
玻璃搬运机器人及其搬运方法.pdf

文阁****23

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
玻璃搬运机器人及其搬运方法.pdf
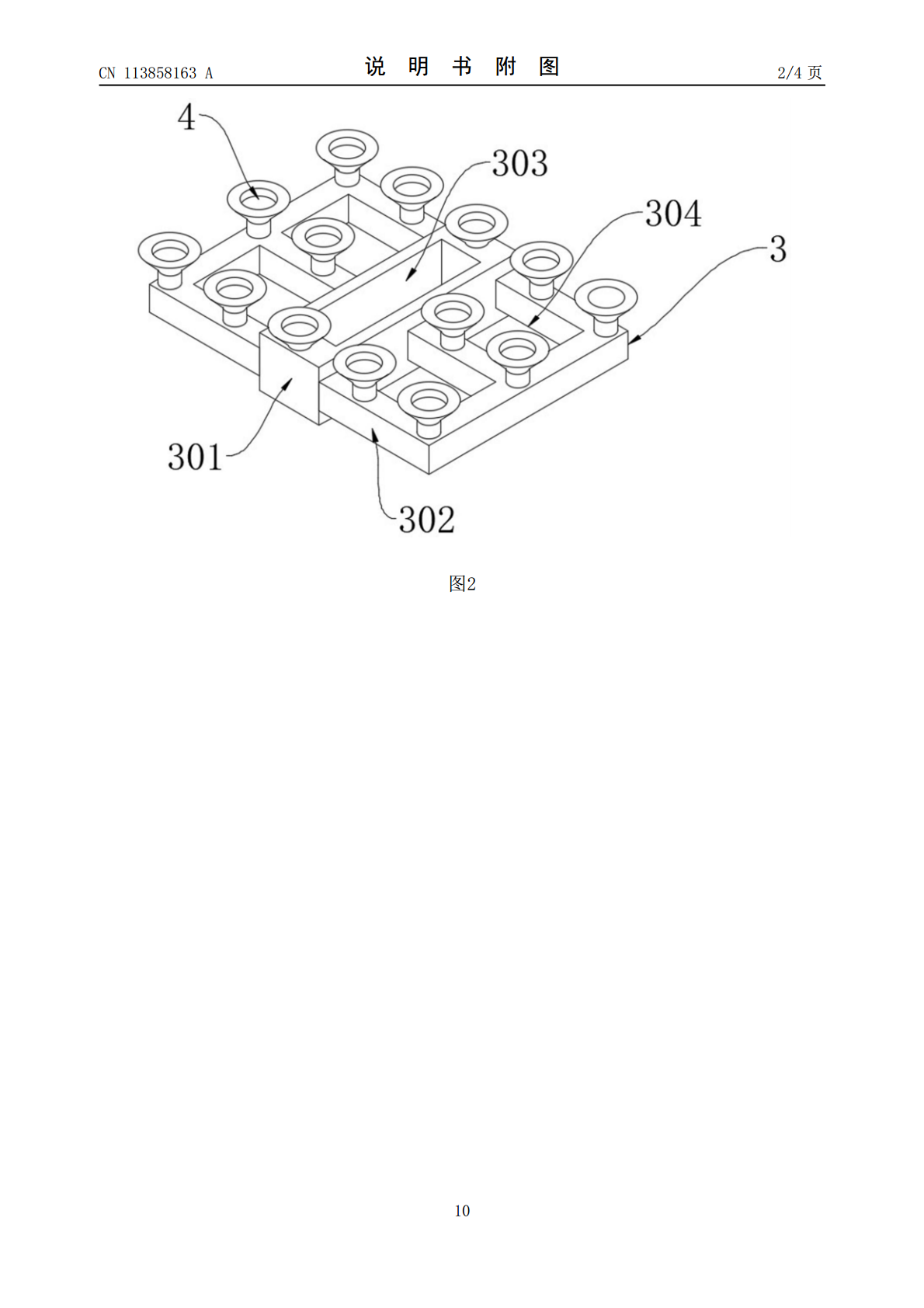
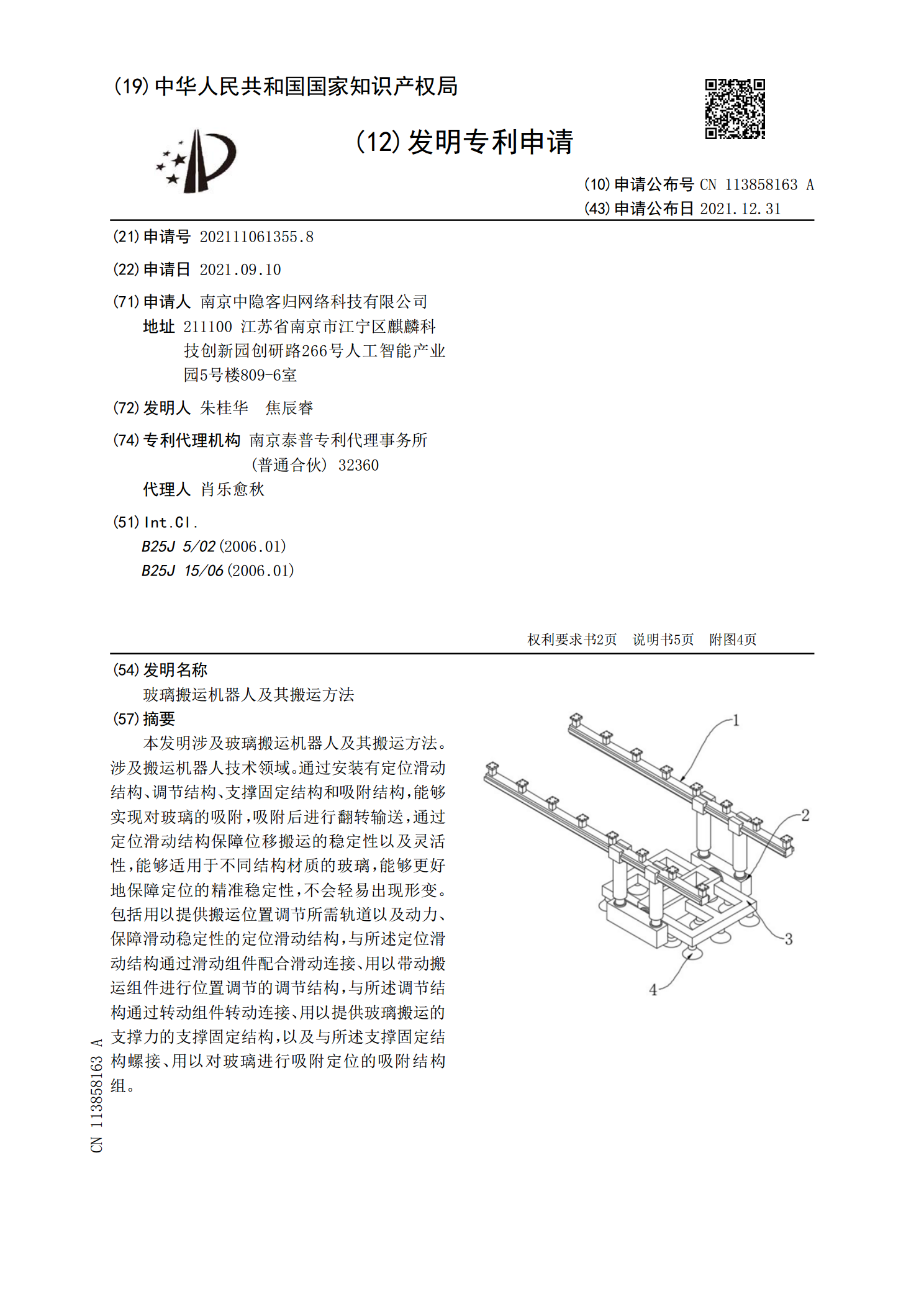
本发明涉及玻璃搬运机器人及其搬运方法。涉及搬运机器人技术领域。通过安装有定位滑动结构、调节结构、支撑固定结构和吸附结构,能够实现对玻璃的吸附,吸附后进行翻转输送,通过定位滑动结构保障位移搬