
一种卧姿上肢康复机器人.pdf

森林****io


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种卧姿上肢康复机器人.pdf
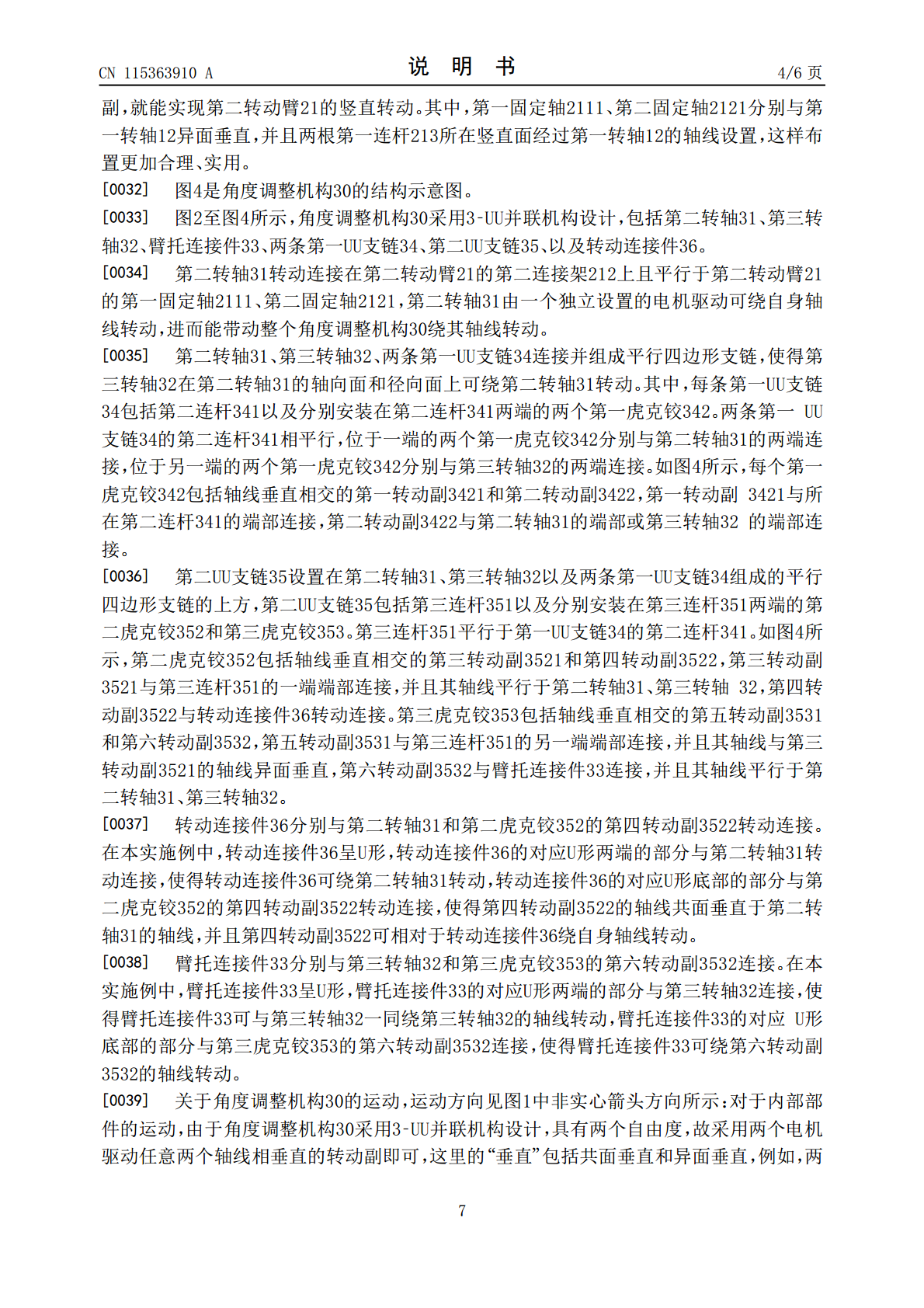
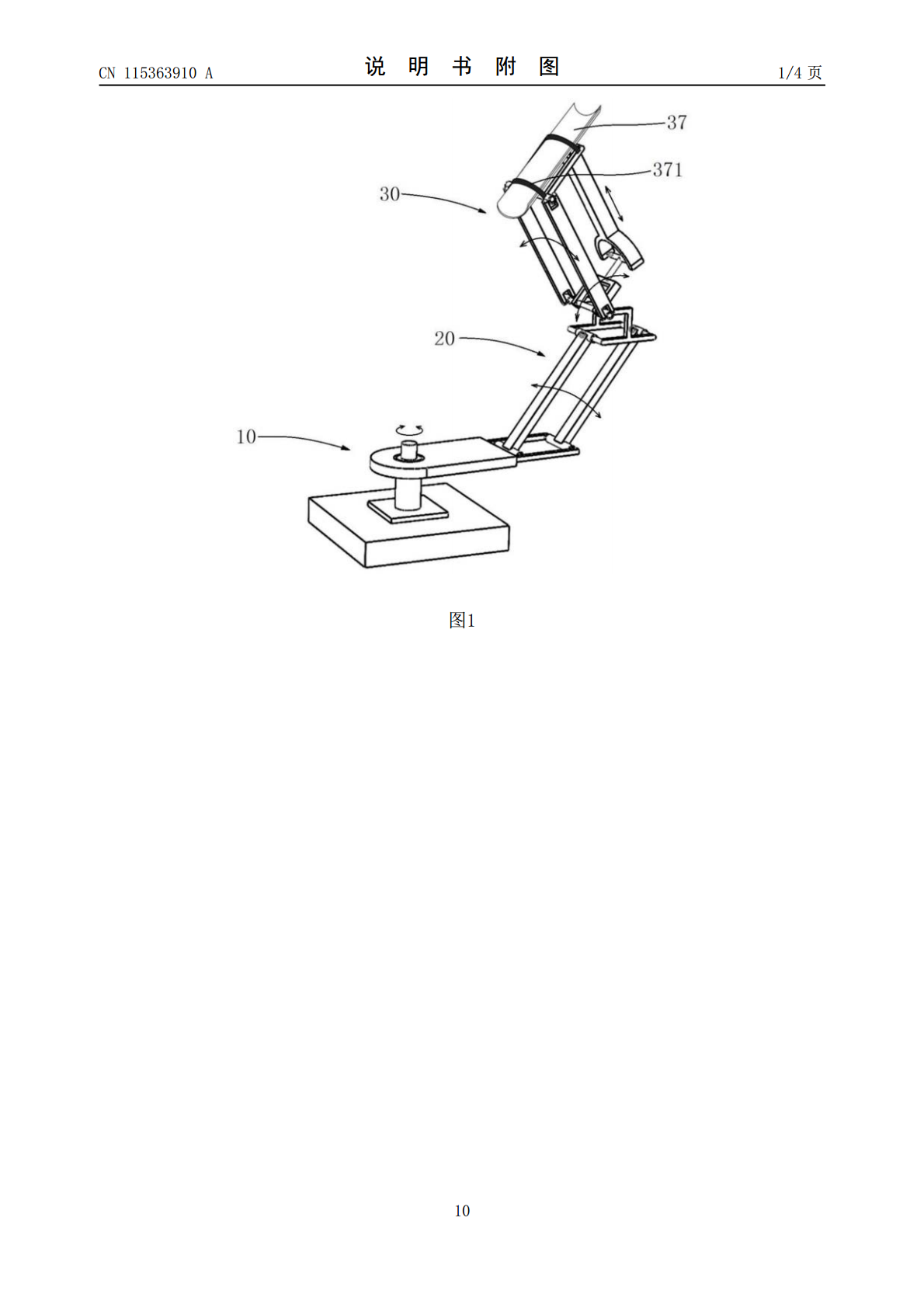
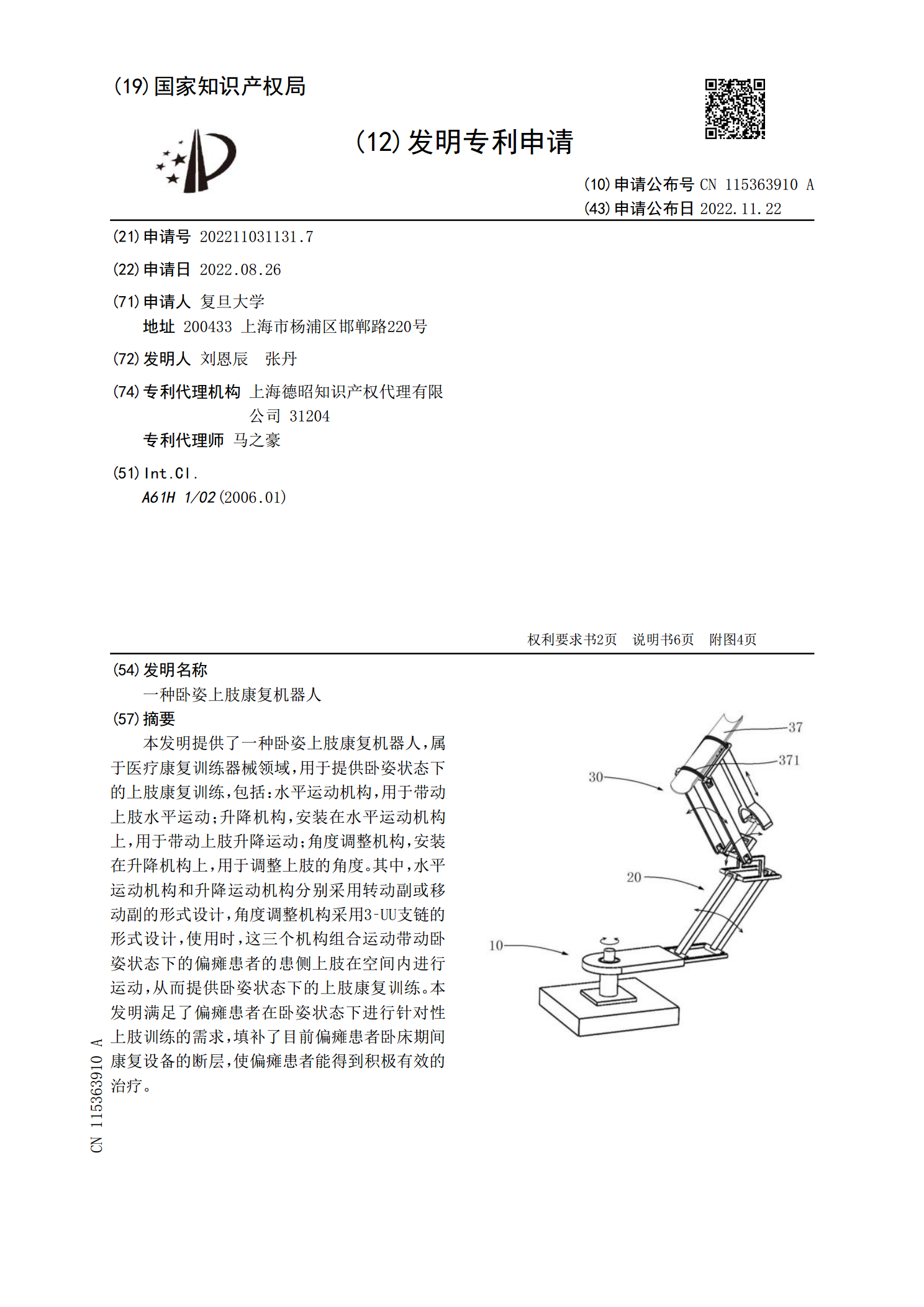
