
一种非磁性船体附着海洋生物的清除结构及其使用方法.pdf

是你****嘉嘉


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种非磁性船体附着海洋生物的清除结构及其使用方法.pdf
本发明涉及一种非磁性船体附着海洋生物的清除结构及其使用方法,包括履带式清除机器人A和履带式清除机器人B,两个履带式清除机器人的两侧均铰接刚性三角框,船头和船尾分别固定固定杆,船头固定杆通过吊绳安装电动葫芦D,船尾固定杆通过吊绳安装电动葫芦E,两个电动葫芦分别通过吊钩吊置环形缆绳,环形缆绳上在船体连接电动滑梭A和电动滑梭B,电动滑梭A下方串接拉力传感器A和电动葫芦A,电动滑梭B下方串接拉力传感器B和电动葫芦B,吊绳A与履带式清除机器人A一侧的刚性三角框的顶角端连接,吊绳B与履带式清除机器人B一侧的刚性三角框
船体附着物清除装置.pdf
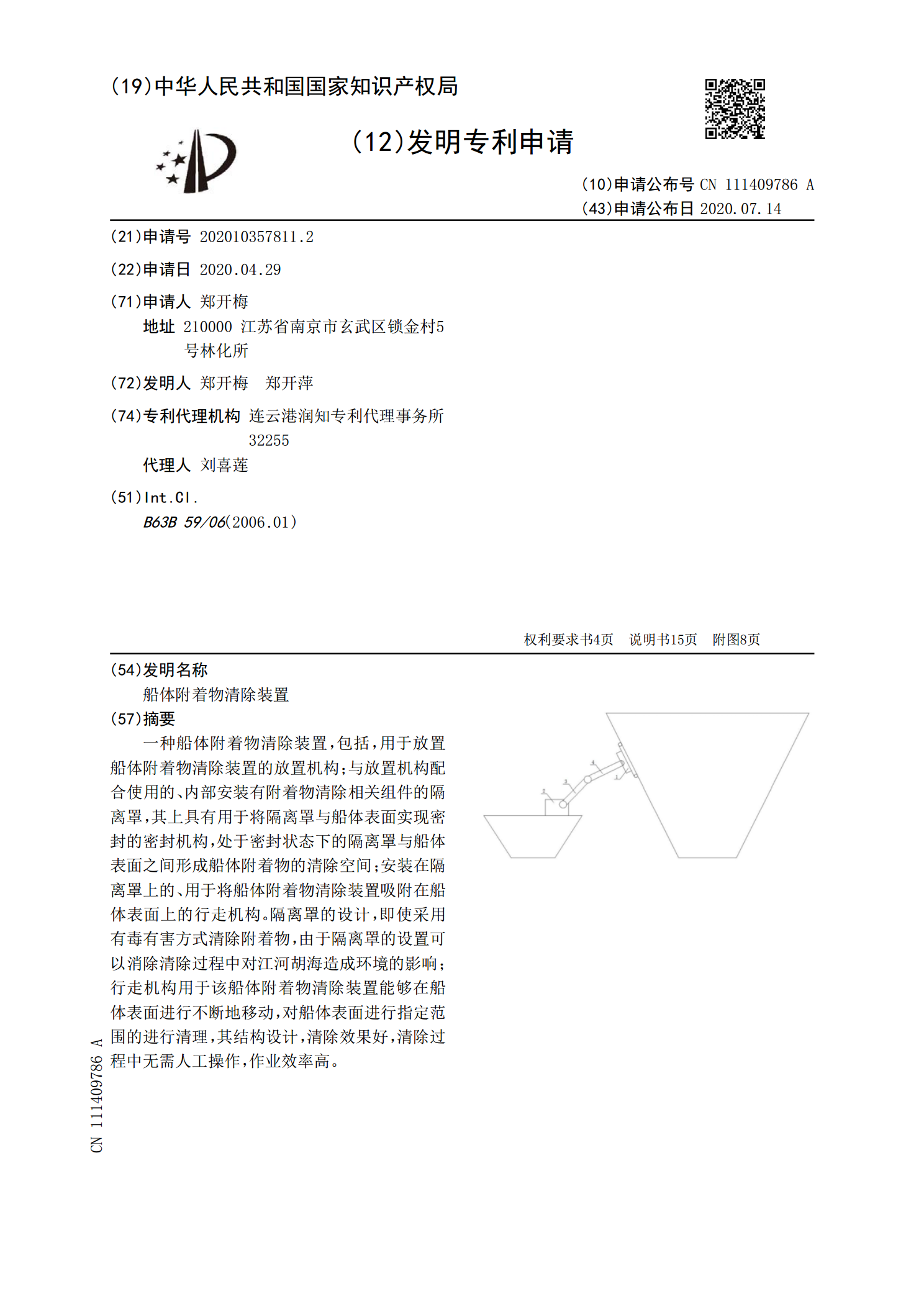
一种船体附着物清除装置,包括,用于放置船体附着物清除装置的放置机构;与放置机构配合使用的、内部安装有附着物清除相关组件的隔离罩,其上具有用于将隔离罩与船体表面实现密封的密封机构,处于密封状态下的隔离罩与船体表面之间形成船体附着物的清除空间;安装在隔离罩上的、用于将船体附着物清除装置吸附在船体表面上的行走机构。