
基于微分平坦和自抗扰的四轮转向汽车轨迹跟踪控制方法.pdf

夏萍****文章

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于微分平坦和自抗扰的四轮转向汽车轨迹跟踪控制方法.pdf
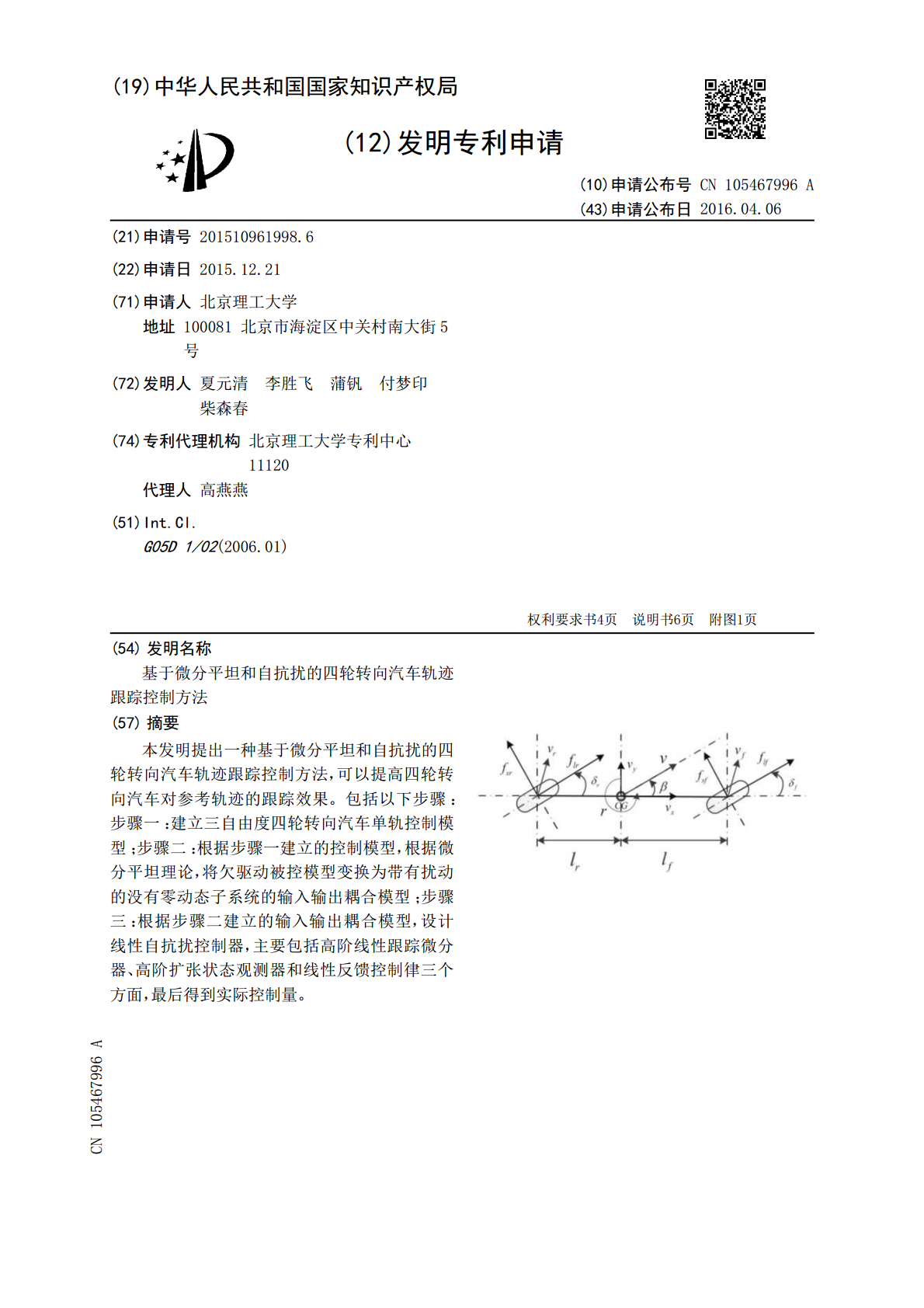
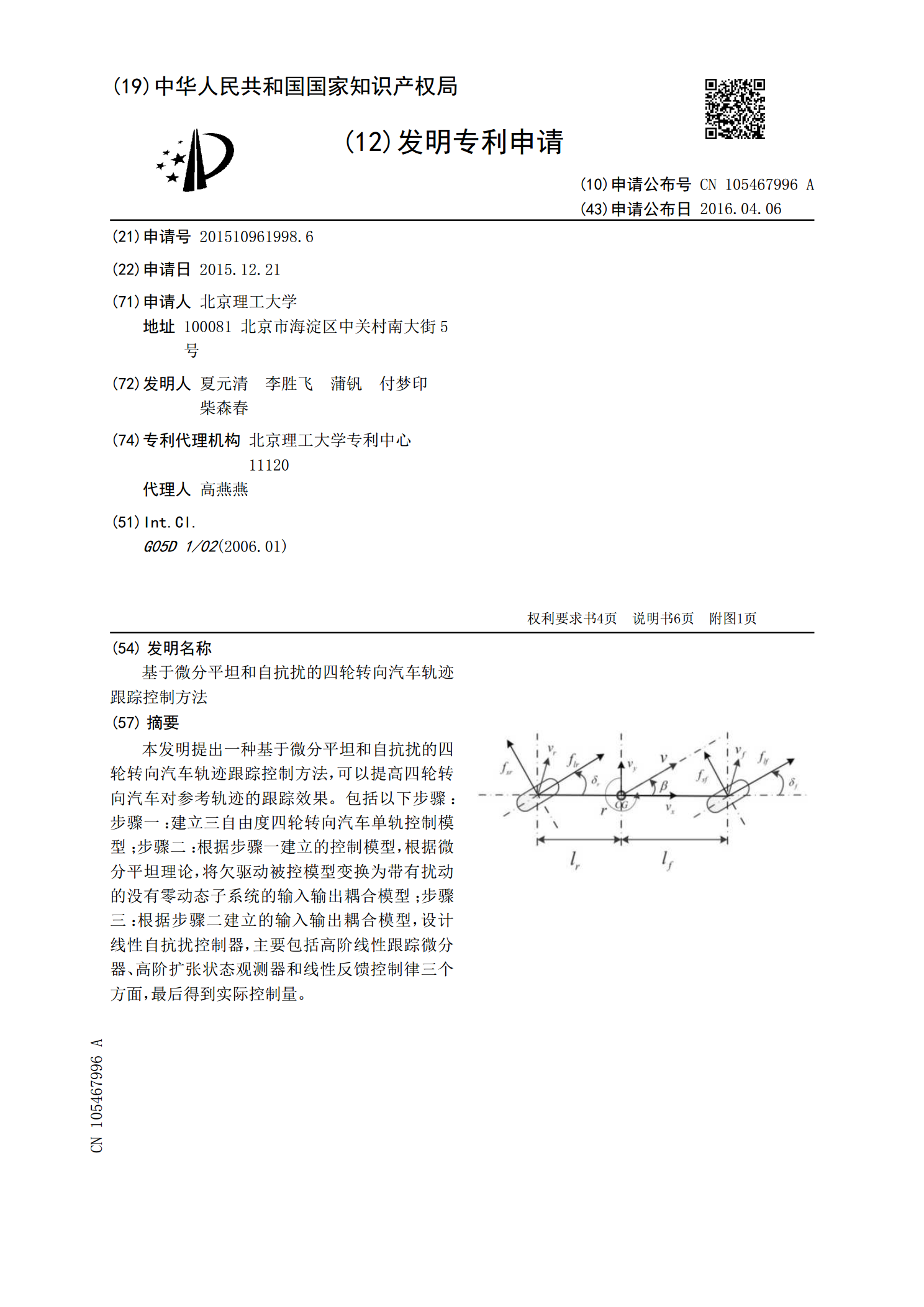
本发明提出一种基于微分平坦和自抗扰的四轮转向汽车轨迹跟踪控制方法,可以提高四轮转向汽车对参考轨迹的跟踪效果。包括以下步骤:步骤一:建立三自由度四轮转向汽车单轨控制模型;步骤二:根据步骤一建立的控制模型,根据微分平坦理论,将欠驱动被控模型变换为带有扰动的没有零动态子系统的输入输出耦合模型;步骤三:根据步骤二建立的输入输出耦合模型,设计线性自抗扰控制器,主要包括高阶线性跟踪微分器、高阶扩张状态观测器和线性反馈控制律三个方面,最后得到实际控制量。
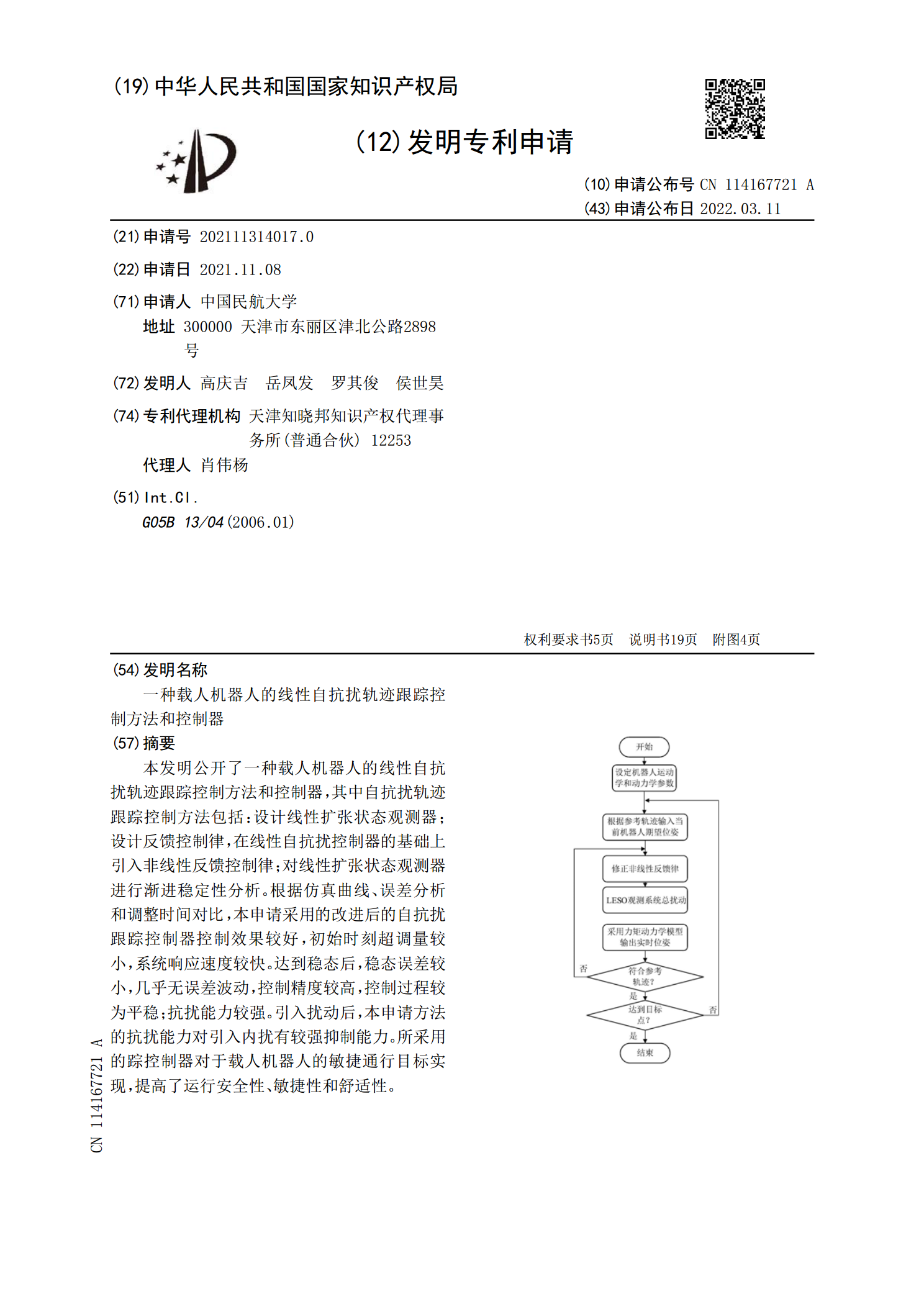
一种载人机器人的线性自抗扰轨迹跟踪控制方法和控制器.pdf
本发明公开了一种载人机器人的线性自抗扰轨迹跟踪控制方法和控制器,其中自抗扰轨迹跟踪控制方法包括:设计线性扩张状态观测器;设计反馈控制律,在线性自抗扰控制器的基础上引入非线性反馈控制律;对线性扩张状态观测器进行渐进稳定性分析。根据仿真曲线、误差分析和调整时间对比,本申请采用的改进后的自抗扰跟踪控制器控制效果较好,初始时刻超调量较小,系统响应速度较快。达到稳态后,稳态误差较小,几乎无误差波动,控制精度较高,控制过程较为平稳;抗扰能力较强。引入扰动后,本申请方法的抗扰能力对引入内扰有较强抑制能力。所采用的踪控制
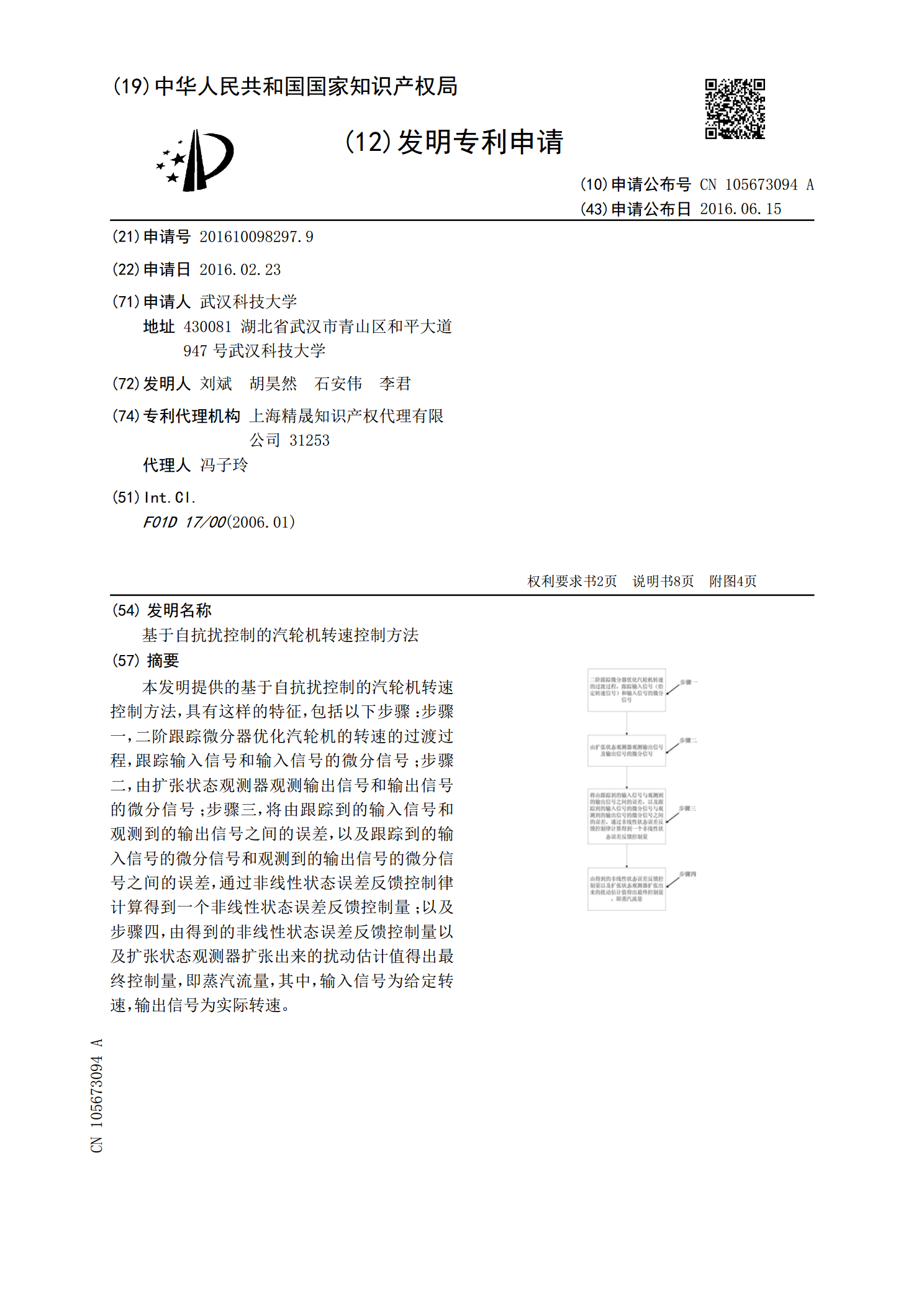
基于自抗扰控制的汽轮机转速控制方法.pdf
本发明提供的基于自抗扰控制的汽轮机转速控制方法,具有这样的特征,包括以下步骤:步骤一,二阶跟踪微分器优化汽轮机的转速的过渡过程,跟踪输入信号和输入信号的微分信号;步骤二,由扩张状态观测器观测输出信号和输出信号的微分信号;步骤三,将由跟踪到的输入信号和观测到的输出信号之间的误差,以及跟踪到的输入信号的微分信号和观测到的输出信号的微分信号之间的误差,通过非线性状态误差反馈控制律计算得到一个非线性状态误差反馈控制量;以及步骤四,由得到的非线性状态误差反馈控制量以及扩张状态观测器扩张出来的扰动估计值得出最终控制量
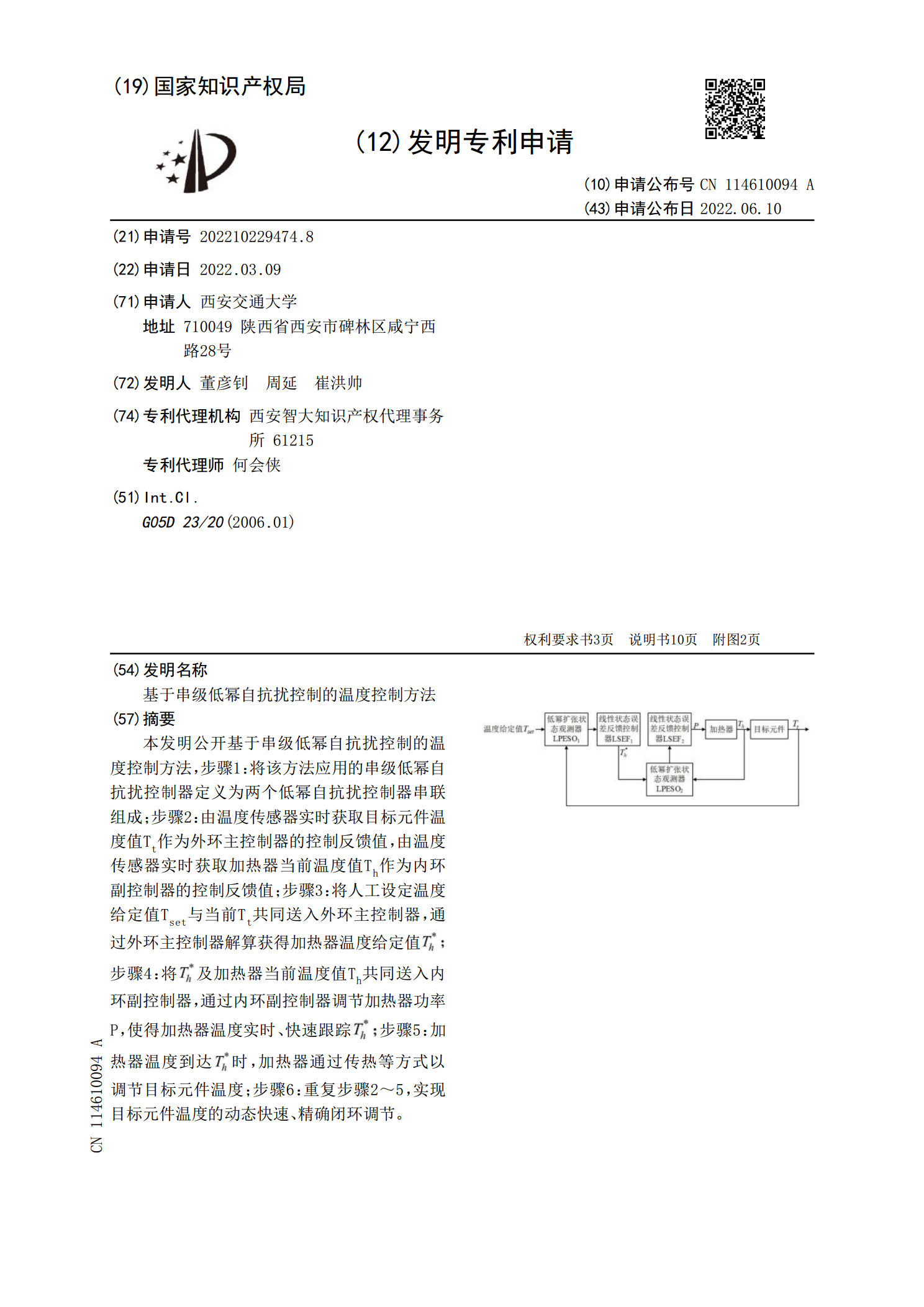
基于串级低幂自抗扰控制的温度控制方法.pdf
本发明公开基于串级低幂自抗扰控制的温度控制方法,步骤1:将该方法应用的串级低幂自抗扰控制器定义为两个低幂自抗扰控制器串联组成;步骤2:由温度传感器实时获取目标元件温度值T<base:Sub>t</base:Sub>作为外环主控制器的控制反馈值,由温度传感器实时获取加热器当前温度值T<base:Sub>h</base:Sub>作为内环副控制器的控制反馈值;步骤3:将人工设定温度给定值T<base:Sub>set</base:Sub>与当前T<base:Sub>t</base:Sub>共同送入外环主控制器,通
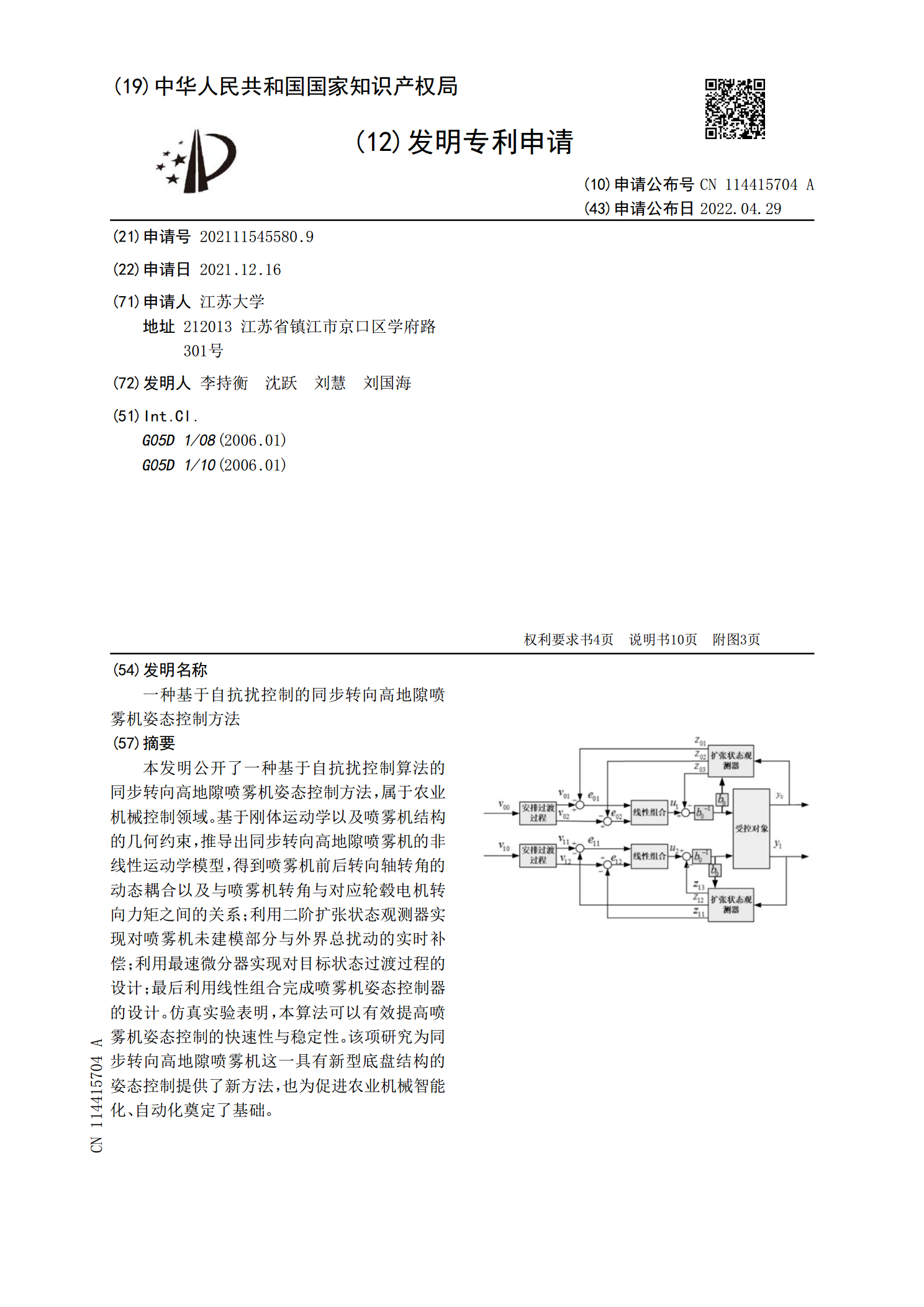
一种基于自抗扰控制的同步转向高地隙喷雾机姿态控制方法.pdf
本发明公开了一种基于自抗扰控制算法的同步转向高地隙喷雾机姿态控制方法,属于农业机械控制领域。基于刚体运动学以及喷雾机结构的几何约束,推导出同步转向高地隙喷雾机的非线性运动学模型,得到喷雾机前后转向轴转角的动态耦合以及与喷雾机转角与对应轮毂电机转向力矩之间的关系;利用二阶扩张状态观测器实现对喷雾机未建模部分与外界总扰动的实时补偿;利用最速微分器实现对目标状态过渡过程的设计;最后利用线性组合完成喷雾机姿态控制器的设计。仿真实验表明,本算法可以有效提高喷雾机姿态控制的快速性与稳定性。该项研究为同步转向高地隙喷雾