
一种基于自抗扰控制的同步转向高地隙喷雾机姿态控制方法.pdf

Ch****91


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于自抗扰控制的同步转向高地隙喷雾机姿态控制方法.pdf
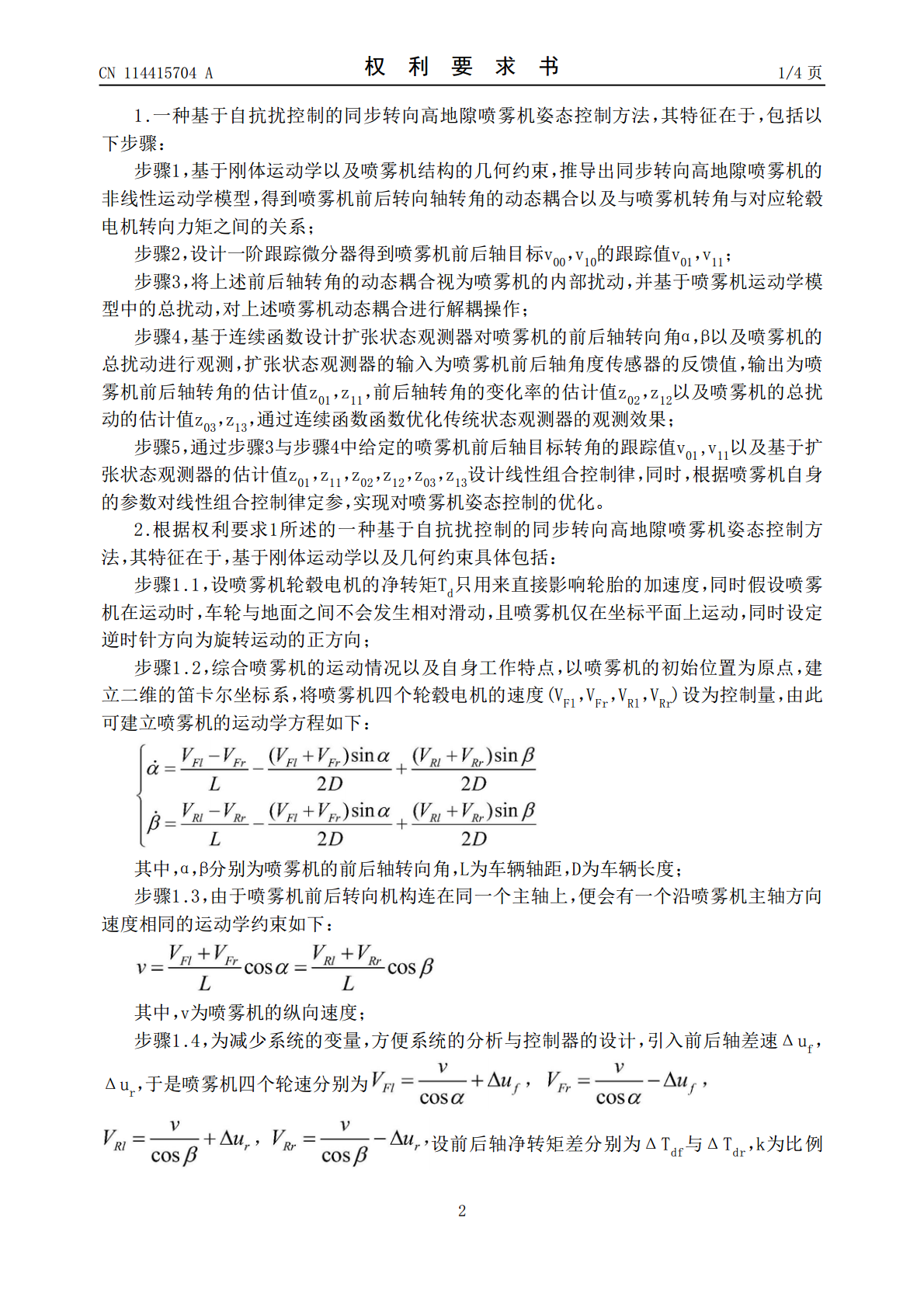
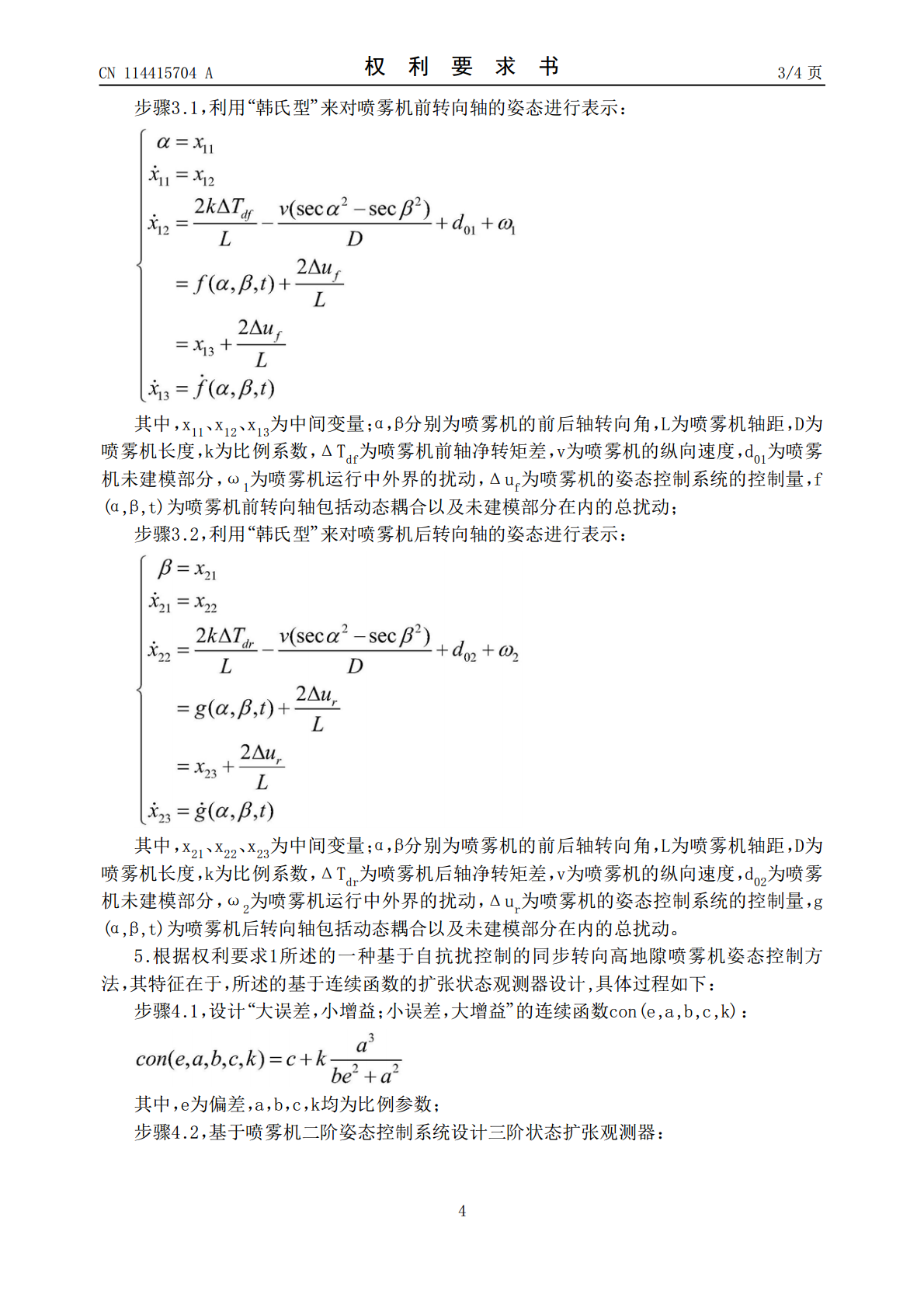
