
一种载人机器人的线性自抗扰轨迹跟踪控制方法和控制器.pdf

An****70

1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种载人机器人的线性自抗扰轨迹跟踪控制方法和控制器.pdf
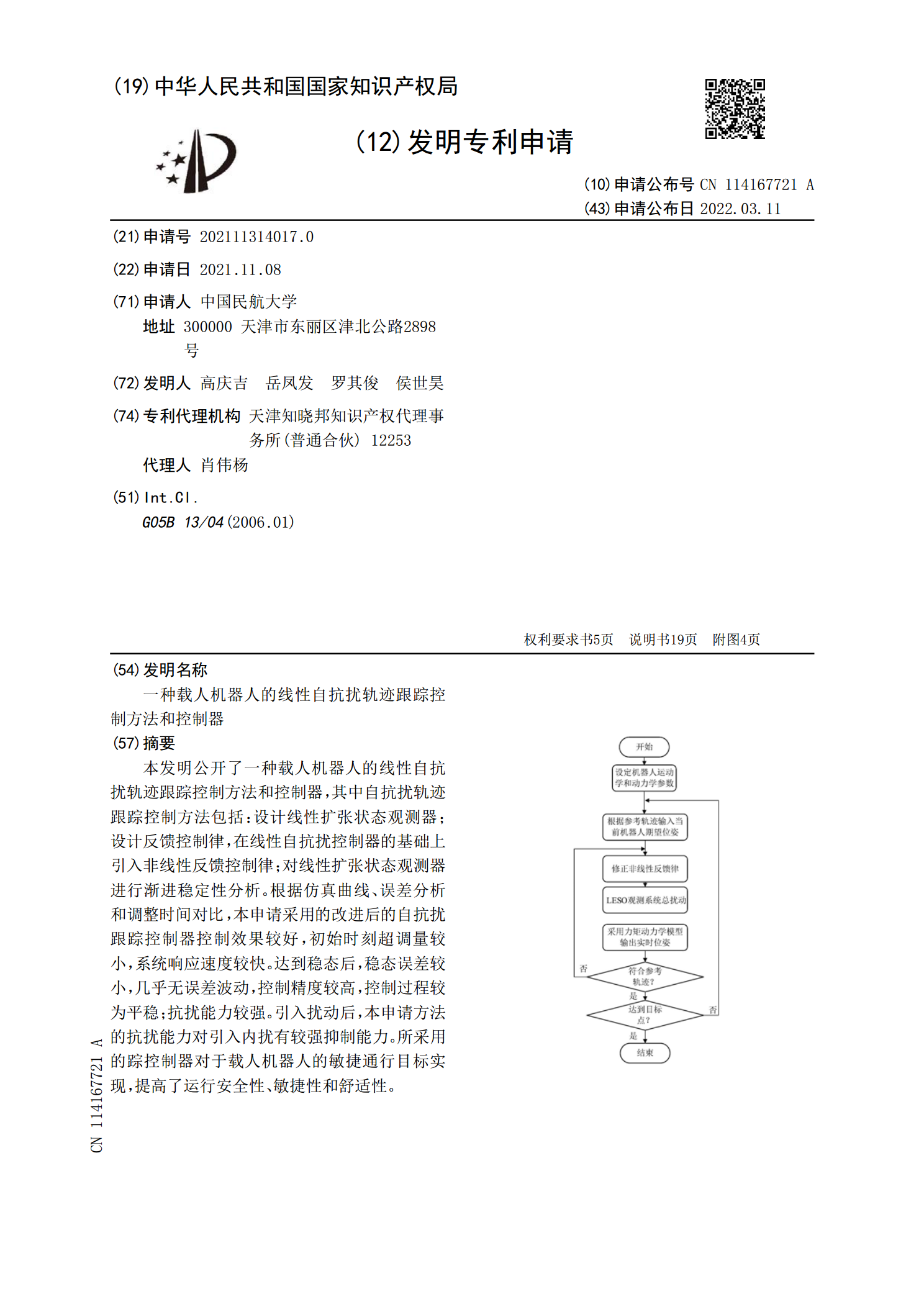
本发明公开了一种载人机器人的线性自抗扰轨迹跟踪控制方法和控制器,其中自抗扰轨迹跟踪控制方法包括:设计线性扩张状态观测器;设计反馈控制律,在线性自抗扰控制器的基础上引入非线性反馈控制律;对线性扩张状态观测器进行渐进稳定性分析。根据仿真曲线、误差分析和调整时间对比,本申请采用的改进后的自抗扰跟踪控制器控制效果较好,初始时刻超调量较小,系统响应速度较快。达到稳态后,稳态误差较小,几乎无误差波动,控制精度较高,控制过程较为平稳;抗扰能力较强。引入扰动后,本申请方法的抗扰能力对引入内扰有较强抑制能力。所采用的踪控制
