
四足机器人棘轮足装置.pdf

一只****呀盟


1/7
2/7
3/7
4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

四足机器人棘轮足装置.pdf
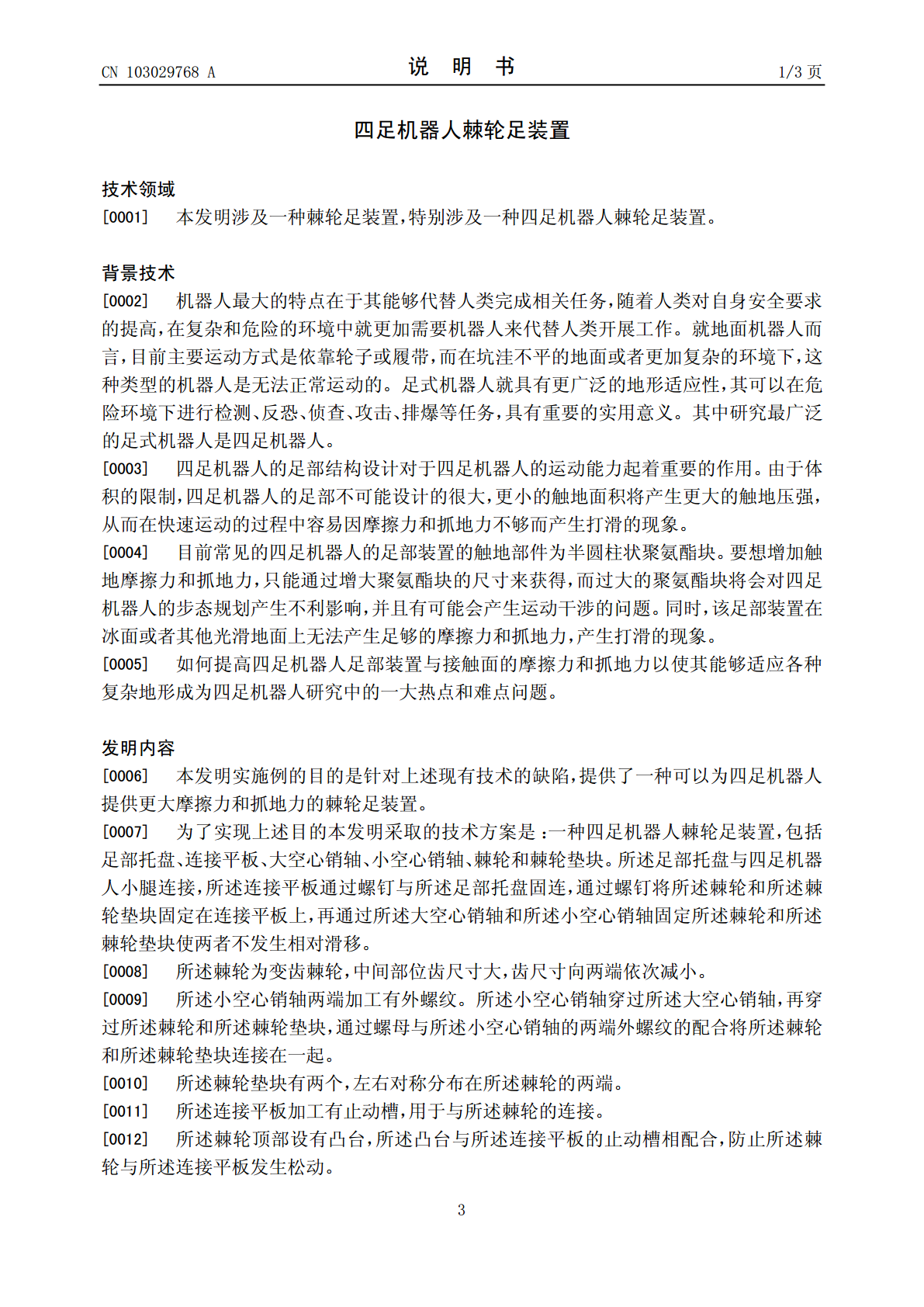
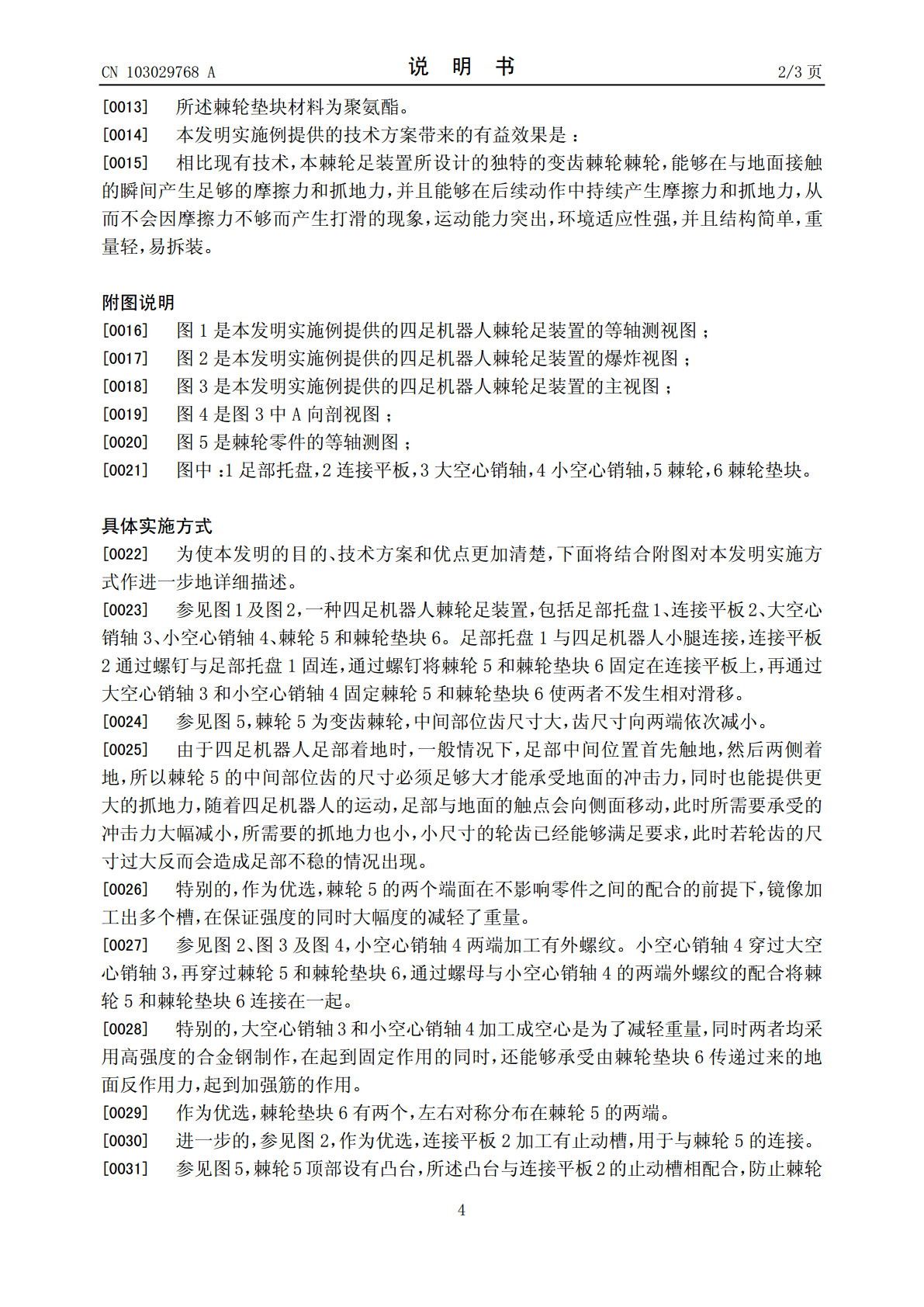
本发明公布了一种四足机器人棘轮足装置,所述棘轮足装置安装在四足机器人腿部,所述棘轮足装置包括足部托盘、连接平板、大空心销轴、小空心销轴、棘轮和棘轮垫块,足部托盘与四足机器人小腿连接,连接平板通过螺钉与足部托盘固连,通过螺钉将棘轮和棘轮垫块固定在连接平板上,再通过大空心销轴和小空心销轴固定棘轮和棘轮垫块使两者不发生相对滑移。基于独特的棘轮的设计,可以使四足机器人在与地面接触时产生良好的摩擦力和抓地力。