本发明提供了一种卧姿上肢康复机器人,属于医疗康复训练器械领域,用于提供卧姿状态下的上肢康复训练,包括:水平运动机构,用于带动上肢水平运动;升降机构,安装在水平运动机构上,用于带动上肢升降运动;角度调整机构,安装在升降机构上,用于调整上肢的角度。其中,水平运动机构和升降运动机构分别采用转动副或移动副的形式设计,角度调整机构采用3‑UU支链的形式设计,使用时,这三个机构组合运动带动卧姿状态下的偏瘫患者的患侧上肢在空间内进行运动,从而提供卧姿状态下的上肢康复训练。本发明满足了偏瘫患者在卧姿状态下进行针对性上肢训
一种上肢康复机器人.pdf
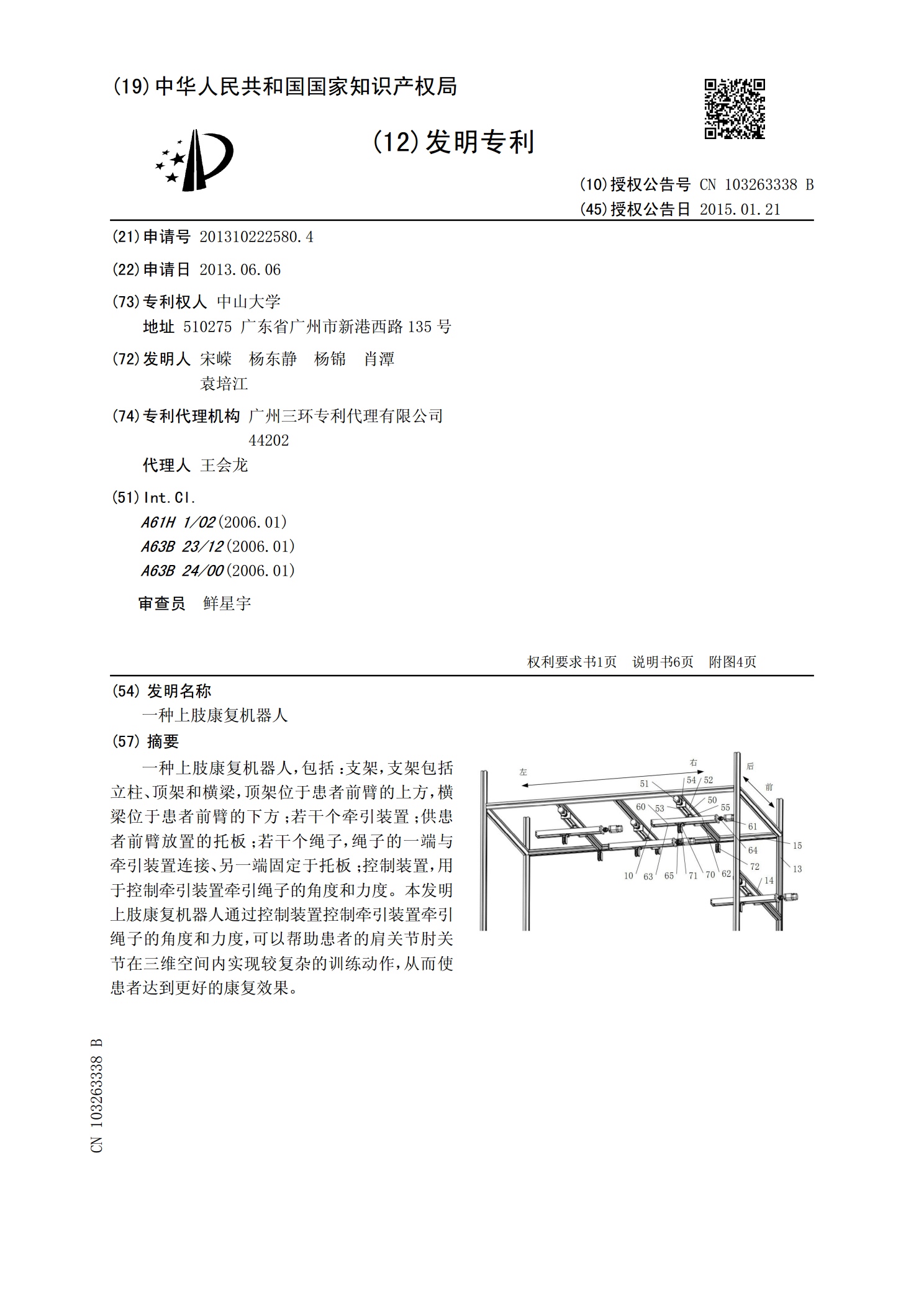
一种上肢康复机器人,包括:支架,支架包括立柱、顶架和横梁,顶架位于患者前臂的上方,横梁位于患者前臂的下方;若干个牵引装置;供患者前臂放置的托板;若干个绳子,绳子的一端与牵引装置连接、另一端固定于托板;控制装置,用于控制牵引装置牵引绳子的角度和力度。本发明上肢康复机器人通过控制装置控制牵引装置牵引绳子的角度和力度,可以帮助患者的肩关节