一种基于线性自抗扰的移动机器人速度解耦抗扰控制器.pdf
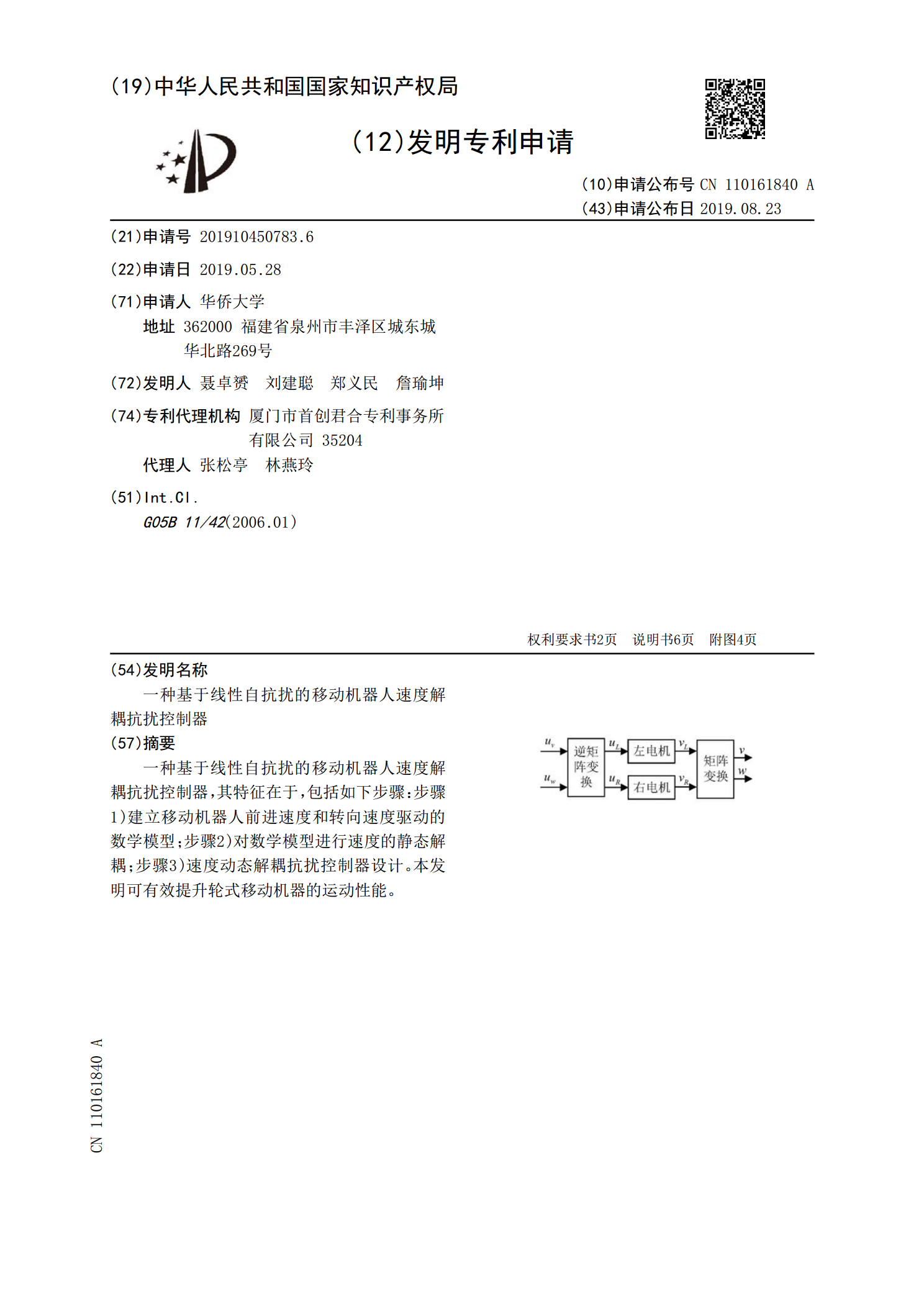
一种基于线性自抗扰的移动机器人速度解耦抗扰控制器,其特征在于,包括如下步骤:步骤1)建立移动机器人前进速度和转向速度驱动的数学模型;步骤2)对数学模型进行速度的静态解耦;步骤3)速度动态解耦抗扰控制器设计。本发明可有效提升轮式移动机器的运动性能。
基于微分平坦和自抗扰的四轮转向汽车轨迹跟踪控制方法.pdf
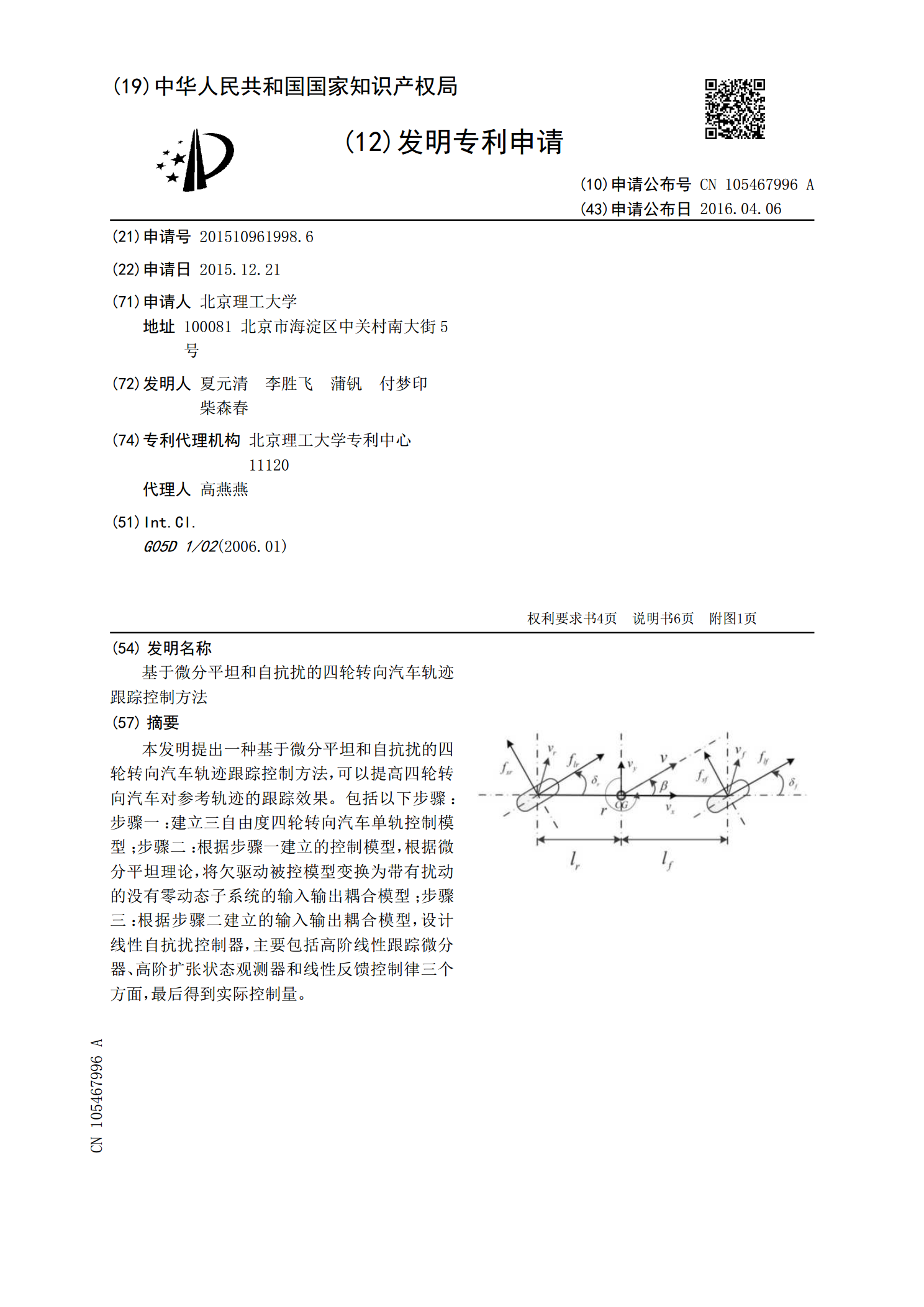
本发明提出一种基于微分平坦和自抗扰的四轮转向汽车轨迹跟踪控制方法,可以提高四轮转向汽车对参考轨迹的跟踪效果。