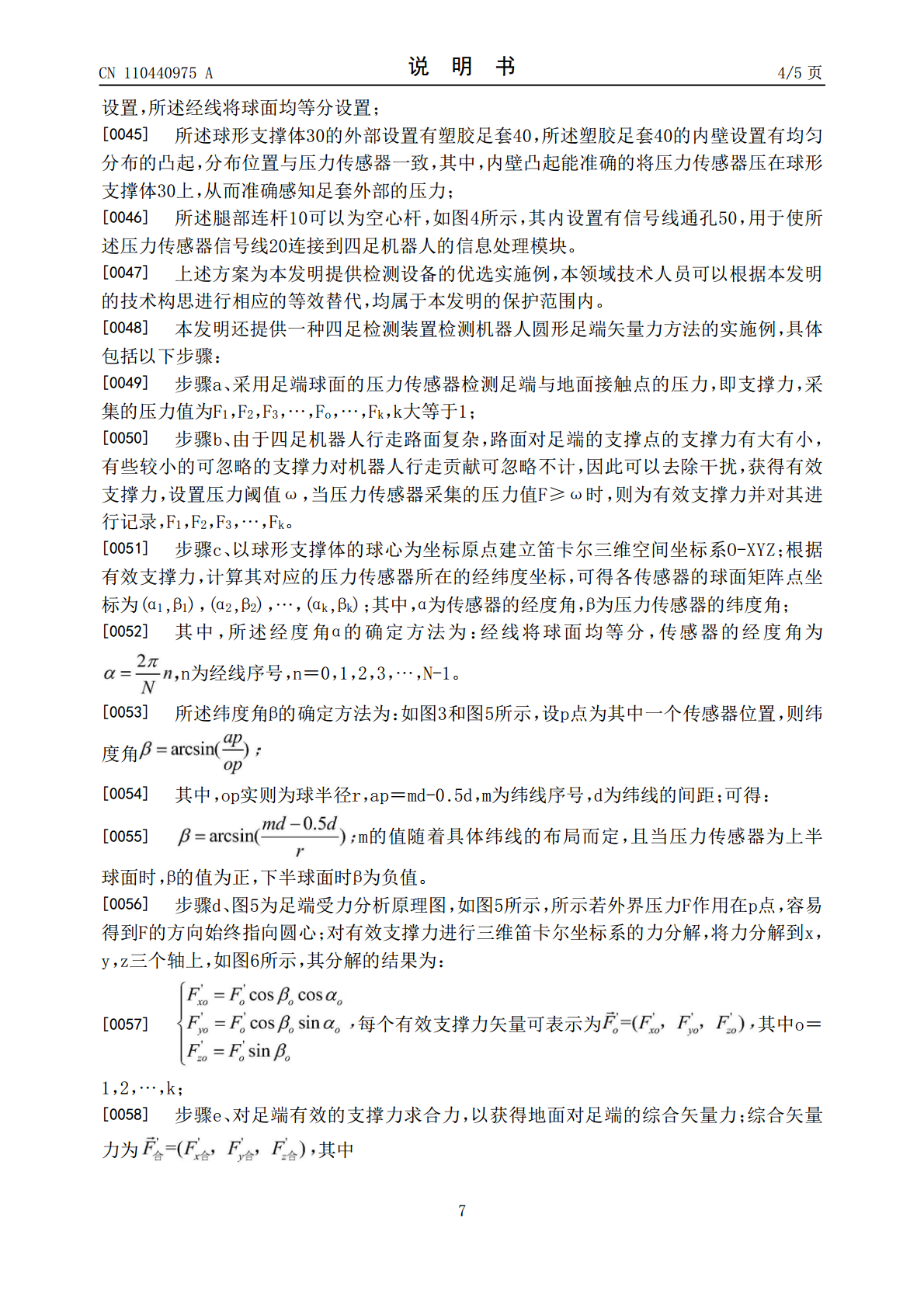
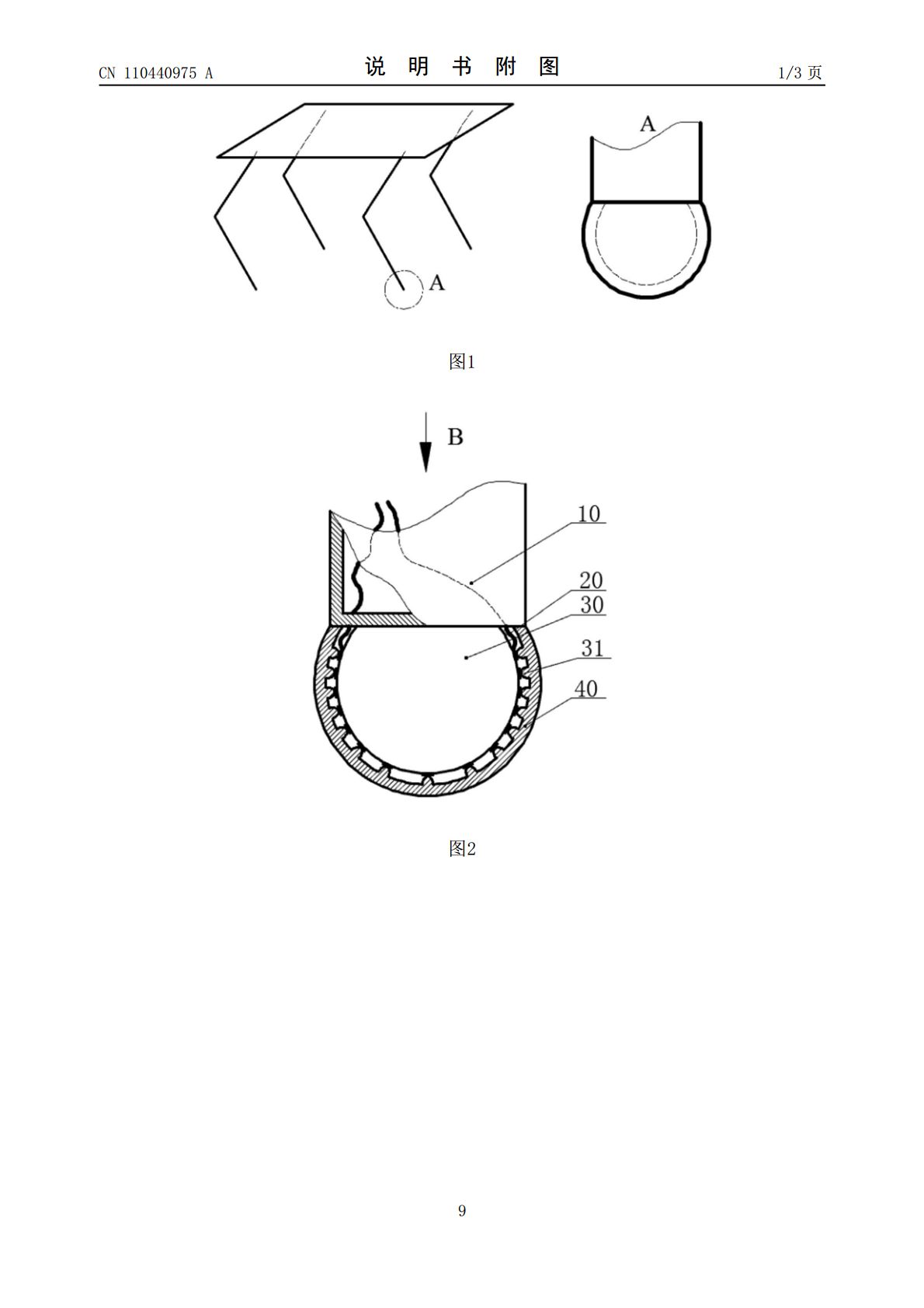
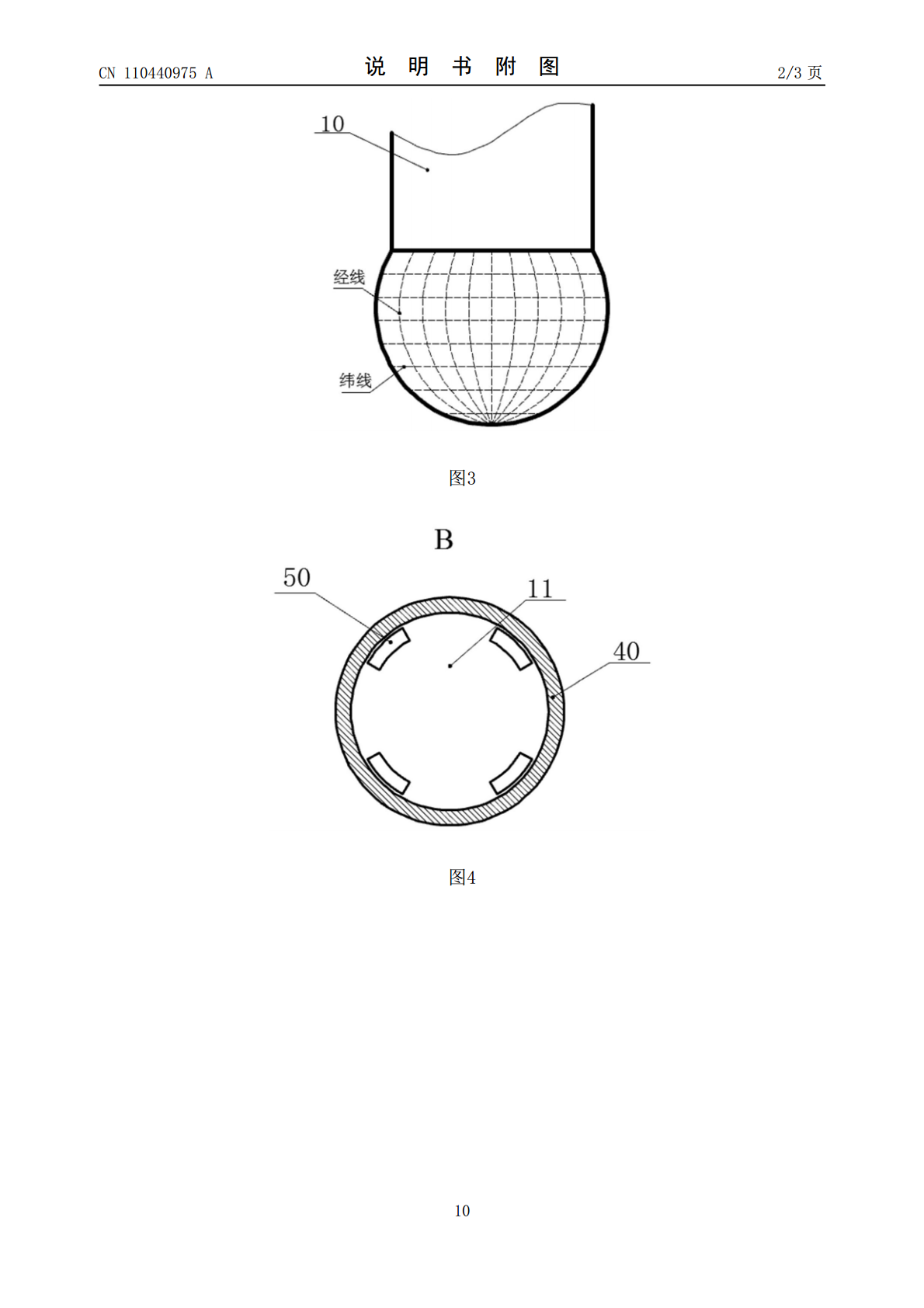
本发明涉及四足机器人技术领域,特别涉及一种四足机器人圆形足端球面矢量力检测装置及检测方法。检测装置包括腿部连杆,其内侧设置有通槽;腿部连杆末端设置有球形支撑体,表面布置着压力传感器,且压力传感器成球面经纬线布置;球形支撑体的外部设置有塑胶足套,塑胶足套的内壁设置有均匀分布的凸起,腿部连杆内设置有信号线通孔。本发明提供的检测方法,通过球面矩阵分布的压力传感器能得到崎岖不平路面对圆形足端的作用力情况,检测多支撑点的压力大小和方向,再通过矢量力合成计算得到四足机器人足底的矢量力,从完成足底矢量力检测。本发明提供

足端装置及足式机器人.pdf
本发明公开了一种足端装置及足式机器人,足端装置包括支撑杆、固定件和预紧组件;固定件沿第一方向设有活动孔,支撑杆的第一端位于活动孔内并能够在活动孔内活动,