运的稳定性以及灵活性,能够适用于不同结构材质的玻璃,能够更好地保障定位的精准稳定性,不会轻易出现形变。包括用以提供搬运位置调节所需轨道以及动力、保障滑动稳定性的定位滑动结构,与所述定位滑动结构通过滑动组件配合滑动连接、用以带动搬运组件进行位置调节的调节结构,与所述调节结构通过转动组件转动连接、用以提供玻璃搬运的支撑力的支

玻璃搬运机器人.pptx
CLEANROOM的对应垂直多关节型机器人ArtisSH-C系列机器人外观SH133C133KG可搬6轴多关节机器人SH133CSpec.机器人外观等级最大的可搬重量、允许扭矩可搬运玻璃基板等工件至空间狭小的箱体内可搭载高刚性的抓手→最大限度的控制工件的弯曲变形・震动较大的动作范围可对应次世代的大型玻璃基板的垂直放置布局较大的手臂动作范围可实现工件各种各样的姿势可实现玻璃基板的垂直型搬运等级最大的手臂弯曲轴(B轴)可实现±135°的动作范围高性能高性能控制装置(以电脑为基础的AX控制装置)比起监视控制,震
搬运机器人及其操作方法、车辆搬运系统.pdf
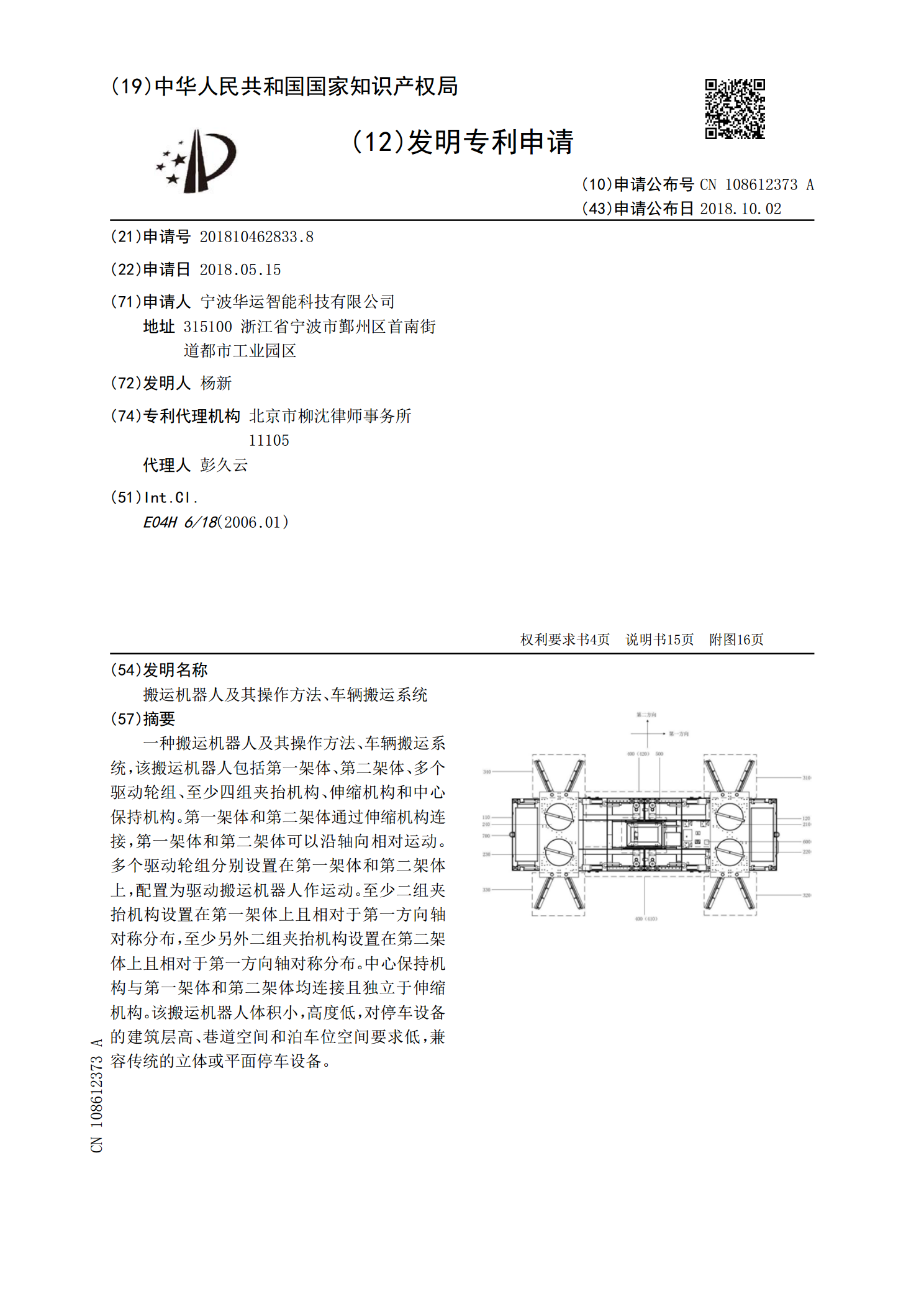
一种搬运机器人及其操作方法、车辆搬运系统,该搬运机器人包括第一架体、第二架体、多个驱动轮组、至少四组夹抬机构、伸缩机构和中心保持机构。