包括以下步骤:步骤一:建立三自由度四轮转向汽车单轨控制模型;步骤二:根据步骤一建立的控制模型,根据微分平坦理论,将欠驱动被控模型变换为带有扰动的没有零动态子系统的输入输出耦合模型;步骤三:根据步骤二建立的输入输出耦合模型,设计线性自抗扰控制器,主要包括高阶线性跟踪微分器、高阶扩张状态观测器和线性反馈控制律三个方面,最后得到实际控制量。

一种基于高通滤波线性反馈控制器优化的自抗扰控制方法.pdf
本发明涉及电机控制技术领域,具体的是一种基于高通滤波线性反馈控制器优化的自抗扰控制方法,包括以下步骤:S1、基于电机运动方程得到状态空间方程,将电机驱动系统中的总扰动扩展为新的状态变量,根据新的状态变量构建新的状态空间方程;S2、由新的状态空间方程构建扩张状态观测器,利用观测器观测出的转速反馈值和总扰动,利用总扰动进行前馈补偿;S3、设计高通滤波器、线性反馈控制器实现转速参考信号跟踪,抑制由于电机驱动系统内部扰动造成的转速周期性波动。本发明保留了线性ESO的整定参数较少的特点,减小了转速波动,降低了电机低
基于线性自抗扰的固液变推力发动机控制器和控制方法.pdf
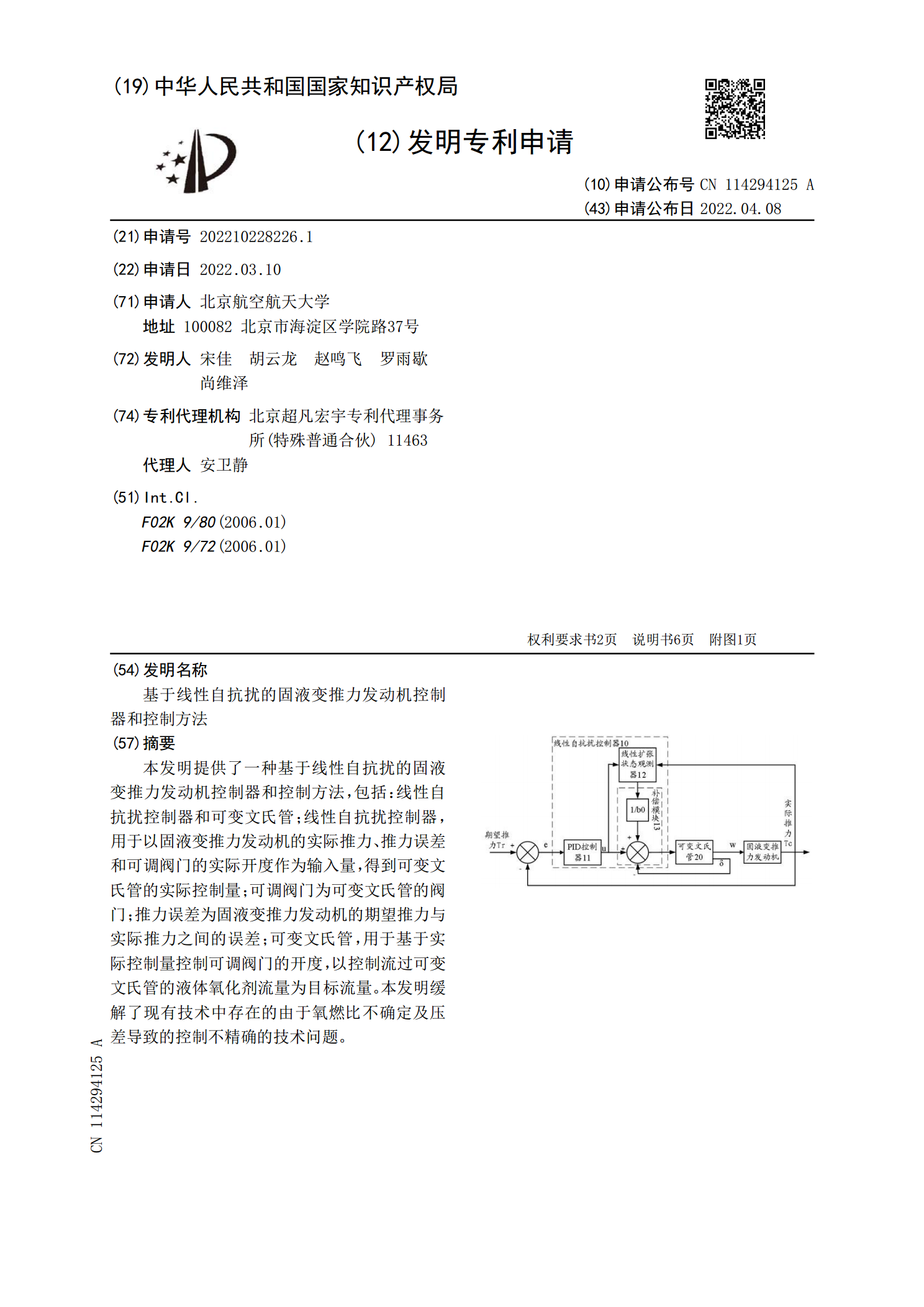
本发明提供了一种基于线性自抗扰的固液变推力发动机控制器和控制方法,包括:线性自抗扰控制器和可变文氏管;线性自抗扰控制器,用于以固液变推力发动机的实际推力、推力误差和可调阀门的实际开度作为输入量,得到可变文氏管的实际控制量;可调阀门为可变文氏管的阀门;推力误差为固液变推力发动机的期望推力与实际推力之间的误差;可变文氏管,用于基于实际控制量控制可调阀门的开度,以控制流过可变文氏管的液体氧化剂流量为目标流量。本发明缓解了现有技术中存在的由于氧燃比不确定及压差导致的控制不精确的技术问题。