
搬运机器人及其操作方法、车辆搬运系统.pdf

书生****22


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共36页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
搬运机器人及其操作方法、车辆搬运系统.pdf
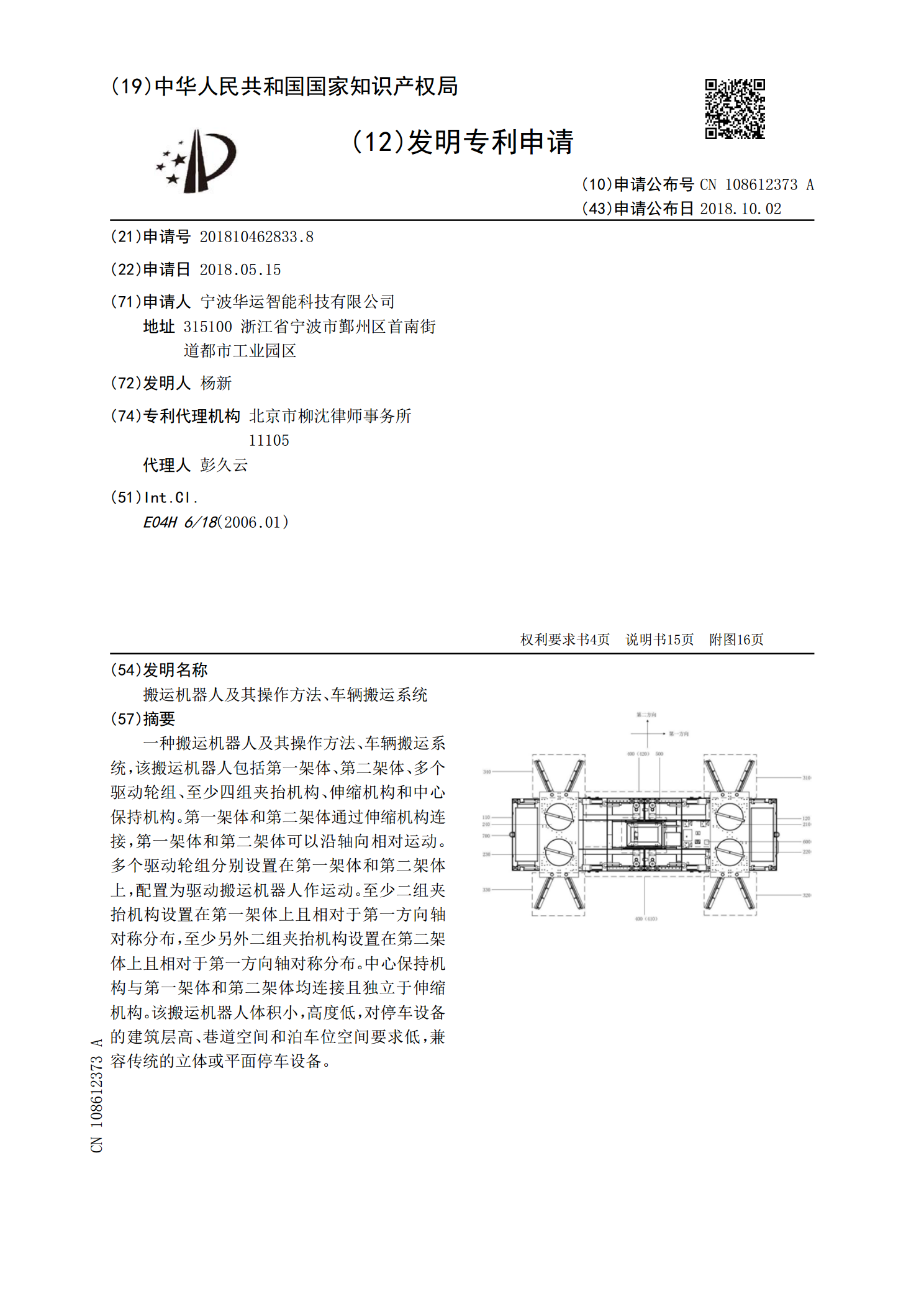
一种搬运机器人及其操作方法、车辆搬运系统,该搬运机器人包括第一架体、第二架体、多个驱动轮组、至少四组夹抬机构、伸缩机构和中心保持机构。