肘关节在三维空间内实现较复杂的训练动作,从而使患者达到更好的康复效果。
上肢康复机器人重力补偿方法、装置及上肢康复机器人.pdf
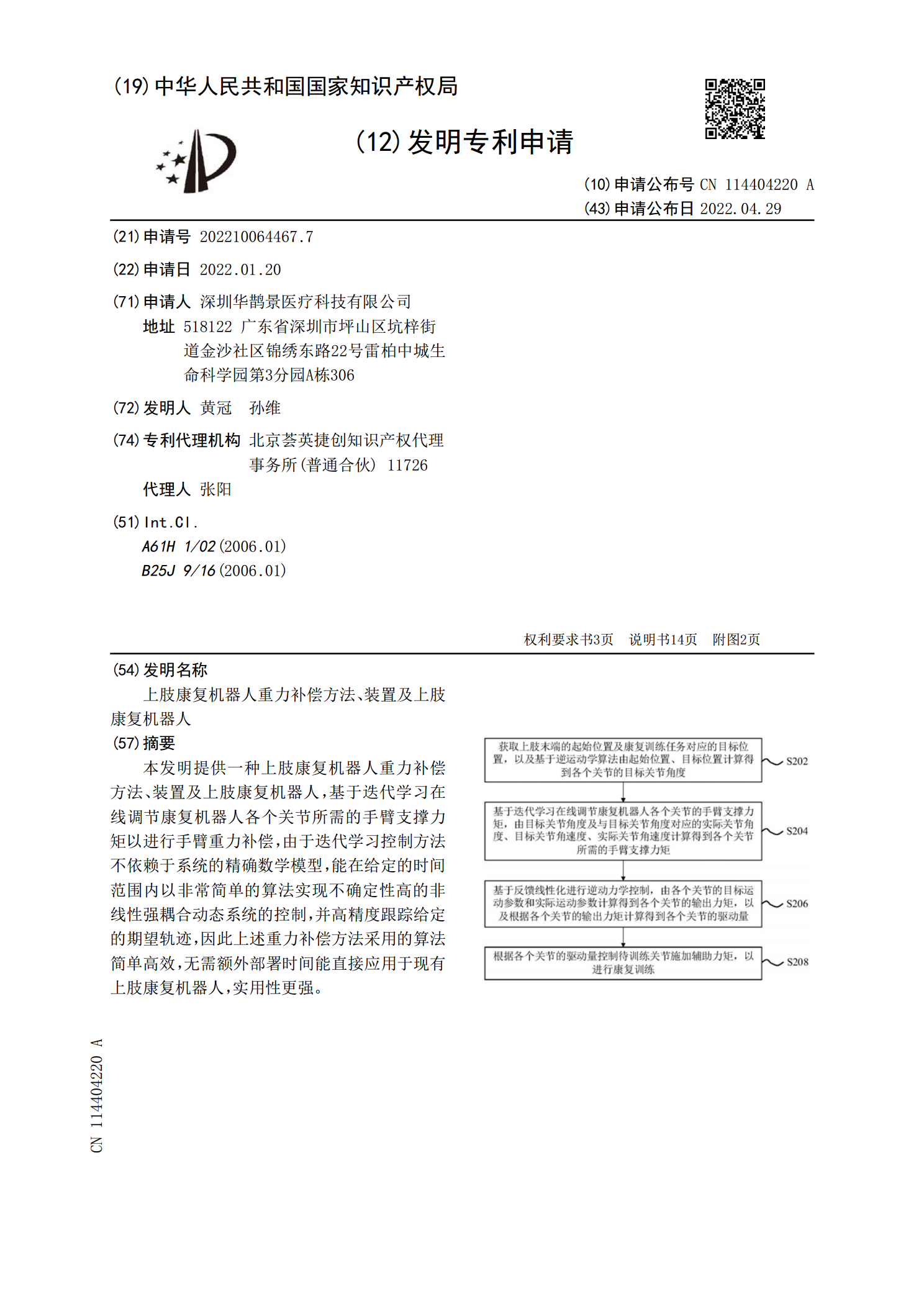
本发明提供一种上肢康复机器人重力补偿方法、装置及上肢康复机器人,基于迭代学习在线调节康复机器人各个关节所需的手臂支撑力矩以进行手臂重力补偿,由于迭代学习控制方法不依赖于系统的精确数学模型,能在给定的时间范围内以非常简单的算法实现不确定性高的非线性强耦合