隔离罩的设计,即使采用有毒有害方式清除附着物,由于隔离罩的设置可以消除清除过程中对江河胡海造成环境的影响;行走机构用于该船体附着物清除装置能够在船体表面进行不断地移动,对船体表面进行指定范围的进行清理

船体附着物定向清除系统以及相应终端.pdf
本发明涉及一种船体附着物定向清除系统以及相应终端,所述终端包括:药品调配设备,用于基于接收到的每一种附着物的数量确定所述种类附着物对应类型的化学药品的调配剂量,并基于各种化学药品的调配剂量分别采集各种化学药品并进行调配以获得混合药剂;超高压喷射机构,用于向轮船的船体的水下部分执行所述混合药剂的定向超高压喷射;所述超高压喷射机构包括喷射云台、喷射龙头和喷射水泵;定时驱动机构,设置在轮船的底部,用于每隔预设时长从轮船的底部伸出。本发明的船体附着物定向清除系统以及相应终端维护方便、具有一定的自动化水平。由于在轮

清除水下船体附着物机器人.pdf
本发明公开了一种清除水下船体附着物机器人,包括电磁机架,电磁机架的内部设计成一个腔体,电磁机架上表面设置主电机,主电机带动两只传动轮,为使两个传动轮传动平稳,在主动轮与第二个传动轮间设置一个惰轮,使两个传动轮以相对的方向,对中旋转。在机架腔口两个传动轮的下方通过传动轴,连有两个粉碎轮,粉碎轮下设有切割片和刚性刷,经切割片和刚性刷清除下来的附着物,沿着线速度方向,通过粉碎轮和齿轮泵的高速水流带出水面,经消毒后收集处理。电磁机架上表面设有驱动电机,驱动一组主动车轮,后有一组遥控换向的从动轮。本发明具有结构合理
一种船体结构及其制造方法.pdf
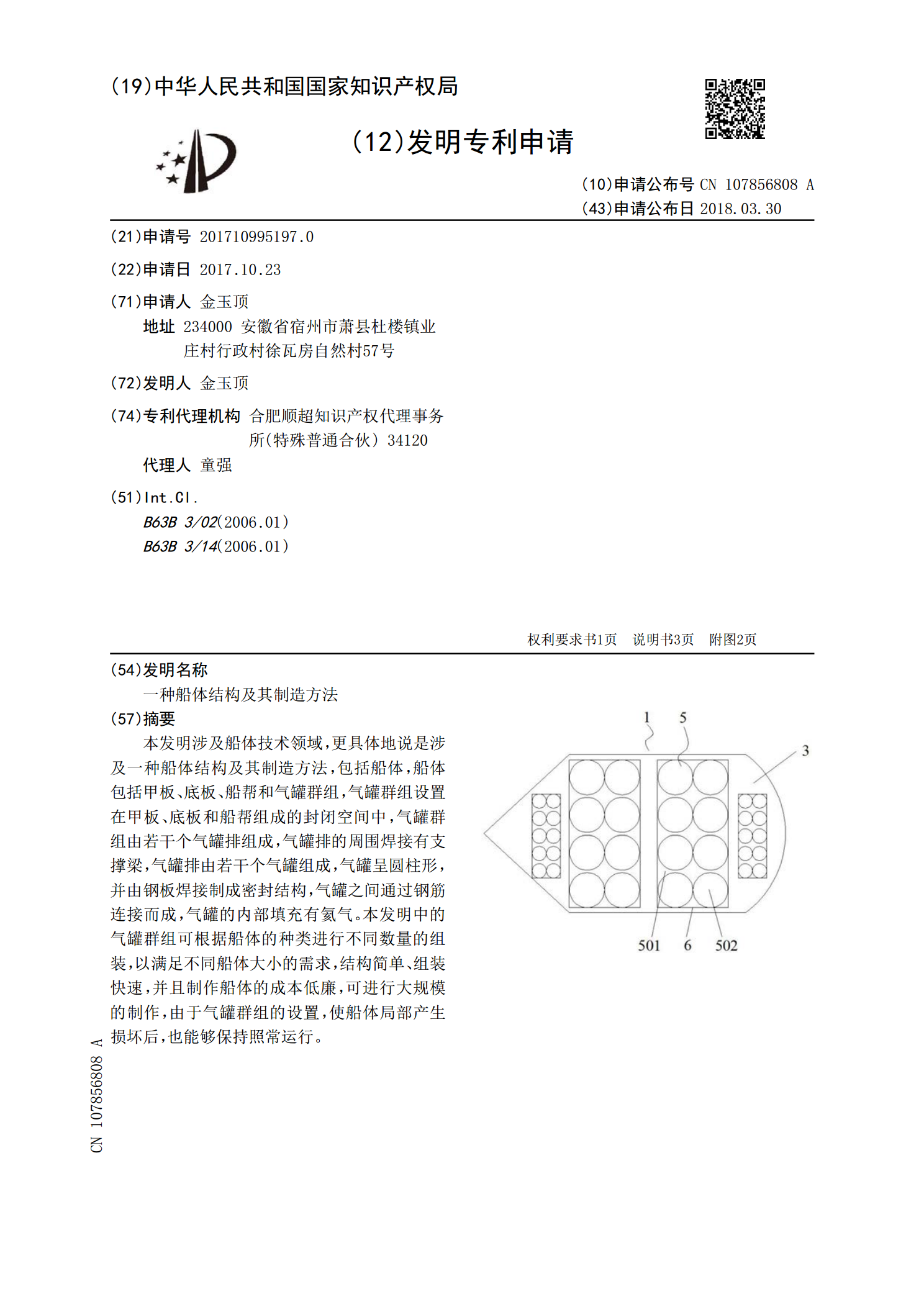
本发明涉及船体技术领域,更具体地说是涉及一种船体结构及其制造方法,包括船体,船体包括甲板、底板、船帮和气罐群组,气罐群组设置在甲板、底板和船帮组成的封闭空间中,气罐群组由若干个气罐排组成,气罐排的周围焊接有支撑梁,气罐排由若干个气罐组成,气罐呈圆柱形,并由钢板焊接制成密封结构,气罐之间通过钢筋连接而成,气罐的内部填充有氦气。本发明中的气罐群组可根据船体的种类进行不同数量的组装,以满足不同船体大小的需求,结构简单、组装快速,并且制作船体的成本低廉,可进行大规模的制作,由于气罐群组的设置,使船体局部产生损坏后