第一架体和第二架体通过伸缩机构连接,第一架体和第二架体可以沿轴向相对运动。多个驱动轮组分别设置在第一架体和第二架体上,配置为驱动搬运机器人作运动。至少二组夹抬机构设置在第一架体上且相对于第一方向轴对称分布,至少另外二组夹抬机构设置在第二架体上且相对于第一方向轴对称分布。中心保持机构与第一架体和第二架体均连接且独立于伸缩机构。该搬运机器人体积小,高度低,对停车设备的建筑层高、
车辆搬运器、车辆搬运系统以及车辆搬运方法.pdf
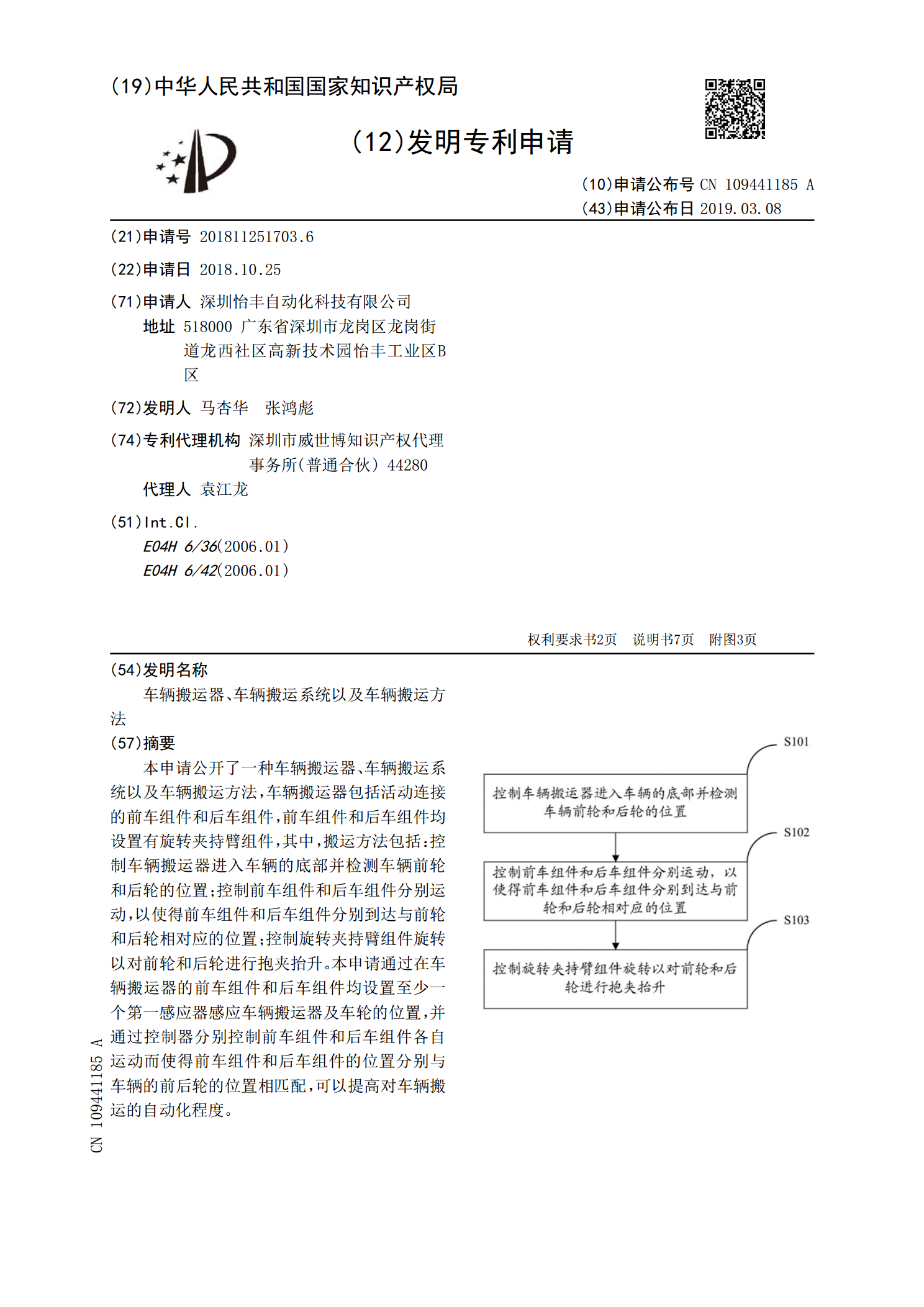