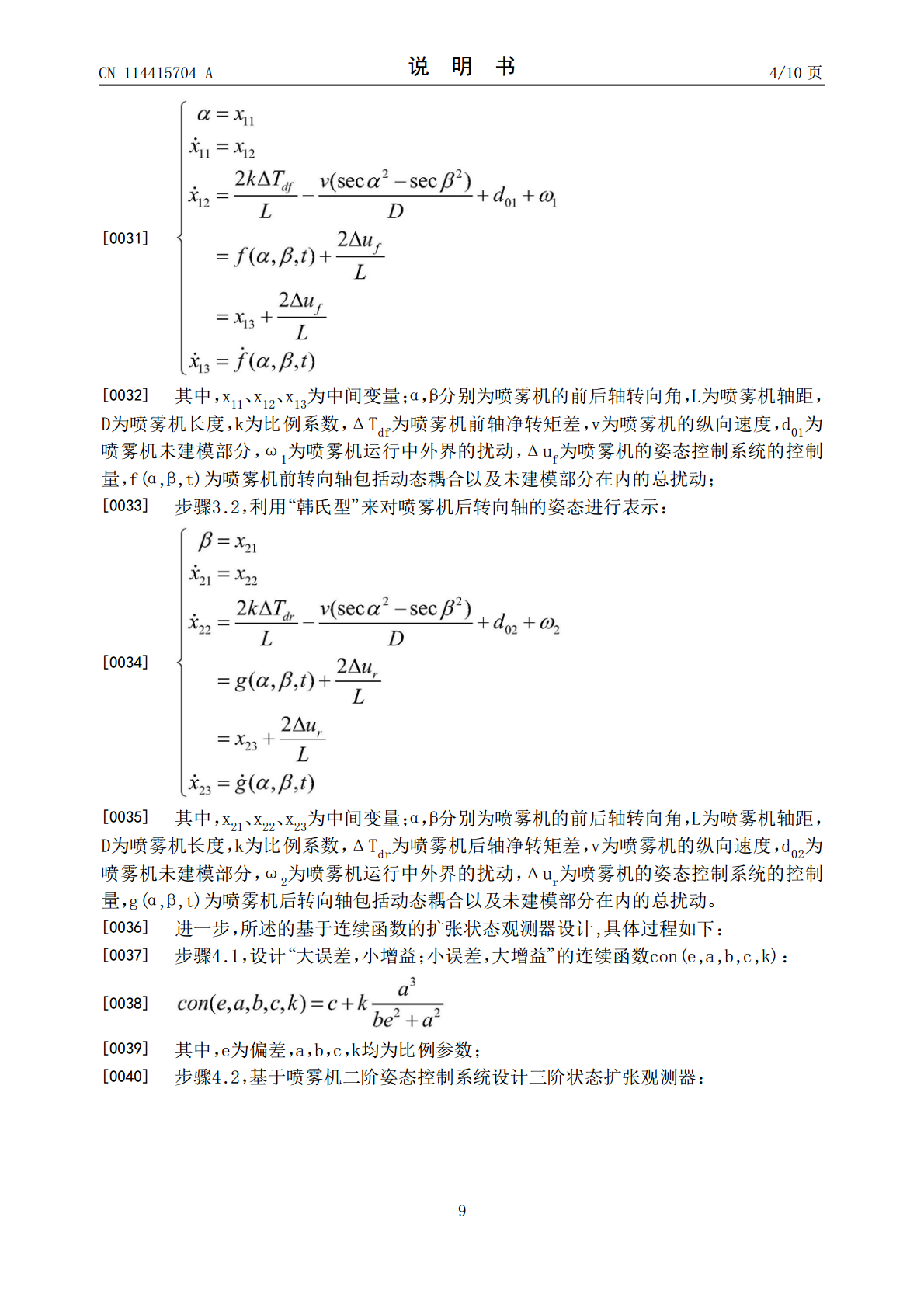
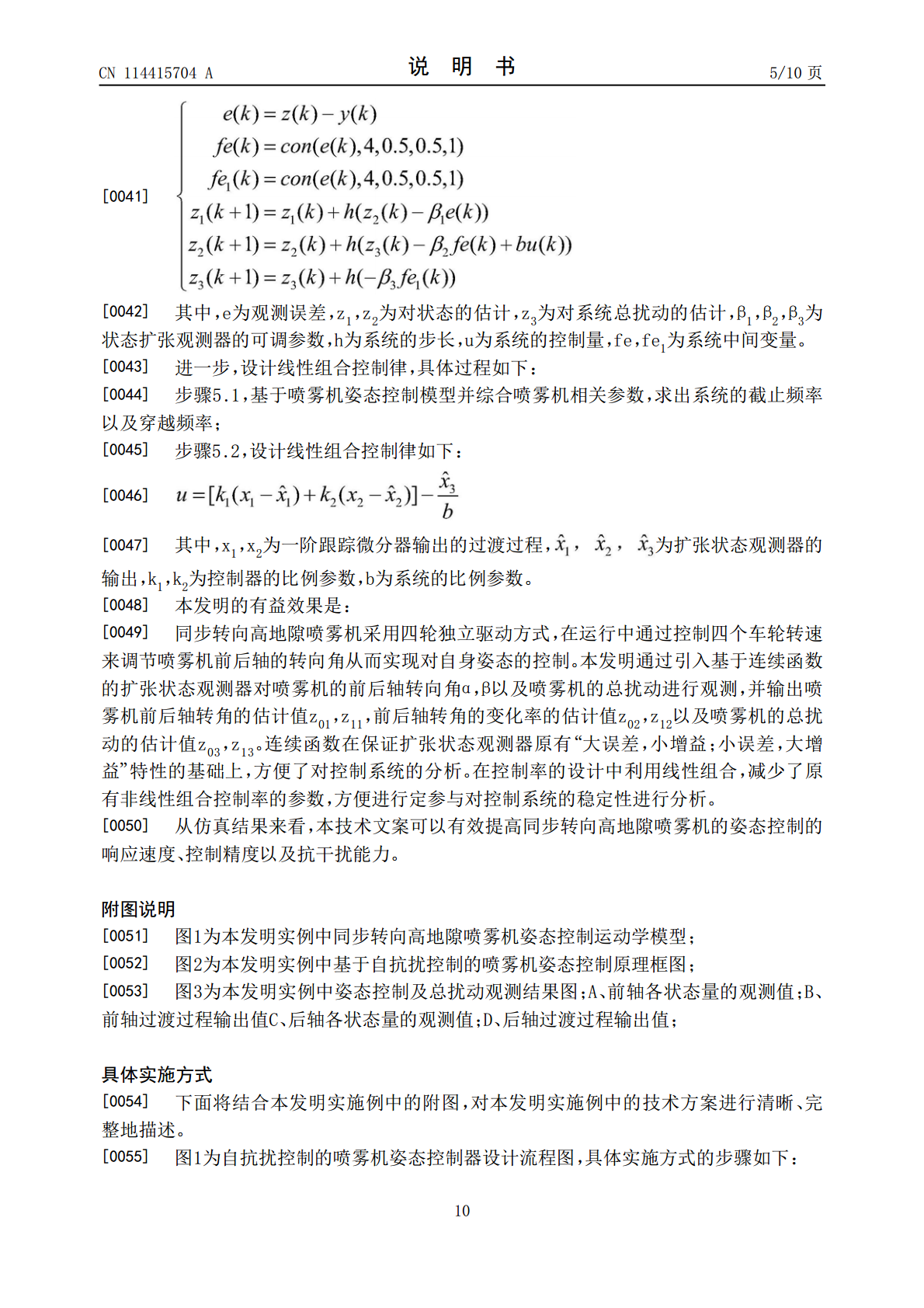
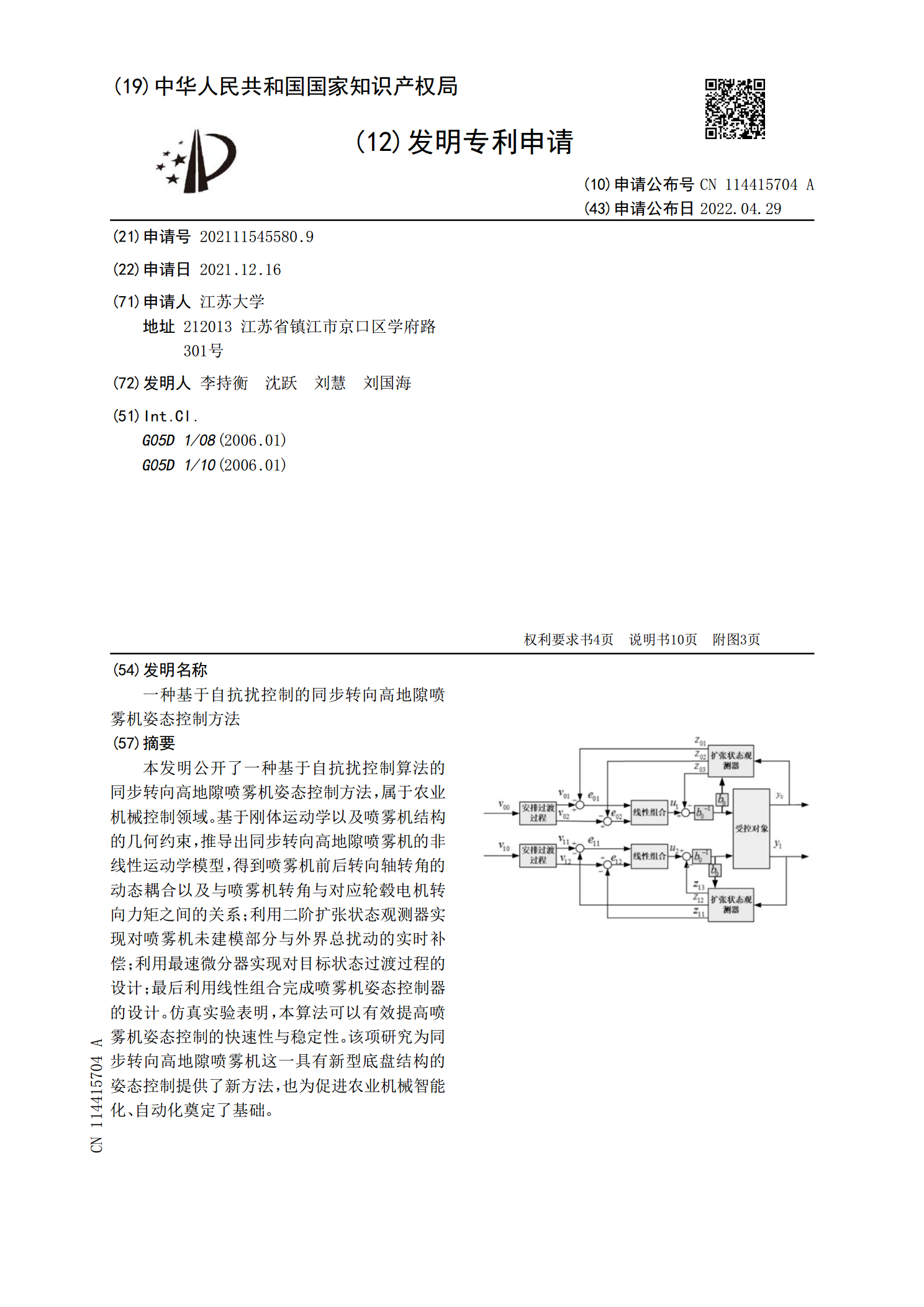
本发明公开了一种基于自抗扰控制算法的同步转向高地隙喷雾机姿态控制方法,属于农业机械控制领域。基于刚体运动学以及喷雾机结构的几何约束,推导出同步转向高地隙喷雾