动态系统的控制,并高精度跟踪给定的期望轨迹,因此上述重力补偿方法采用的算法简单高效,无需额外部署时间能直接应用于现有上肢康复机器人,实用性更强。
一种上肢康复训练机器人.pdf
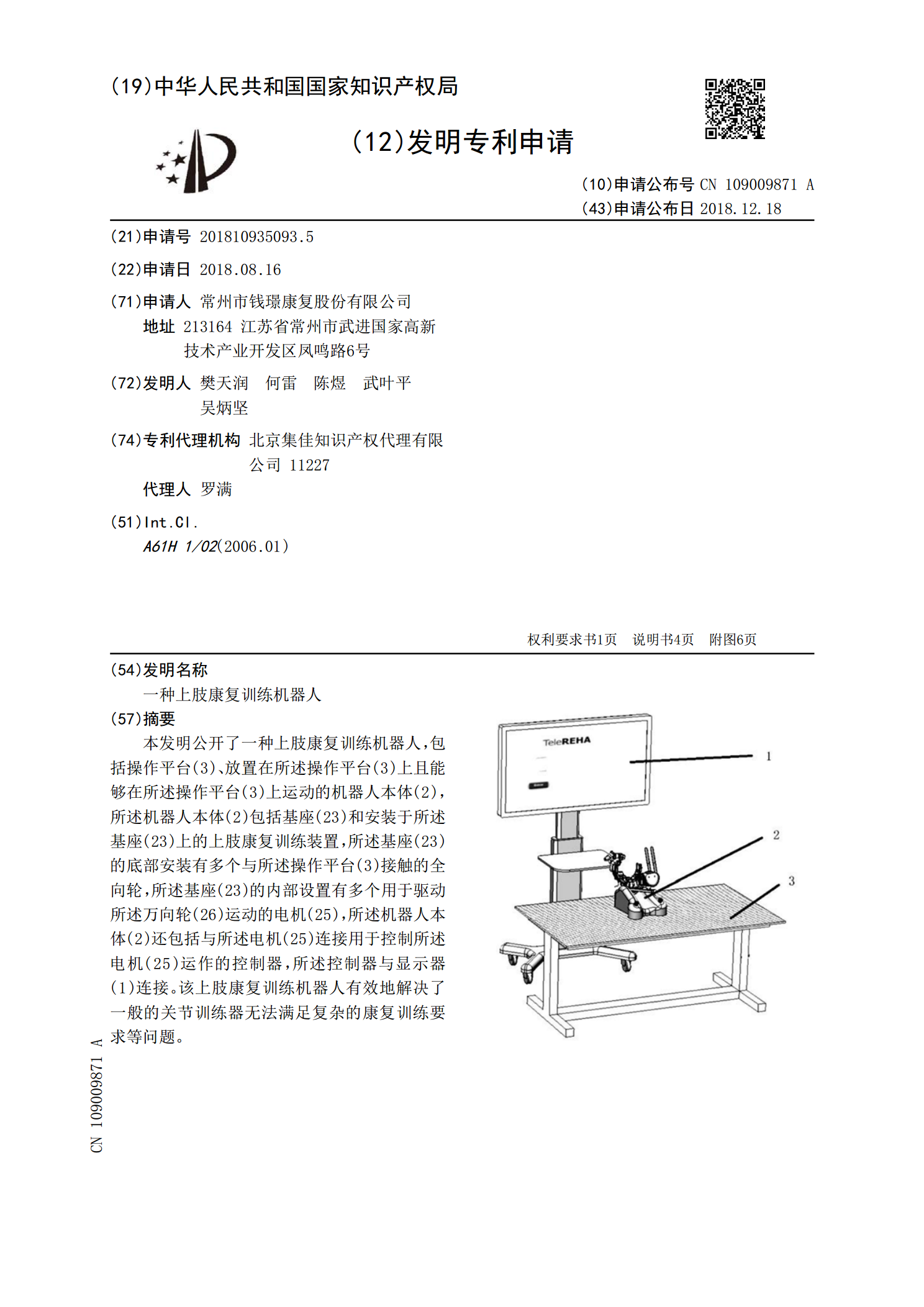
本发明公开了一种上肢康复训练机器人,包括操作平台(3)、放置在所述操作平台(3)上且能够在所述操作平台(3)上运动的机器人本体(2),所述机器人本体(2)包括基座(23)和安装于所述基座(23)上的上肢康复训练装置,所述基座(23)的底部安装有多个与所述操作平台(3)接触的全向轮,所述基座(23)的内部设置有多个用于驱动所述万向轮(26)运动的电机(25),所述机器人本体(2)还包括与所述电机(25)连接用于控制所述电机(25)运作的控制器,所述控制器与显示器(1)连接。该上肢康复训练机器人有效地解决了一
一种上肢康复训练机器人.pdf
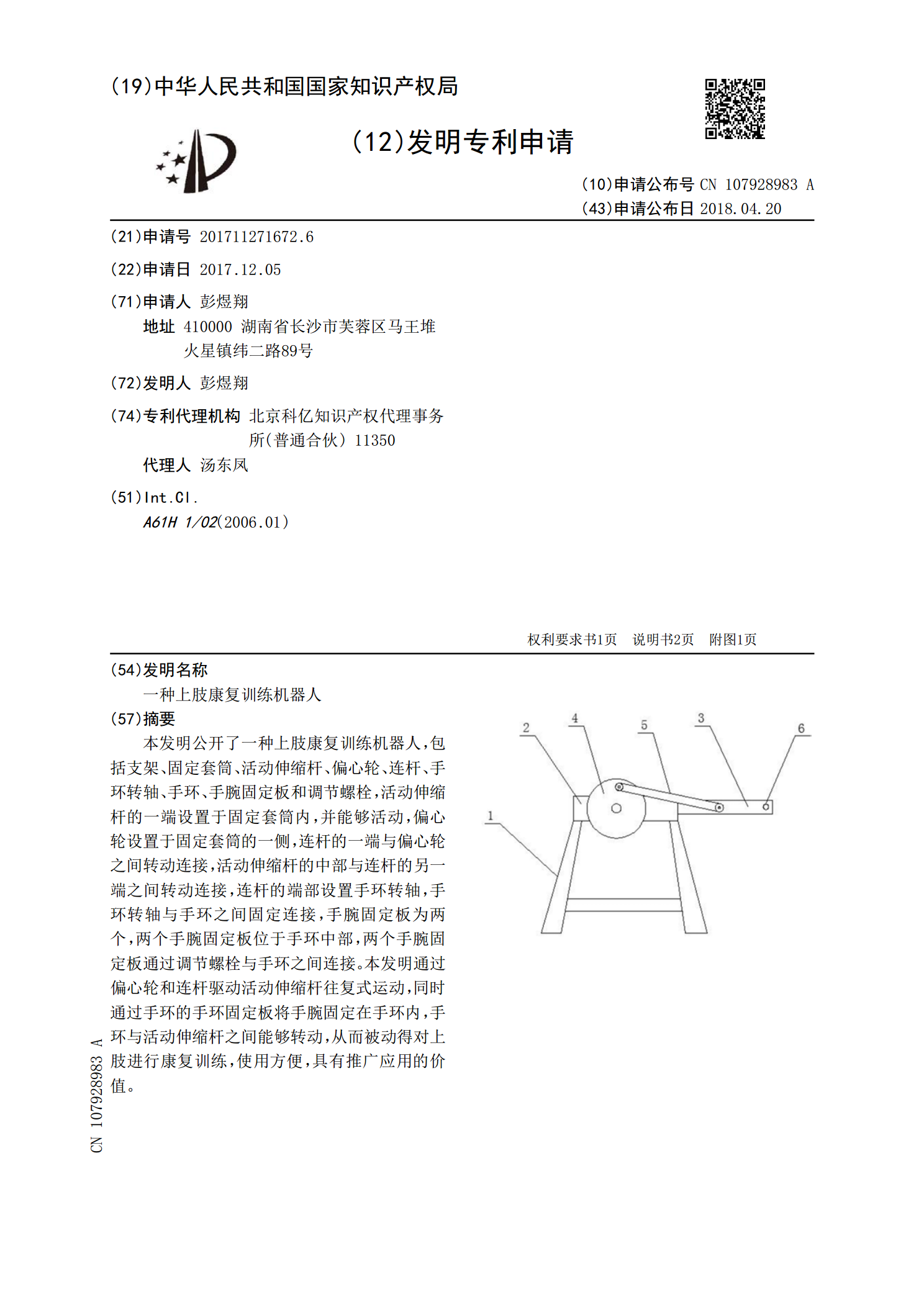
本发明公开了一种上肢康复训练机器人,包括支架、固定套筒、活动伸缩杆、偏心轮、连杆、手环转轴、手环、手腕固定板和调节螺栓,活动伸缩杆的一端设置于固定套筒内,并能够活动,偏心轮设置于固定套筒的一侧,连杆的一端与偏心轮之间转动连接,活动伸缩杆的中部与连杆的另一端之间转动连接,连杆的端部设置手环转轴,手环转轴与手环之间固定连接,手腕固定板为两个,两个手腕固定板位于手环中部,两个手腕固定板通过调节螺栓与手环之间连接。本发明通过偏心轮和连杆驱动活动伸缩杆往复式运动,同时通过手环的手环固定板将手腕固定在手环内,手环与活