本申请公开了一种车辆搬运器、车辆搬运系统以及车辆搬运方法,车辆搬运器包括活动连接的前车组件和后车组件,前车组件和后车组件均设置有旋转夹持臂组件,其中,搬运方法包括:控制车辆搬运器进入车辆的底部并检测车辆前轮和后轮的位置;控制前车组件和后车组件分别运动,以使得前车组件和后车组件分别到达与前轮和后轮相对应的位置;控制旋转夹持臂组件旋转以对前轮和后轮进行抱夹抬升。本申请通过在车辆搬运器的前车组件和后车组件均设置至少一个第一感应器感应车辆搬运器及车轮的位置,并通过控制器分别控制前车组件和后车组件各自运动而使得前车
车辆搬运器及应用其的车辆搬运系统.pdf
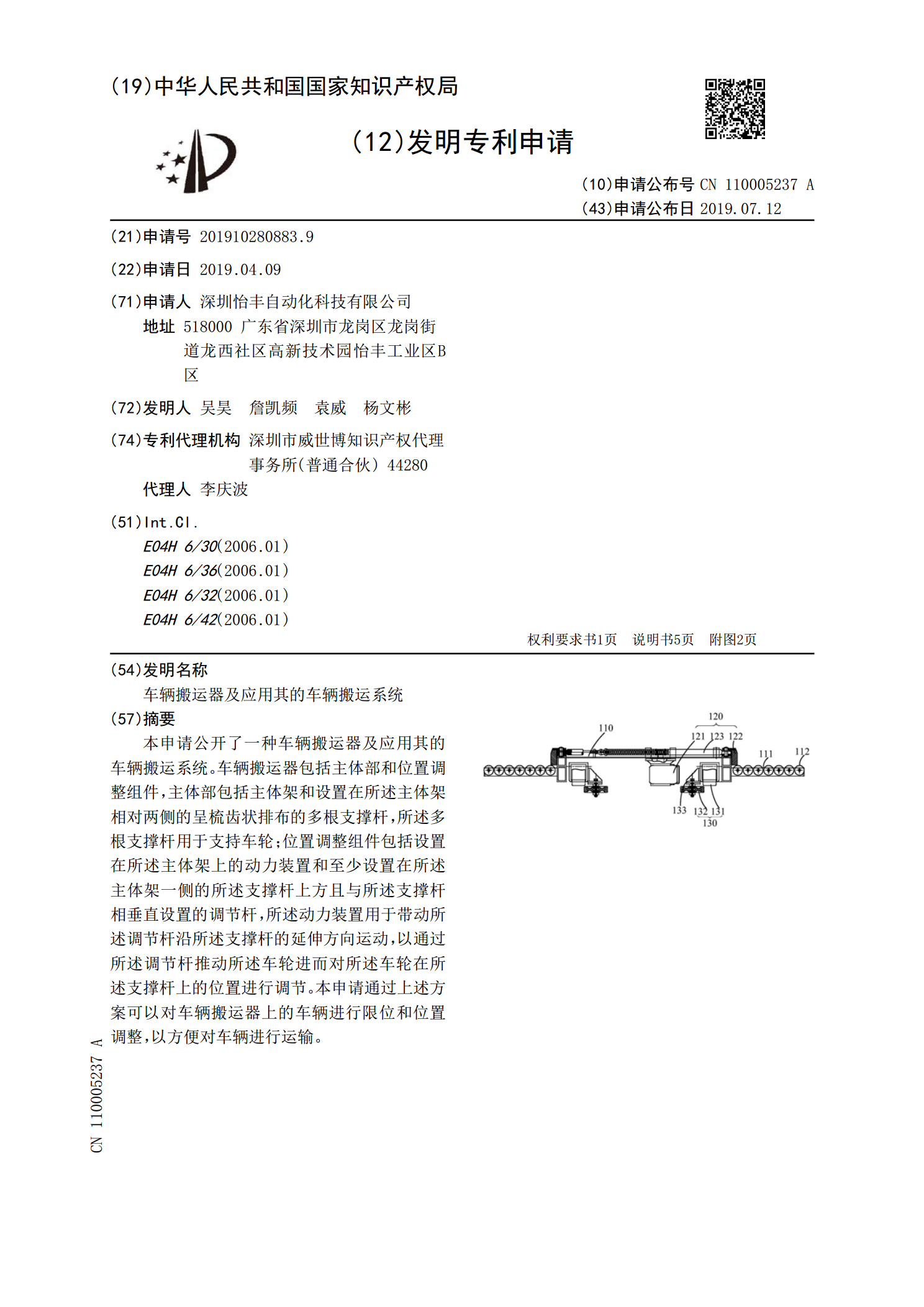