机的非线性运动学模型,得到喷雾机前后转向轴转角的动态耦合以及与喷雾机转角与对应轮毂电机转向力矩之间的关系;利用二阶扩张状态观测器实现对喷雾机未建模部分与外界总扰动的实时补偿;利用最速微分器实现对目标状态过渡过程的设计;最后利用线性组合完成喷雾机姿态控制器的设计。仿真实验表明,本算法可以有效提高喷雾机姿态控制的快速性与稳定性。该项研究为同步转向高地隙喷雾
基于轴角矢量的多旋翼姿态自抗扰控制方法及系统.pdf
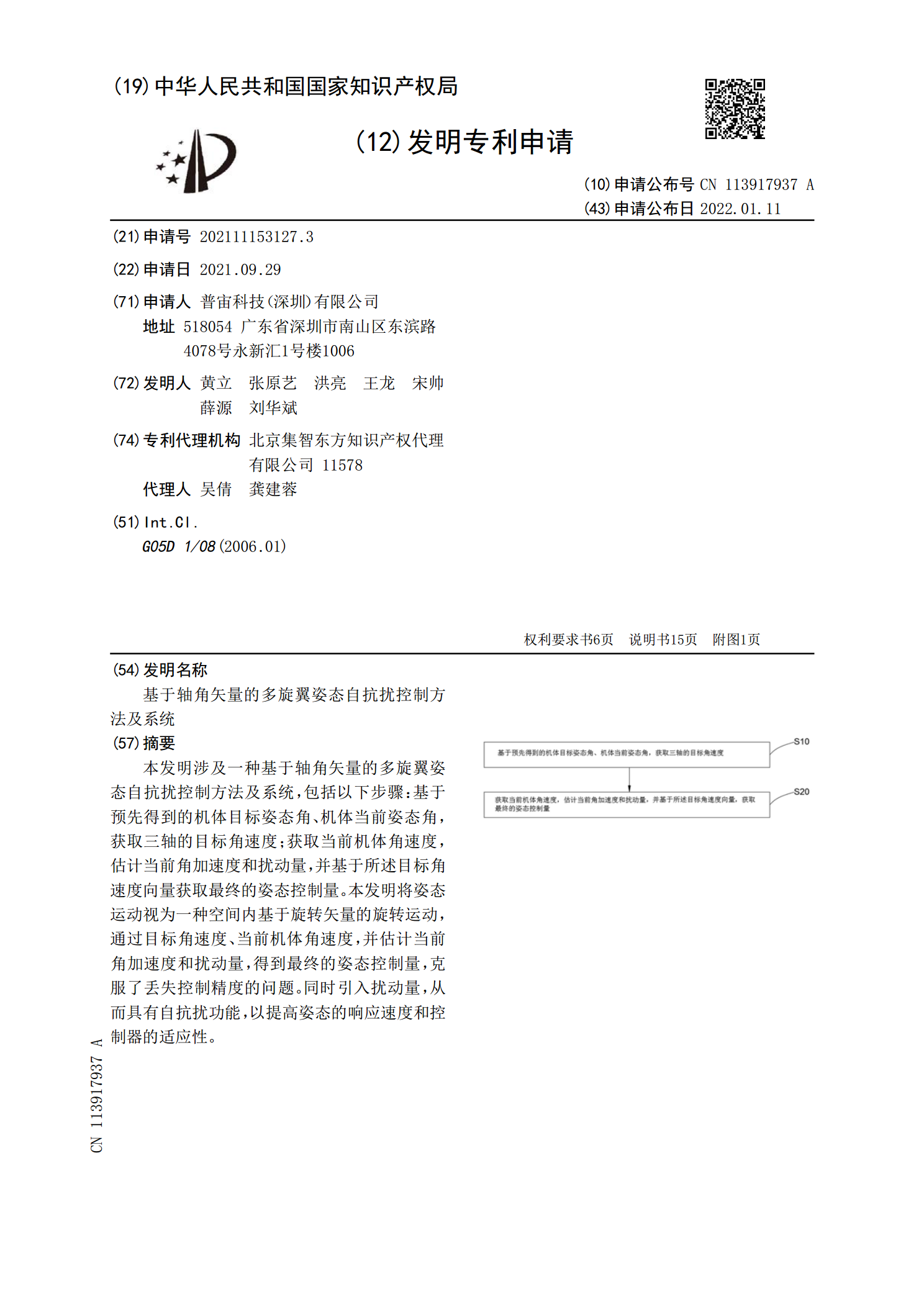
本发明涉及一种基于轴角矢量的多旋翼姿态自抗扰控制方法及系统,包括以下步骤:基于预先得到的机体目标姿态角、机体当前姿态角,获取三轴的目标角速度;获取当前机体角速度,估计当前角加速度和扰动量,并基于所述目标角速度向量获取最终的姿态控制量。本发明将姿态运动视为一种空间内基于旋转矢量的旋转运动,通过目标角速度、当前机体角速度,并估计