第一架体和第二架体通过伸缩机构连接,第一架体和第二架体可以沿轴向相对运动。多个驱动轮组分别设置在第一架体和第二架体上,配置为驱动搬运机器人作运动。至少二组夹抬机构设置在第一架体上且相对于第一方向轴对称分布,至少另外二组夹抬机构设置在第二架体上且相对于第一方向轴对称分布。中心保持机构与第一架体和第二架体均连接且独立于伸缩机构。该搬运机器人体积小,高度低,对停车设备的建筑层高、
一种货物搬运机器人及其搬运方法.pdf
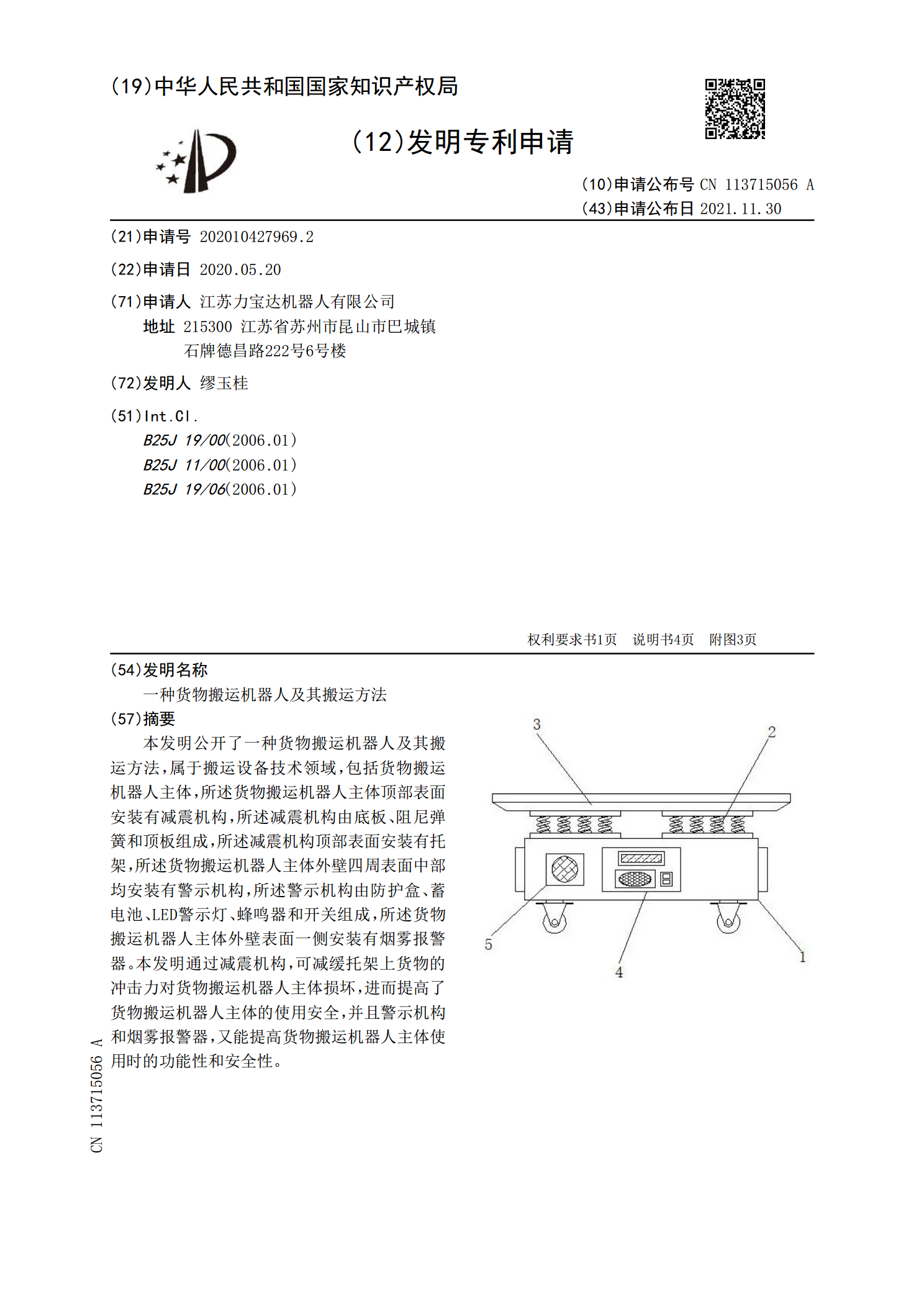