固定件与支撑杆之间设有防止支撑杆从活动孔脱离的限位结构,固定件的表面设有沿第二方向设置的安装通孔,第二方向与第一方向不平行,安装通孔设有至少两个并沿固定件的周向呈间隔设置;预紧组件设有至少两个并与安装通孔一一对应,预紧组件包括弹性件,弹性件的第一端通过安装通孔伸入固定件内并抵压支撑杆,弹性件的第二端与固定件固定。支撑杆能够相对固定件进行一定幅度的摆动和伸缩
一种规划四足机器人足端摆动轨迹的方法.pdf
本发明涉及一种规划四足机器人足端摆动轨迹的方法,其包括:根据足端的摆动跨度和摆动相的持续时间,设计足端摆动过程中的曲线端点状态参数;拟合足端摆动轨迹。本发明提供的足端摆动轨迹规划方法,在抬腿阶段具有向后向上的运动趋势有效实现避障功能;在迈腿方向具有向前向上的运动趋势,可以很好的实现越障功能;而且足端摆动轨迹参数可以实时调整,能够灵活适应地形,提高了四足机器人在复杂崎岖地形上的通过能力。

四足机器人棘轮足装置.pdf
本发明公布了一种四足机器人棘轮足装置,所述棘轮足装置安装在四足机器人腿部,所述棘轮足装置包括足部托盘、连接平板、大空心销轴、小空心销轴、棘轮和棘轮垫块,足部托盘与四足机器人小腿连接,连接平板通过螺钉与足部托盘固连,通过螺钉将棘轮和棘轮垫块固定在连接平板上,再通过大空心销轴和小空心销轴固定棘轮和棘轮垫块使两者不发生相对滑移。基于独特的棘轮的设计,可以使四足机器人在与地面接触时产生良好的摩擦力和抓地力。本发明四足机器人棘轮足装置,具有结构简单,重量轻,拆装方便,抓地力强,运动能力突出等特点。

四足机器人足端运动空间分析与轨迹规划.docx
四足机器人足端运动空间分析与轨迹规划四足机器人足端运动空间分析与轨迹规划摘要:四足机器人是一种具有广泛应用前景的机器人系统,其足端运动空间的分析和轨迹规划是实现该系统运动控制的关键问题。本文综述了四足机器人足端运动空间的分析方法和轨迹规划算法,并探讨了其存在的一些挑战和发展趋势。关键词:四足机器人,足端运动空间,轨迹规划,分析方法,挑战与发展1.引言四足机器人是一类仿生机器人,其构造模仿了生物动物的四肢结构,拥有优秀的行走和移动能力。为了实现四足机器人的运动控制,需要对其足端运动空间进行分析和轨迹规划。足