
上肢康复机器人重力补偿方法、装置及上肢康复机器人.pdf

一条****杉淑

1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
上肢康复机器人重力补偿方法、装置及上肢康复机器人.pdf
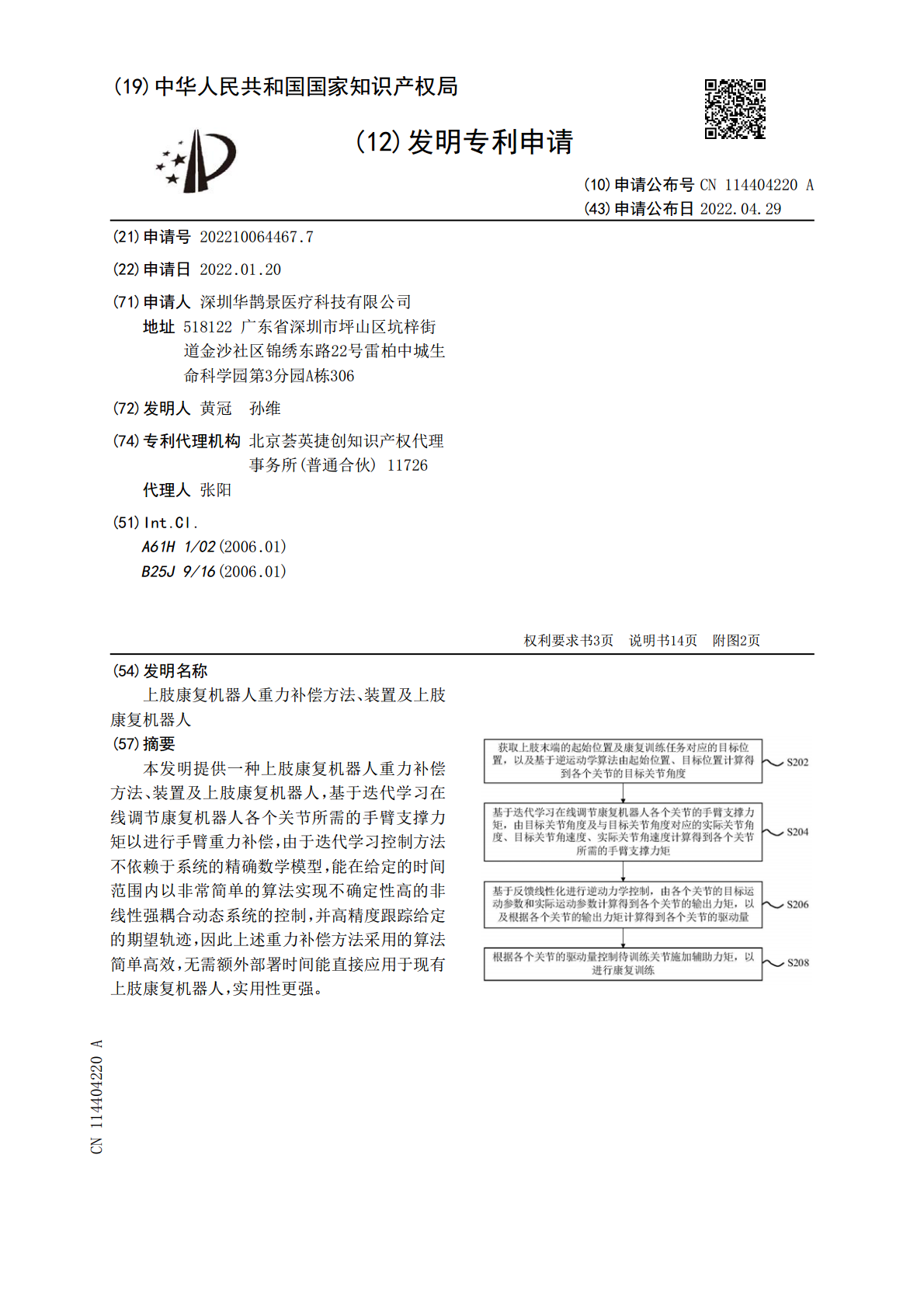
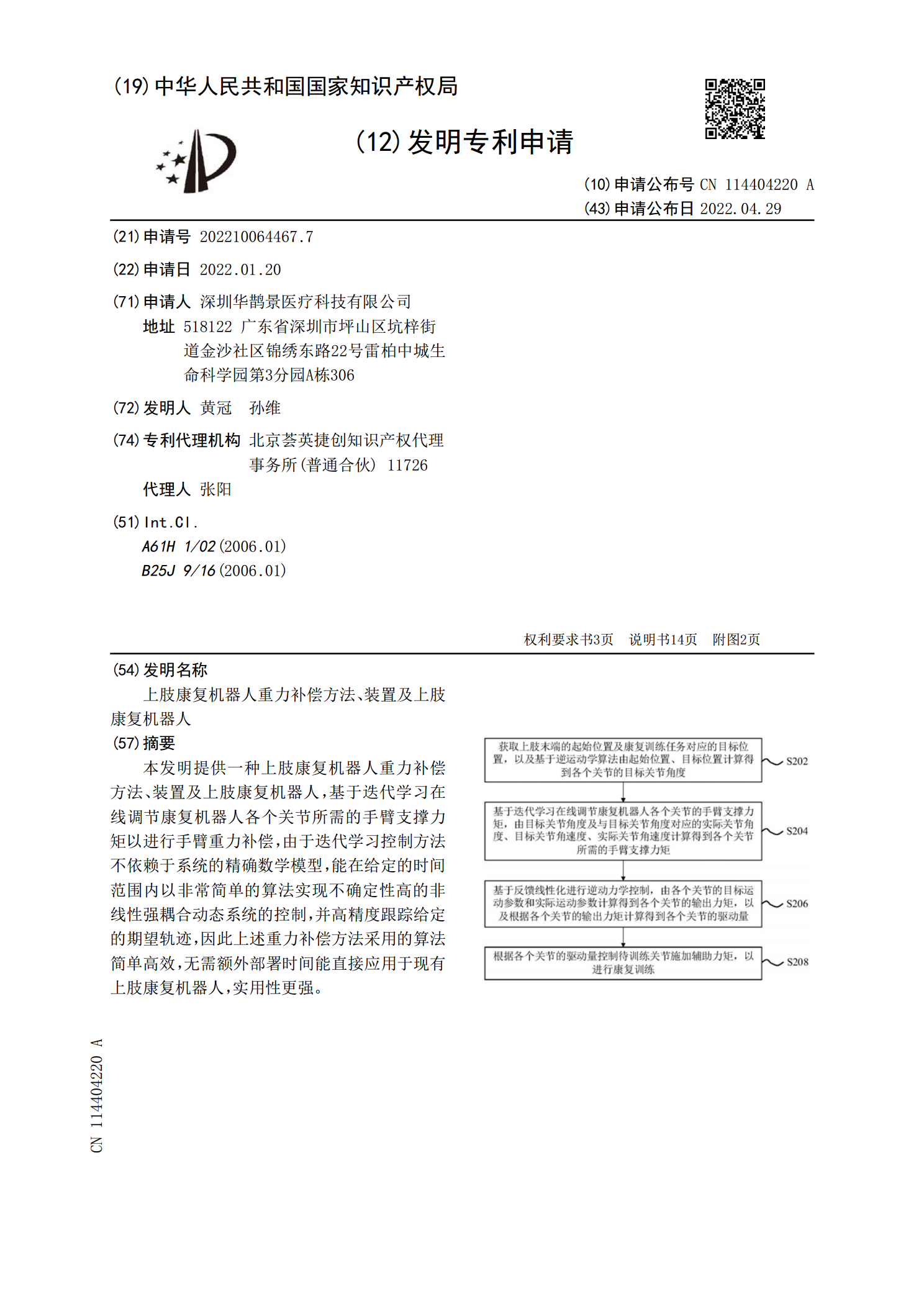
本发明提供一种上肢康复机器人重力补偿方法、装置及上肢康复机器人,基于迭代学习在线调节康复机器人各个关节所需的手臂支撑力矩以进行手臂重力补偿,由于迭代学习控制方法不依赖于系统的精确数学模型,能在给定的时间范围内以非常简单的算法实现不确定性高的非线性强耦合动态系统的控制,并高精度跟踪给定的期望轨迹,因此上述重力补偿方法采用的算法简单高效,无需额外部署时间能直接应用于现有上肢康复机器人,实用性更强。