本发明四足机器人棘轮足装置,具有结构简单,重量轻,拆装方便,抓地力强,运动能力突出等特点。

足端装置及足式机器人.pdf
本发明公开了一种足端装置及足式机器人,足端装置包括支撑杆、固定件和预紧组件;固定件沿第一方向设有活动孔,支撑杆的第一端位于活动孔内并能够在活动孔内活动,固定件与支撑杆之间设有防止支撑杆从活动孔脱离的限位结构,固定件的表面设有沿第二方向设置的安装通孔,第二方向与第一方向不平行,安装通孔设有至少两个并沿固定件的周向呈间隔设置;预紧组件设有至少两个并与安装通孔一一对应,预紧组件包括弹性件,弹性件的第一端通过安装通孔伸入固定件内并抵压支撑杆,弹性件的第二端与固定件固定。支撑杆能够相对固定件进行一定幅度的摆动和伸缩

四足搬运机器人装置.pdf
本实用新型公开了一种四足搬运机器人装置,包括上躯干、下躯干、躯干连接板、四根腿支链转轴、四个电推杆和四个腿支链;所述上躯干和下躯干通过躯干连接板固定在一起,四个腿支链分别通过四个腿支链转轴与上躯干和下躯干连接在一起;四个电推杆的一端连接均连接在躯干连接板上,四个电推杆的另一端分别连接四个腿支链并用于驱动四个腿支链绕对应的腿支链转轴转动;本实用新型采用对称结构设计,运动灵活,承载能力强,具有结构简单紧凑,设计合理,加工和装配工艺良好的优点;通过曲柄驱动可以实现足部在地面上长时间的做匀速直线运动,加强了行走时
机器人腿足装置.pdf
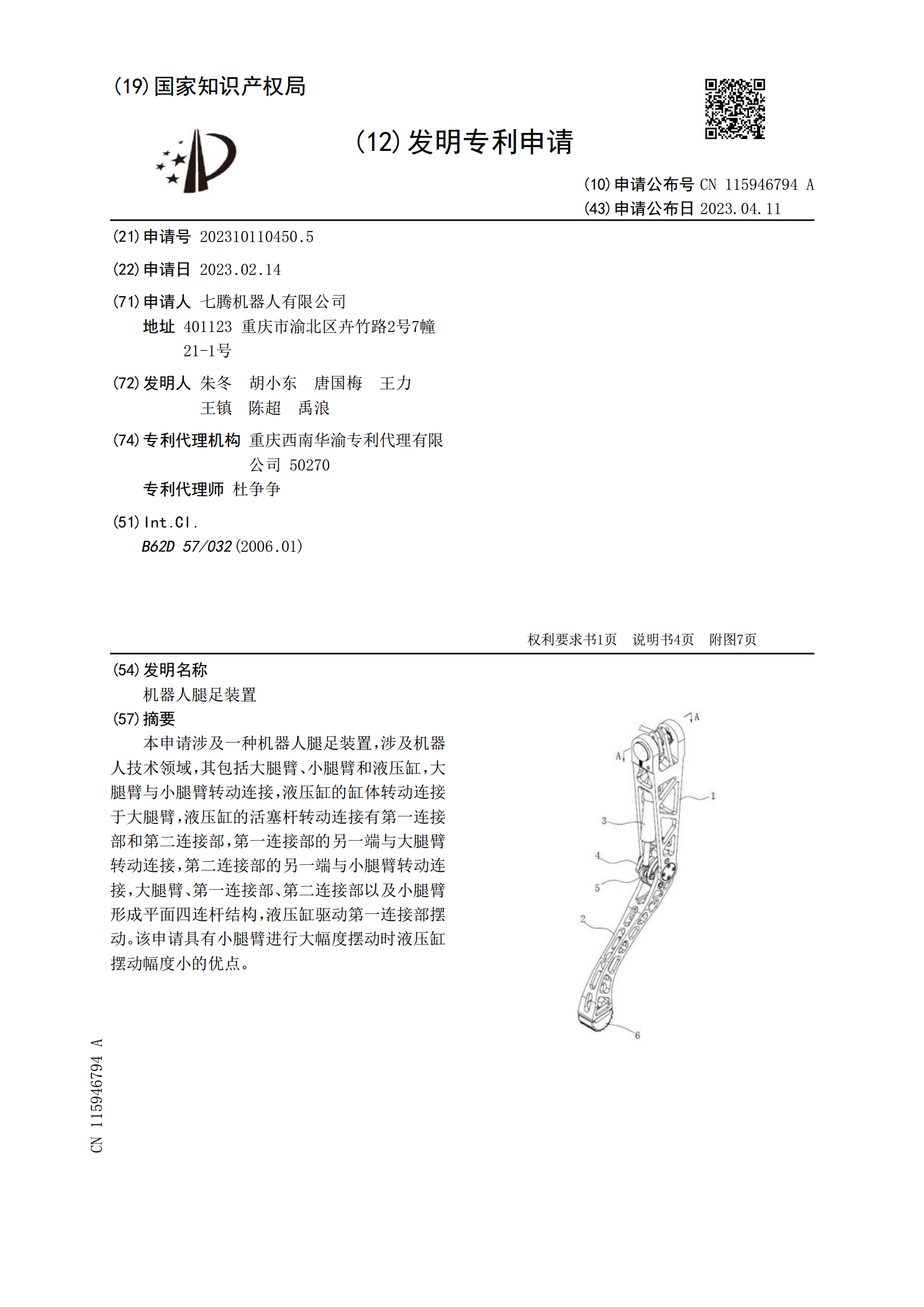
本申请涉及一种机器人腿足装置,涉及机器人技术领域,其包括大腿臂、小腿臂和液压缸,大腿臂与小腿臂转动连接,液压缸的缸体转动连接于大腿臂,液压缸的活塞杆转动连接有第一连接部和第二连接部,第一连接部的另一端与大腿臂转动连接,第二连接部的另一端与小腿臂转动连接,大腿臂、第一连接部、第二连接部以及小腿臂形成平面四连杆结构,液压缸驱动第一连接部摆动。该申请具有小腿臂进行大幅度摆动时液压缸摆动幅度小的优点。

多足机器人关节控制方法、装置和多足机器人.pdf
本发明实施例公开了一种多足机器人关节控制方法、装置和多足机器人,方法包括:构建躯干受力到所有支撑腿的足底期望支撑力的映射矩阵;对躯干受力进行目标优先级划分并确定每一优先级目标的权重矩阵并基于映射矩阵和权重矩阵构建各优先级目标关于足底期望支撑力的优化模型;对各优化模型依次求解以得到对应的足底期望支撑力;其中,当前优先级目标对应的足底期望支撑力作为下一优先级目标的足底期望支撑力的求解基础;基于足底期望支撑力和雅克比矩阵计算支撑腿的关节力矩以用于关节控制。本发明的技术方案可很好地解决现有技术中无论如何调整躯干受