当前角加速度和扰动量,得到最终的姿态控制量,克服了丢失控制精度的问题。同时引入扰动量,从而具有自抗扰功能,以提高姿态的响应速度和控制器的适应性。
基于轴角矢量的多旋翼姿态自抗扰控制方法及系统.pdf
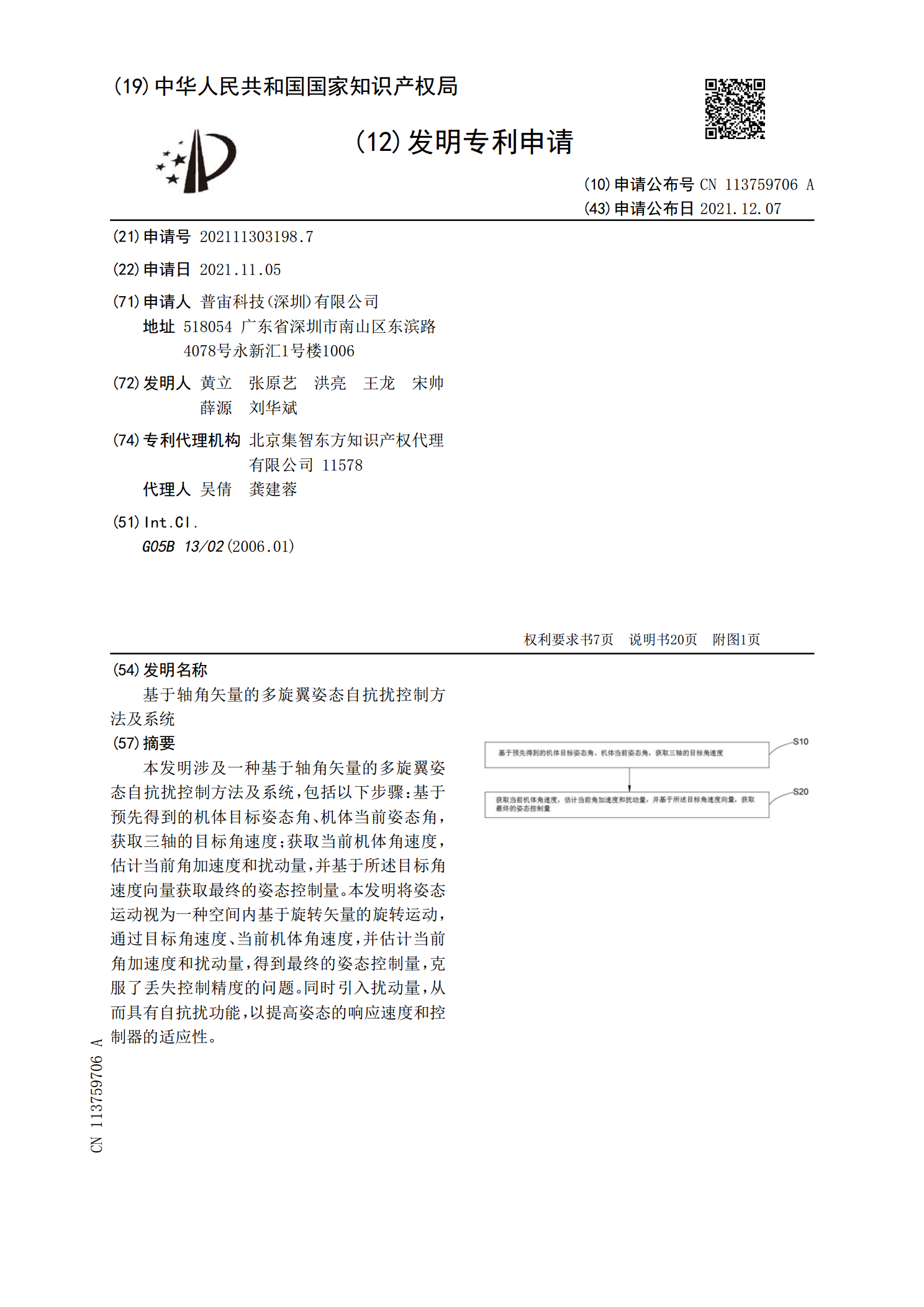
本发明涉及一种基于轴角矢量的多旋翼姿态自抗扰控制方法及系统,包括以下步骤:基于预先得到的机体目标姿态角、机体当前姿态角,获取三