本申请公开了一种车辆搬运器及应用其的车辆搬运系统。车辆搬运器包括主体部和位置调整组件,主体部包括主体架和设置在所述主体架相对两侧的呈梳齿状排布的多根支撑杆,所述多根支撑杆用于支持车轮;位置调整组件包括设置在所述主体架上的动力装置和至少设置在所述主体架一侧的所述支撑杆上方且与所述支撑杆相垂直设置的调节杆,所述动力装置用于带动所述调节杆沿所述支撑杆的延伸方向运动,以通过所述调节杆推动所述车轮进而对所述车轮在所述支撑杆上的位置进行调节。本申请通过上述方案可以对车辆搬运器上的车辆进行限位和位置调整,以方便对车辆进
一种搬运小车、车辆搬运器及其充电系统.pdf
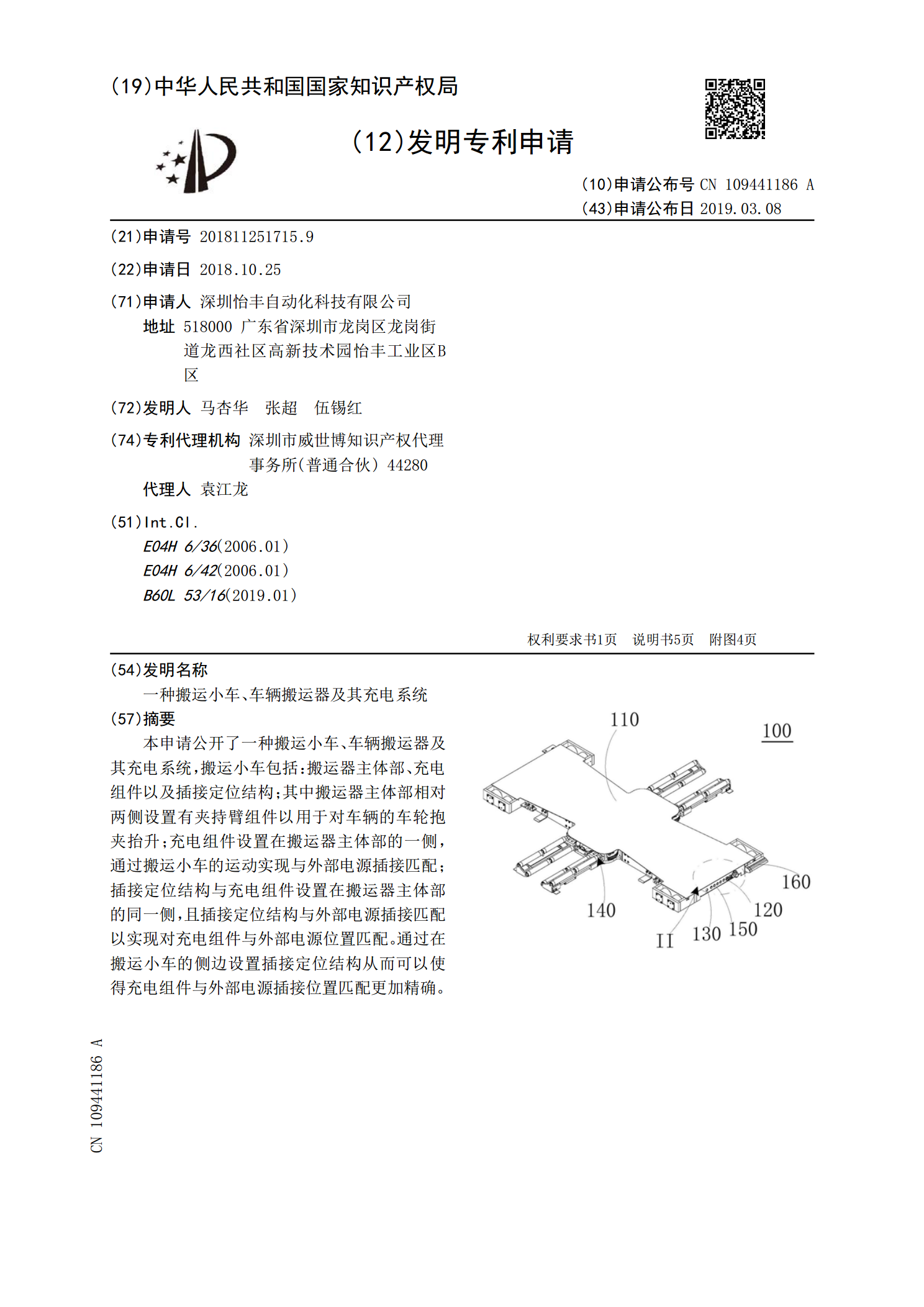
本申请公开了一种搬运小车、车辆搬运器及其充电系统,搬运小车包括:搬运器主体部、充电组件以及插接定位结构;其中搬运器主体部相对两侧设置有夹持臂组件以用于对车辆的车轮抱夹抬升;充电组件设置在搬运器主体部的一侧,通过搬运小车的运动实现与外部电源插接匹配;插接定位结构与充电组件设置在搬运器主体部的同一侧,且插接定位结构与外部电源插接匹配以实现对充电组件与外部电源位置匹配。通过在搬运小车的侧边设置插接定位结构从而可以使得充电组件与外部电源插接位置匹配更加精确。
一种机器人搬运仿真系统及其搬运方法.pdf
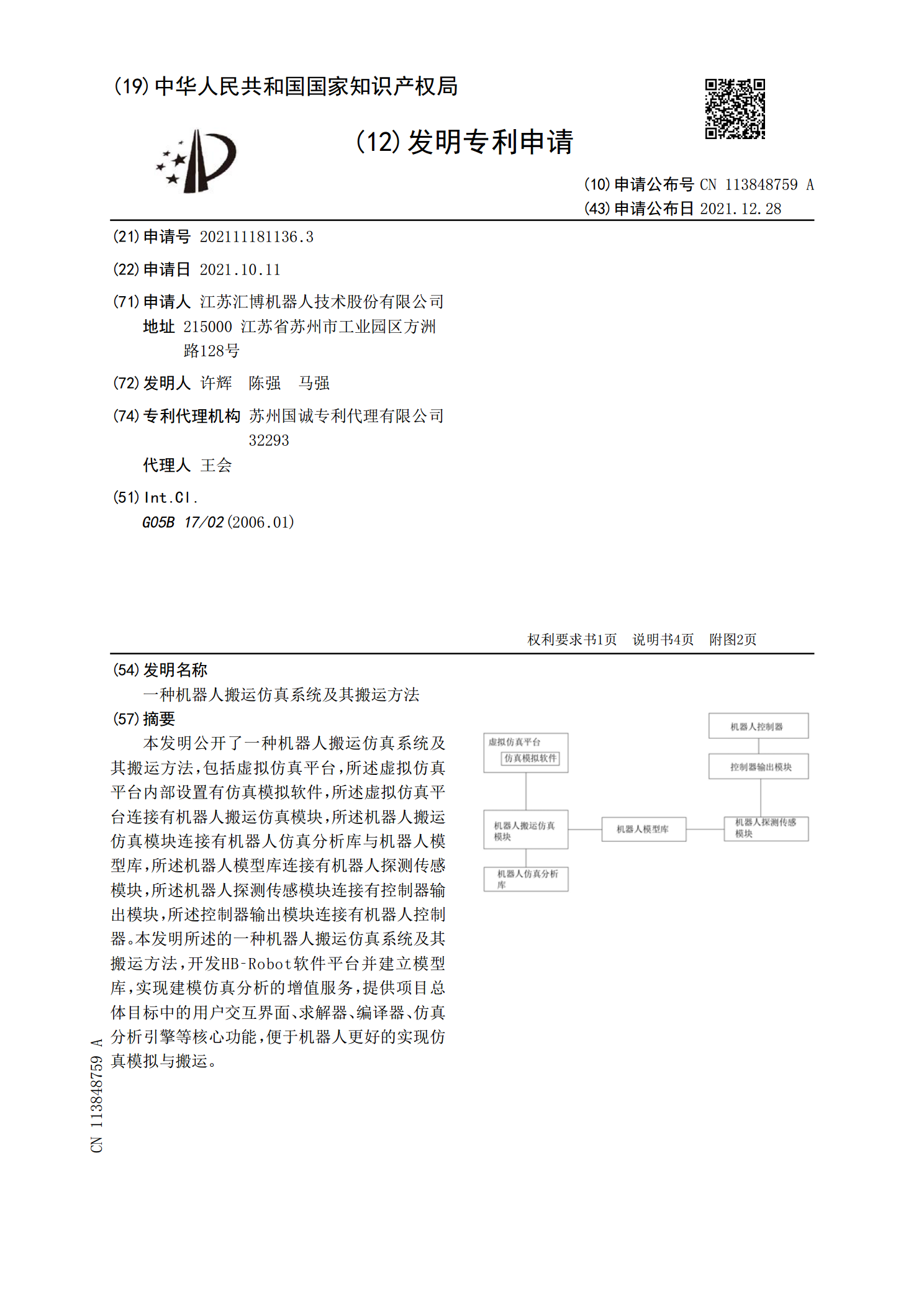
本发明公开了一种机器人搬运仿真系统及其搬运方法,包括虚拟仿真平台,所述虚拟仿真平台内部设置有仿真模拟软件,所述虚拟仿真平台连接有机器人搬运仿真模块,所述机器人搬运仿真模块连接有机器人仿真分析库与机器人模型库,所述机器人模型库连接有机器人探测传感模块,所述机器人探测传感模块连接有控制器输出模块,所述控制器输出模块连接有机器人控制器。本发明所述的一种机器人搬运仿真系统及其搬运方法,开发HB‑Robot软件平台并建立模型库,实现建模仿真分析的增值服务,提供项目总体目标中的用户交互界面、求解器、编译器、仿真分析引