本发明公开了一种货物搬运机器人及其搬运方法,属于搬运设备技术领域,包括货物搬运机器人主体,所述货物搬运机器人主体顶部表面安装有减震机构,所述减震机构由底板、阻尼弹簧和顶板组成,所述减震机构顶部表面安装有托架,所述货物搬运机器人主体外壁四周表面中部均安装有警示机构,所述警示机构由防护盒、蓄电池、LED警示灯、蜂鸣器和开关组成,所述货物搬运机器人主体外壁表面一侧安装有烟雾报警器。本发明通过减震机构,可减缓托架上货物的冲击力对货物搬运机器人主体损坏,进而提高了货物搬运机器人主体的使用安全,并且警示机构和烟雾报警
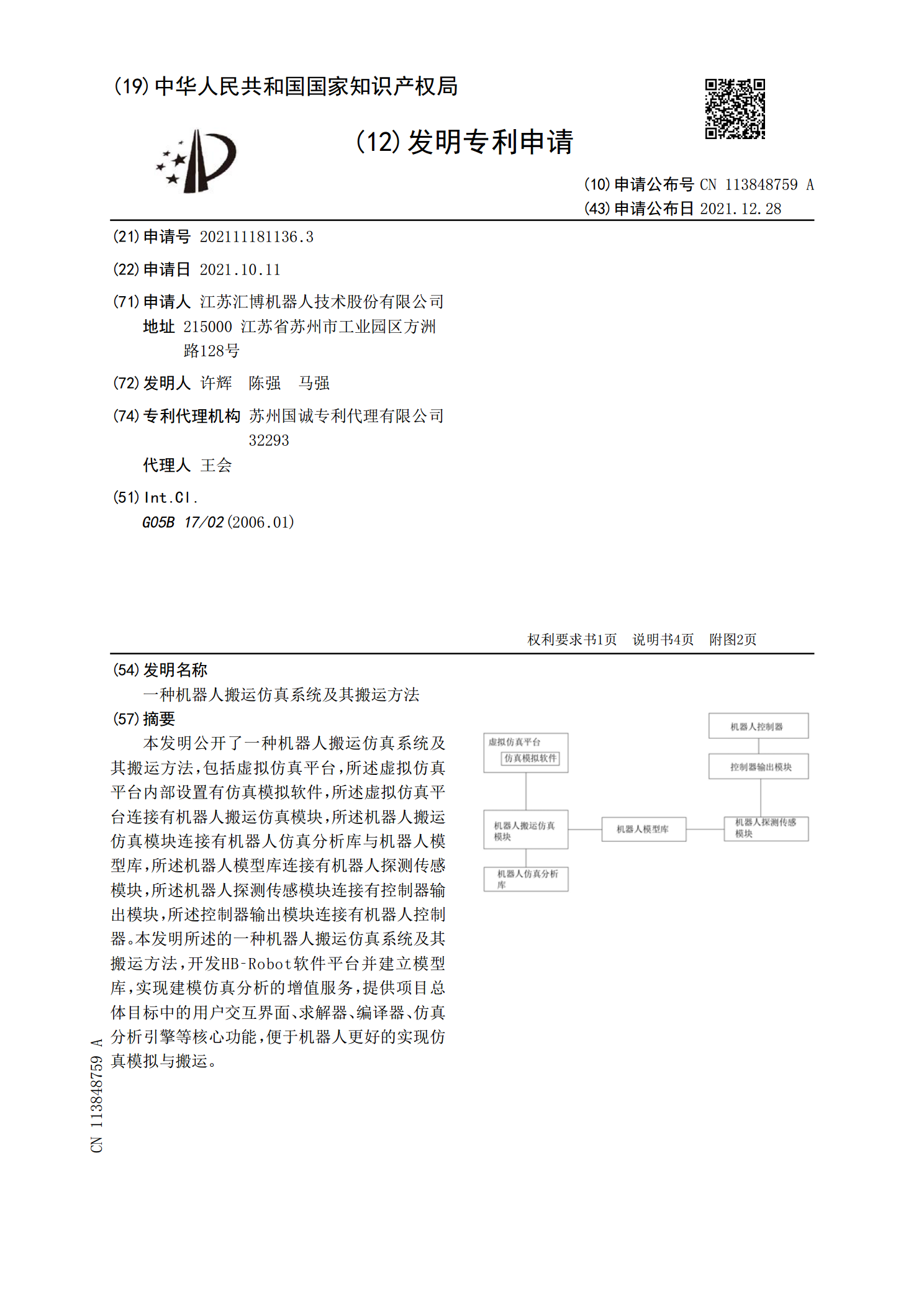
一种机器人搬运仿真系统及其搬运方法.pdf
本发明公开了一种机器人搬运仿真系统及其搬运方法,包括虚拟仿真平台,所述虚拟仿真平台内部设置有仿真模拟软件,所述虚拟仿真平台连接有机器人搬运仿真模块,所述机器人搬运仿真模块连接有机器人仿真分析库与机器人模型库,所述机器人模型库连接有机器人探测传感模块,所述机器人探测传感模块连接有控制器输出模块,所述控制器输出模块连接有机器人控制器。本发明所述的一种机器人搬运仿真系统及其搬运方法,开发HB‑Robot软件平台并建立模型库,实现建模仿真分析的增值服务,提供项目总体目标中的用户交互界面、求解器、编译器、仿真分析引