轴的目标角速度;获取当前机体角速度,估计当前角加速度和扰动量,并基于所述目标角速度向量获取最终的姿态控制量。本发明将姿态运动视为一种空间内基于旋转矢量的旋转运动,通过目标角速度、当前机体角速度,并估计当前角加速度和扰动量,得到最终的姿态控制量,克服了丢失控制精度的问题。同时引入扰动量,从而具有自抗扰功能,以提高姿态的响应速度和控制器的适应性。

基于改进自抗扰技术的四旋翼姿态控制.docx
基于改进自抗扰技术的四旋翼姿态控制摘要:四旋翼飞行器在姿态控制方面具有很大的挑战,尤其是在复杂环境中。针对这一问题,本文提出了一种基于改进自抗扰技术的四旋翼姿态控制方法。该方法通过综合考虑飞行器的动力学模型和扰动模型,设计出相应的自抗扰控制器,并通过仿真实验进行验证。结果表明,改进自抗扰技术能够显著提高四旋翼飞行器的姿态控制性能,提高其稳定性和鲁棒性。关键词:四旋翼飞行器;姿态控制;自抗扰技术1.引言自抗扰技术是一种应对系统内外扰动的一种控制策略,它通过将扰动视为系统的一部分进行建模和补偿,从而提高系统的

基于非线性自抗扰的四旋翼姿态控制.pptx
汇报人:CONTENTS添加章节标题非线性自抗扰控制技术背景介绍技术原理优势与特点应用领域四旋翼姿态控制系统系统组成工作原理姿态解算方法姿态控制策略非线性自抗扰在四旋翼姿态控制中的应用算法实现实验验证控制效果评估对比分析结论与展望研究成果总结未来研究方向技术推广价值汇报人: