
一种上肢康复机器人的肢体重力动态补偿方法.pdf

靖烟****魔王


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种上肢康复机器人的肢体重力动态补偿方法.pdf
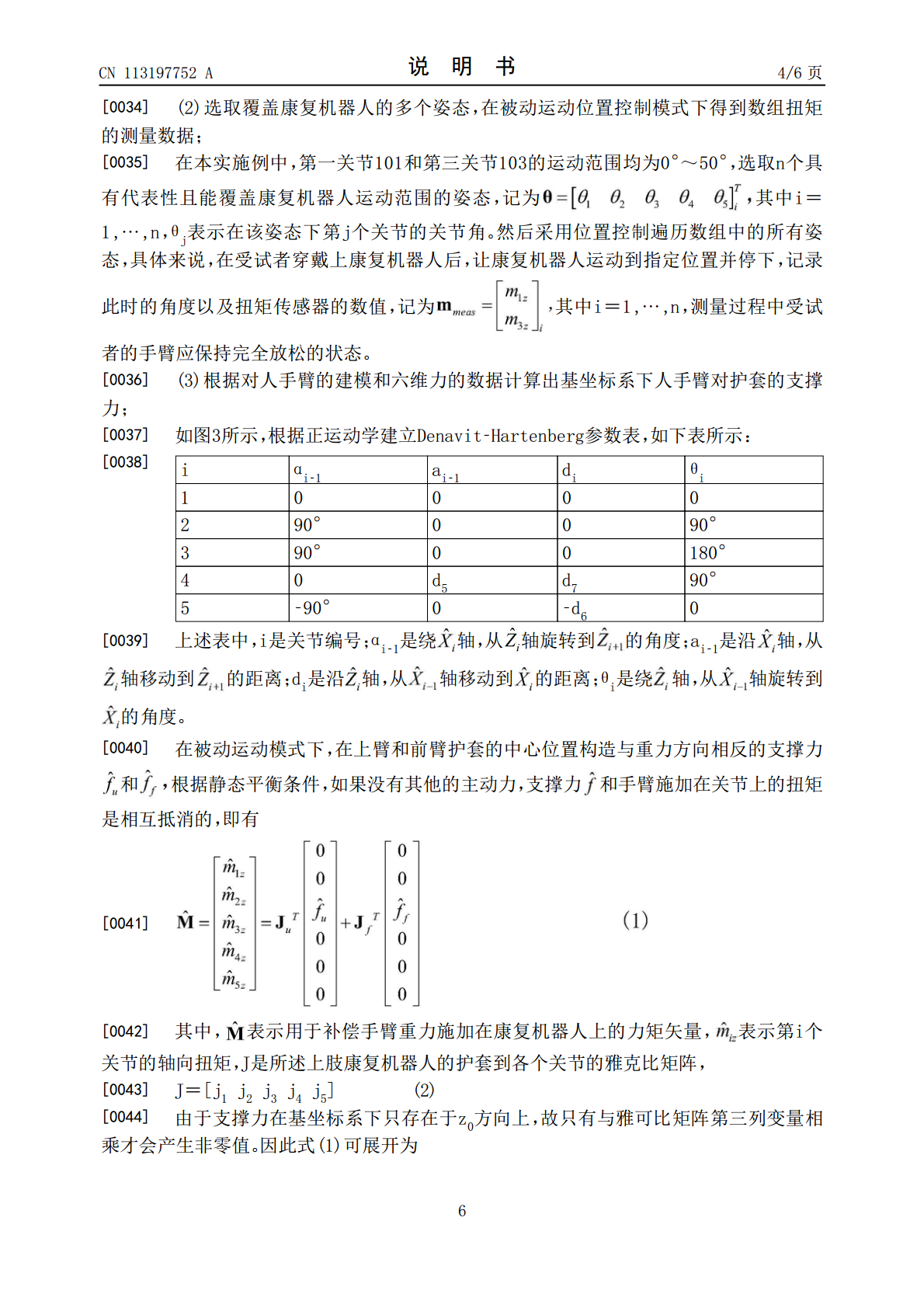
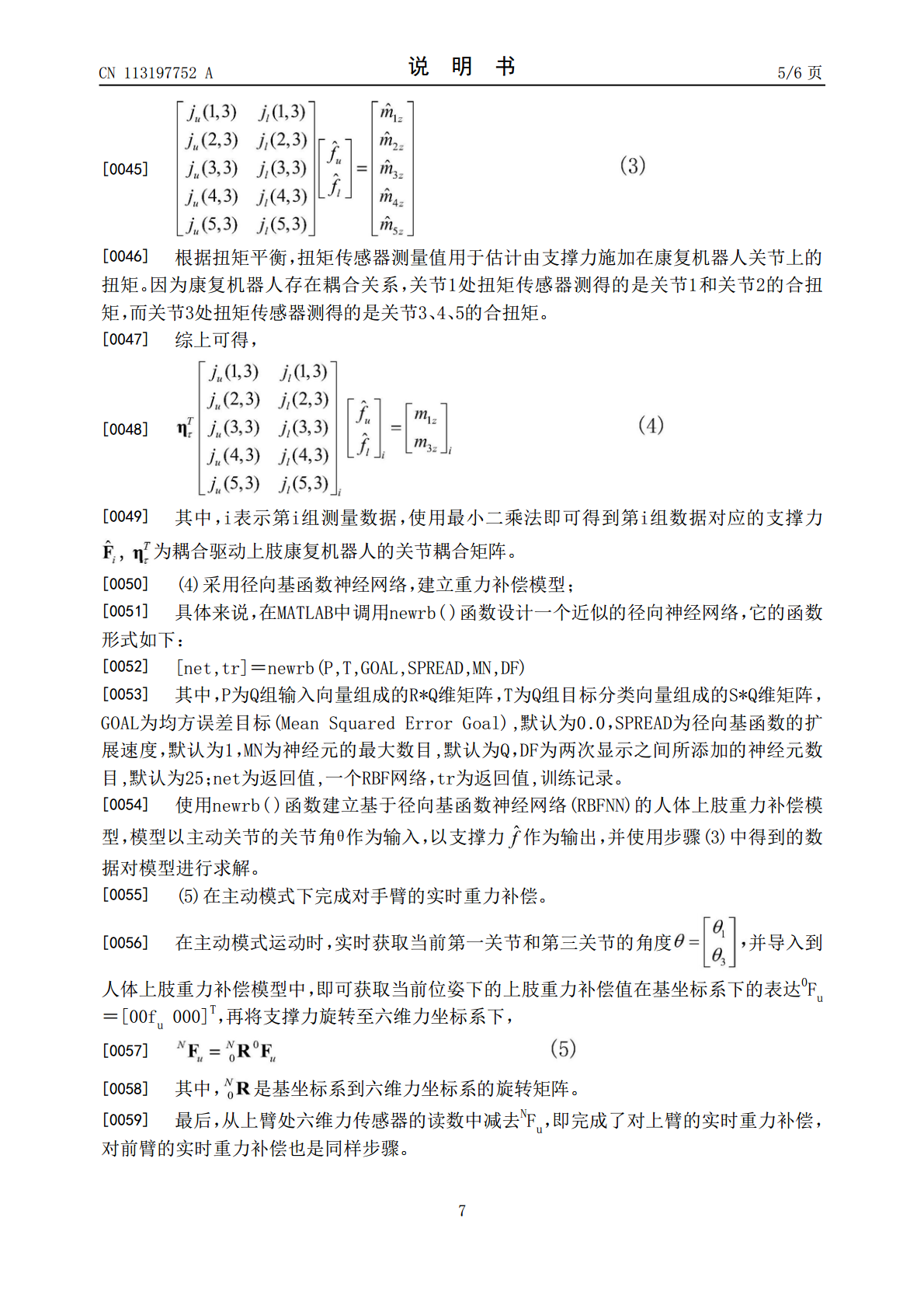
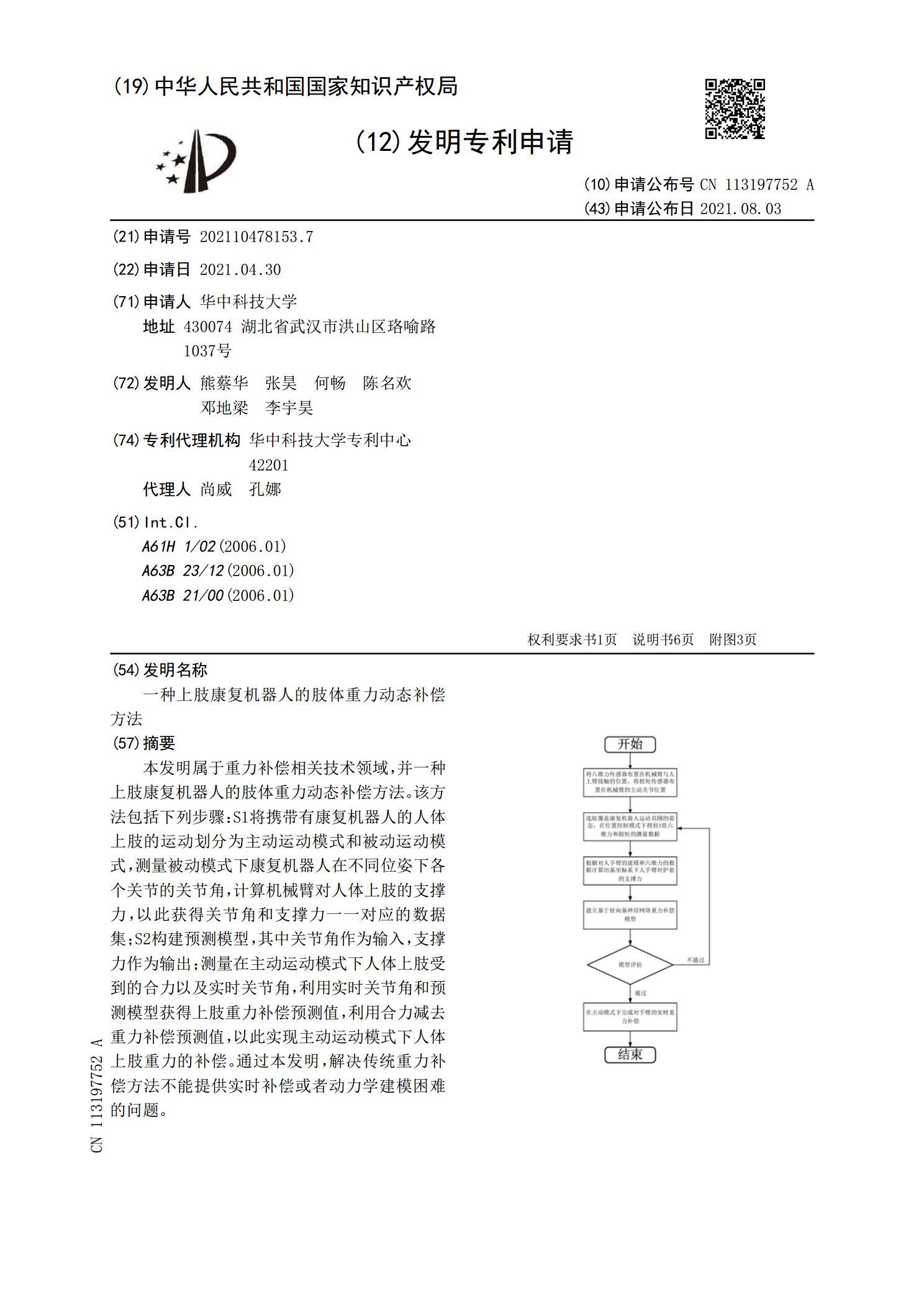