一种上肢康复机器人的肢体重力动态补偿方法.pdf
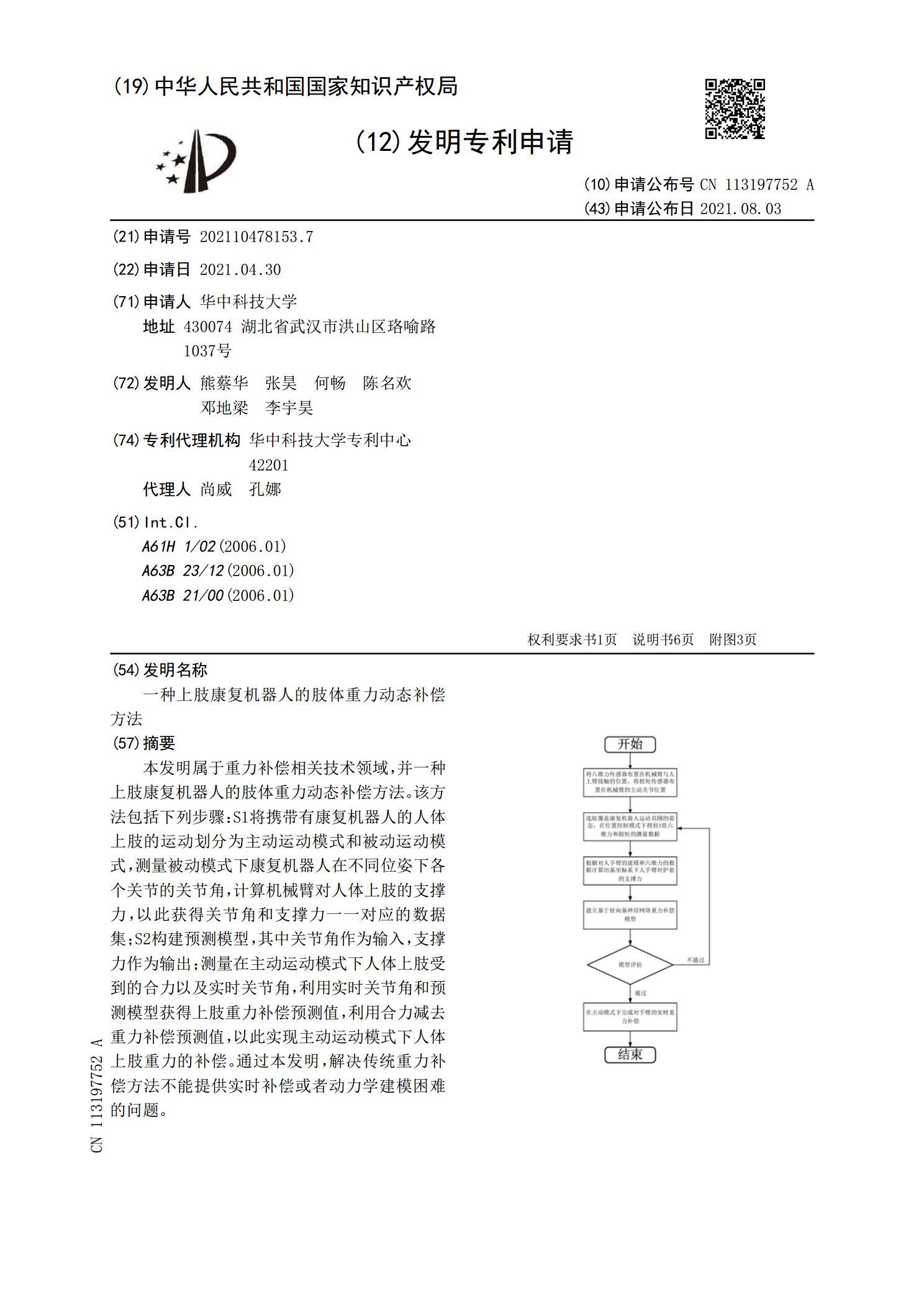
本发明属于重力补偿相关技术领域,并一种上肢康复机器人的肢体重力动态补偿方法。该方法包括下列步骤:S1将携带有康复机器人的人体上肢的运动划分为主动运动模式和被动运动模式,测量被动模式下康复机器人在不同位姿下各个关节的关节角,计算机械臂对人体上肢的支撑力,以此获得关节角和支撑力一一对应的数据集;S2构建预测模型,其中关节角作为输入,支撑力作为输出;测量在主动运动模式下人体上肢受到的合力以及实时关节角,利用实时关节角和预测模型获得上肢重力补偿预测值,利用合力减去重力补偿预测值,以此实现主动运动模式下人体上肢重力

一种基于重力补偿的主动上肢康复装置.pdf
本发明公开一种基于重力补偿的主动上肢康复装置,包括机架组件、大臂支撑组件、弹簧组件、皮带耦合连杆机构、气动人工肌肉驱动组件、小臂支撑板,各组件组合安装在一起,以气动人工肌肉作为驱动器来平衡人体上肢重力和运动机构中各个零部件的重力。本发明能实现患者上肢在无重力环境下进行康复训练的目的,体积小,质量轻,康复效果好,适应性好,柔顺性好。

上肢及头部康复训练机器人.pdf
本发明公开了上肢及头部康复训练机器人,包括机箱组件、座椅、两个独立或者协同训练左、右肢的上肢组件、头部纠正组件以及设置于上肢组件、头部纠正组件上的传感器,座椅设置于机箱组件上,两个上肢组件分设座椅两侧,每一个上肢组件均包括锁关节组件和手臂组件,手臂组件包括依次连接的锁骨臂组件、大臂组件和小臂组件,大臂组件上设置有大臂承托组件,小臂组件上设置有小臂承托组件,头部纠正组件包括依次连接的头部摆动组件一、头部摆动组件二以及头部调节组件。本发明结构简单、能够独立或者协同对左、右肢及头部进行康复训练,训练模式多元化,

上肢康复机器人研究综述.docx
上肢康复机器人研究综述1.内容简述本文主要综述了上肢康复机器人的研究现状和发展趋势,首先介绍了上肢康复机器人的定义、分类以及应用领域,然后详细阐述了上肢康复机器人的技术原理和结构特点。对国内外上肢康复机器人的发展历程进行了梳理,重点关注了近年来的主要研究成果和技术进展。在此基础上,分析了上肢康复机器人在临床应用中的优势和局限性,并提出了未来研究方向和挑战。还对上肢康复机器人的市场前景进行了预测,并探讨了其在促进康复医学发展和提高患者生活质量方面的作用。1.1研究背景与意义随着医疗技术的不断进步和人口老龄化