本发明属于重力补偿相关技术领域,并一种上肢康复机器人的肢体重力动态补偿方法。该方法包括下列步骤:S1将携带有康复机器人的人体上肢的运动划分为主动运动模式和被动运动模式,测量被动模式下康复机器人在不同位姿下各个关节的关节角,计算机械臂对人体上肢的支撑力,以此获得关节角和支撑力一一对应的数据集;S2构建预测模型,其中关节角作为输入,支撑力作为输出;测量在主动运动模式下人体上肢受到的合力以及实时关节角,利用实时关节角和预测模型获得上肢重力补偿预测值,利用合力减去重力补偿预测值,以此实现主动运动模式下人体上肢重力
上肢康复机器人重力补偿方法、装置及上肢康复机器人.pdf
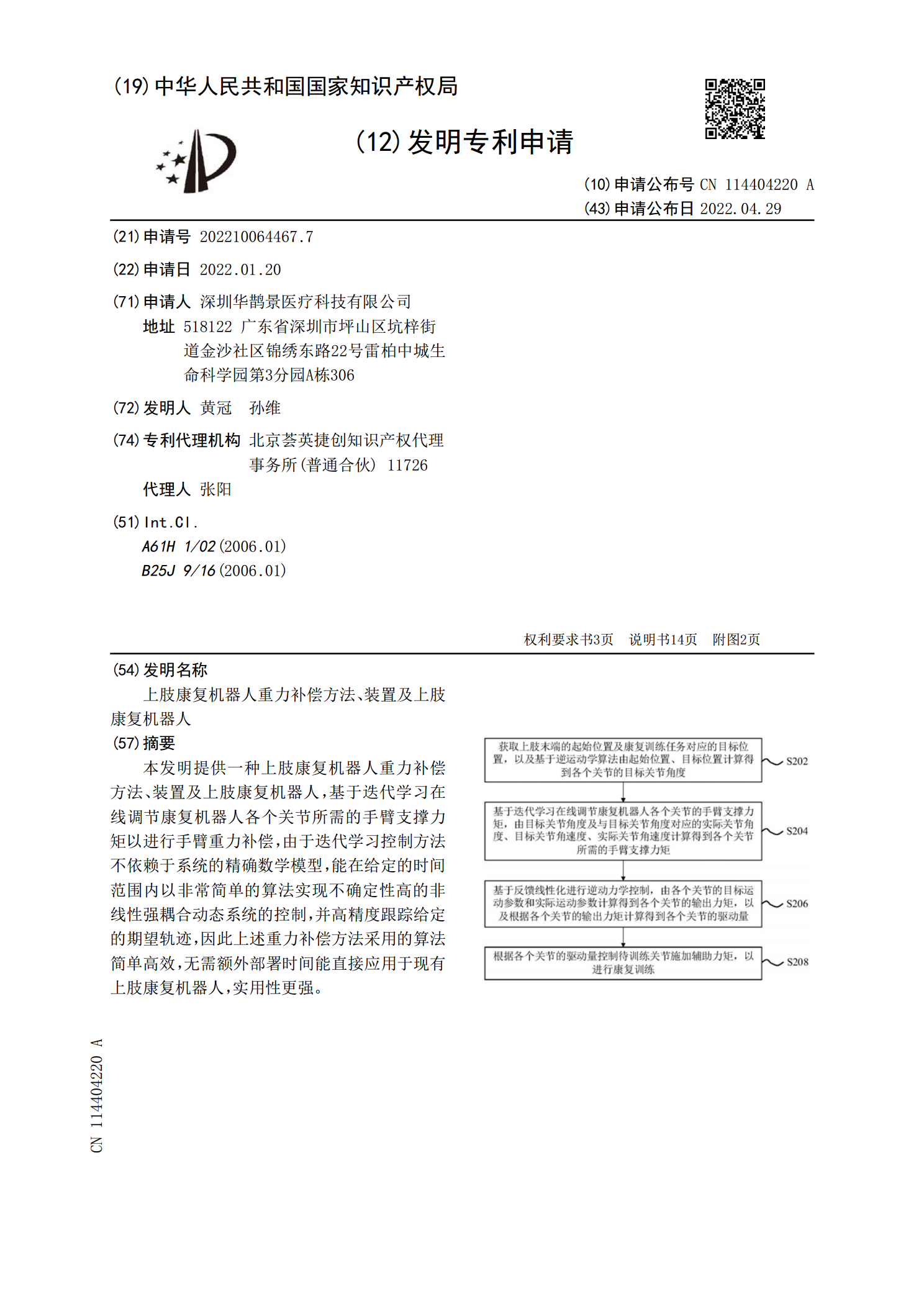
本发明提供一种上肢康复机器人重力补偿方法、装置及上肢康复机器人,基于迭代学习在线调节康复机器人各个关节所需的手臂支撑力矩以进行手臂重力补偿,由于迭代学习控制方法不依赖于系统的精确数学模型,能在给定的时间范围内以非常简单的算法实现不确定性高的非线性强耦合动态系统的控制,并高精度跟踪给定的期望轨迹,因此上述重力补偿方法采用的算法简单高效,无需额外部署时间能直接应用于现有上肢康复机器人,实用性更强。

一种基于重力补偿的主动上肢康复装置.pdf
本发明公开一种基于重力补偿的主动上肢康复装置,包括机架组件、大臂支撑组件、弹簧组件、皮带耦合连杆机构、气动人工肌肉驱动组件、小臂支撑板,各组件组合安装在一起,以气动人工肌肉作为驱动器来平衡人体上肢重力和运动机构中各个零部件的重力。本发明能实现患者上肢在无重力环境下进行康复训练的目的,体积小,质量轻,康复效果好,适应性好,柔顺性好。

一种基于空间重力平衡的上肢康复外骨骼.pdf
本发明涉及上肢康复技术领域,且公开了一种基于空间重力平衡的上肢康复外骨骼,包括柔性囊,所述柔性囊的内部活动连接有棘轮,棘轮的表面活动连接有棘爪,棘爪远离棘轮的一端活动连接有卡盘,卡盘的表面套接有涡卷弹簧,所述棘轮的表面活动连接有弹力带,弹力带的两端均活动连接有转轴,转轴的底部固定连接有伸缩杆,通过当患者想要弯曲手臂时,手肘弯曲会拉伸柔性囊,故螺杆经啮合轴赋予一定的转速后带动转轴逆时针旋转,故其表面的弹力带被释放,弹力带受到的拉力变小故其弹力收缩,并拉动柔性囊两侧的手肘相互靠近,故从而达到了克服重力势能并使
一种卧姿上肢康复机器人.pdf
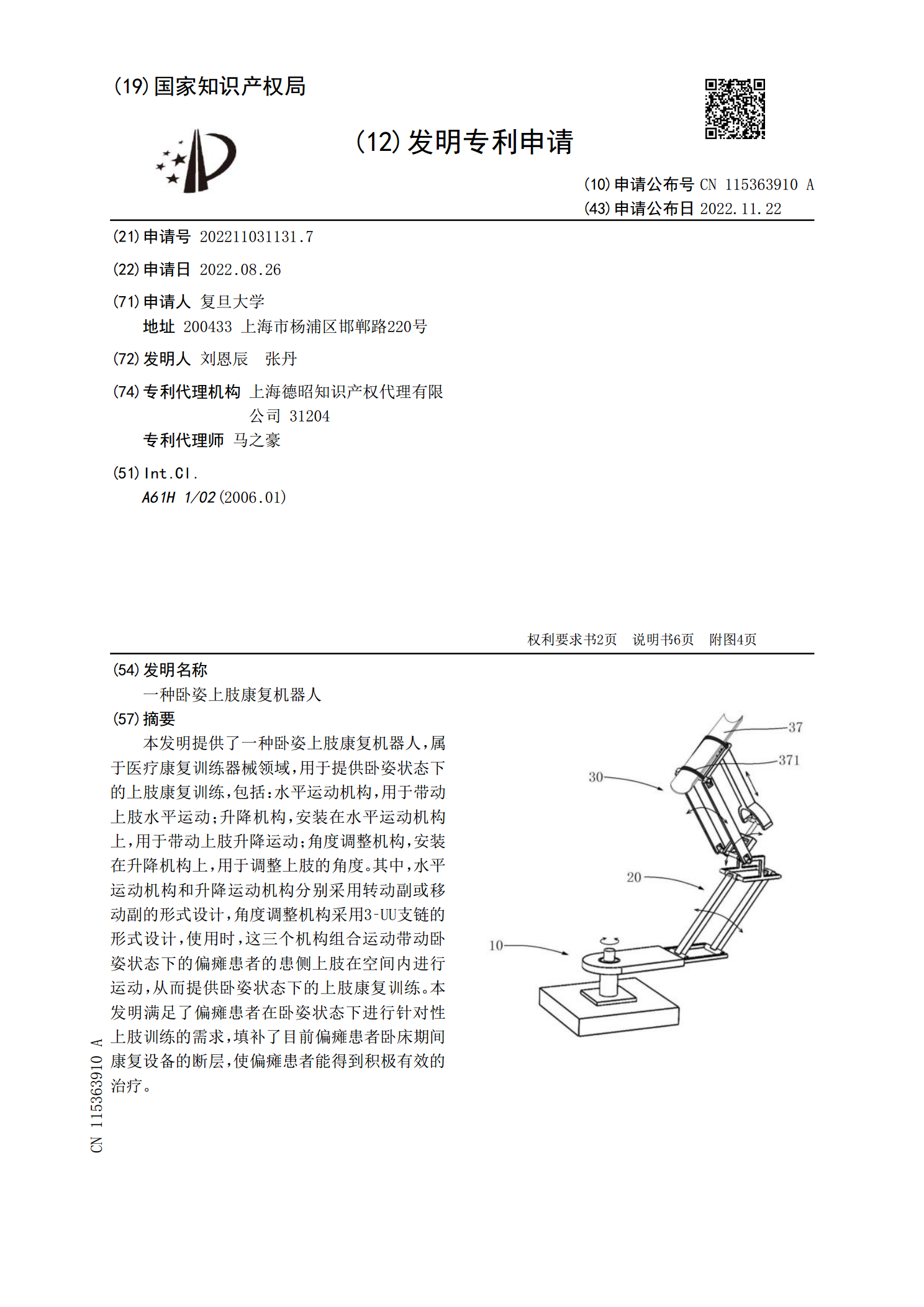
本发明提供了一种卧姿上肢康复机器人,属于医疗康复训练器械领域,用于提供卧姿状态下的上肢康复训练,包括:水平运动机构,用于带动上肢水平运动;升降机构,安装在水平运动机构上,用于带动上肢升降运动;角度调整机构,安装在升降机构上,用于调整上肢的角度。其中,水平运动机构和升降运动机构分别采用转动副或移动副的形式设计,角度调整机构采用3‑UU支链的形式设计,使用时,这三个机构组合运动带动卧姿状态下的偏瘫患者的患侧上肢在空间内进行运动,从而提供卧姿状态下的上肢康复训练。本发明满足了偏瘫患者在卧姿状态下进行针对性上肢训