
用于机器人的关节、机械臂和机器人.pdf

猫巷****觅蓉

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于机器人的关节、机械臂和机器人.pdf
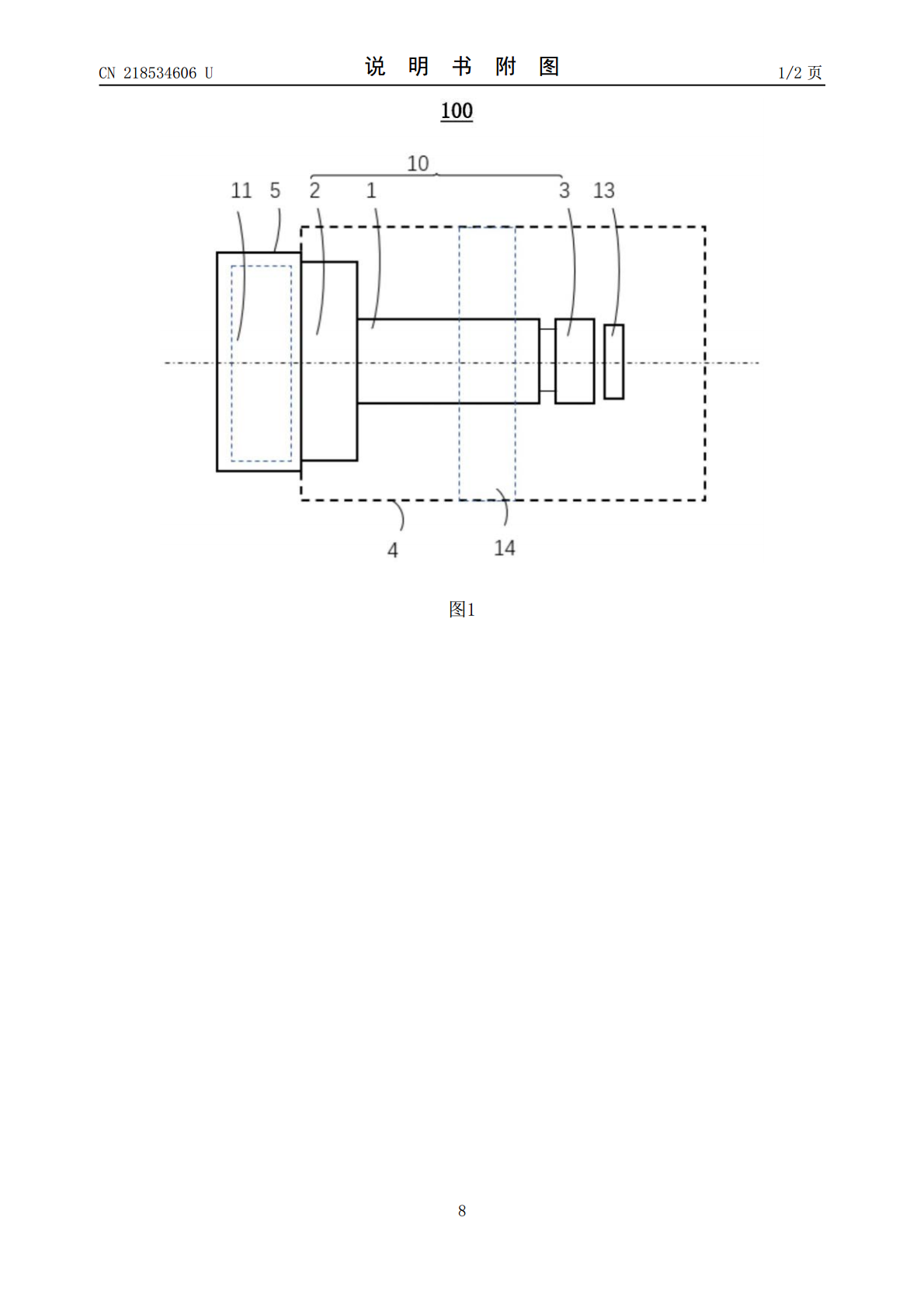
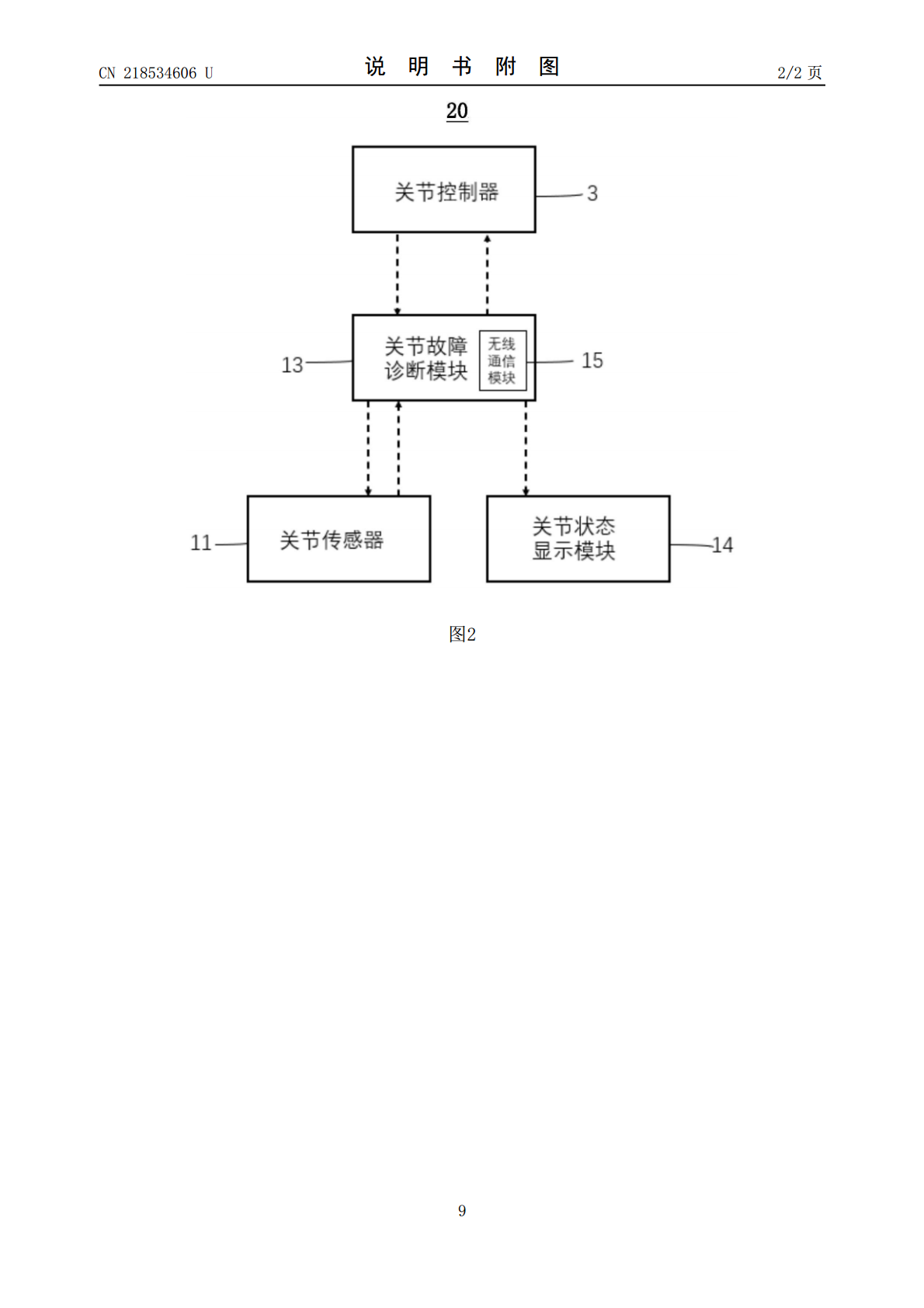
公开了一种用于机器人的关节、机械臂和机器人。用于机器人的关节具有包括伺服电机、减速器和关节控制器的关节模组,所述关节还包括:力传感器,其设置在关节的输出端并测量输出端的受力状态以产生相应的数据信息;故障诊断模块,其与力传感器无线通信连接以从力传感器实时接收数据信息,故障诊断模块基于数据信息和用于驱动伺服电机的实时电学信号确定关节的运行状态。机械臂包括至少一个用于机器人的关节。机器人包括至少一个用于机器人的关节。在所述关节、机械臂和机器人中,可以实现关节的自我故障监测和诊断。

用于机器人或机械臂关节的行星传动减速器.pdf
本发明公开了一种用于机器人或机械臂关节的行星传动减速器,包括太阳轮、行星架、驱动件、至少一个行星轮,控制件、第一内齿圈及第二内齿圈;控制件控制驱动件可选择地驱动太阳轮或太阳轮和行星架一起转动;行星轮与太阳轮啮合、第一内齿圈及第二内齿圈均与行星轮啮合,且第一内齿圈和第二内齿圈的齿数不同。本发明利用太阳轮、行星架、行星轮、第一内齿圈及第二内齿圈形成一个行星齿轮减速结构,使得结构紧凑,减小了体积;且同时设置第一内齿圈和第二内齿圈,提高了减速传动比;使得在使用的过程中,第二内齿圈一直有输出,从而通过第二内齿圈或第
关节、机械臂、机器人及其安装方法.pdf
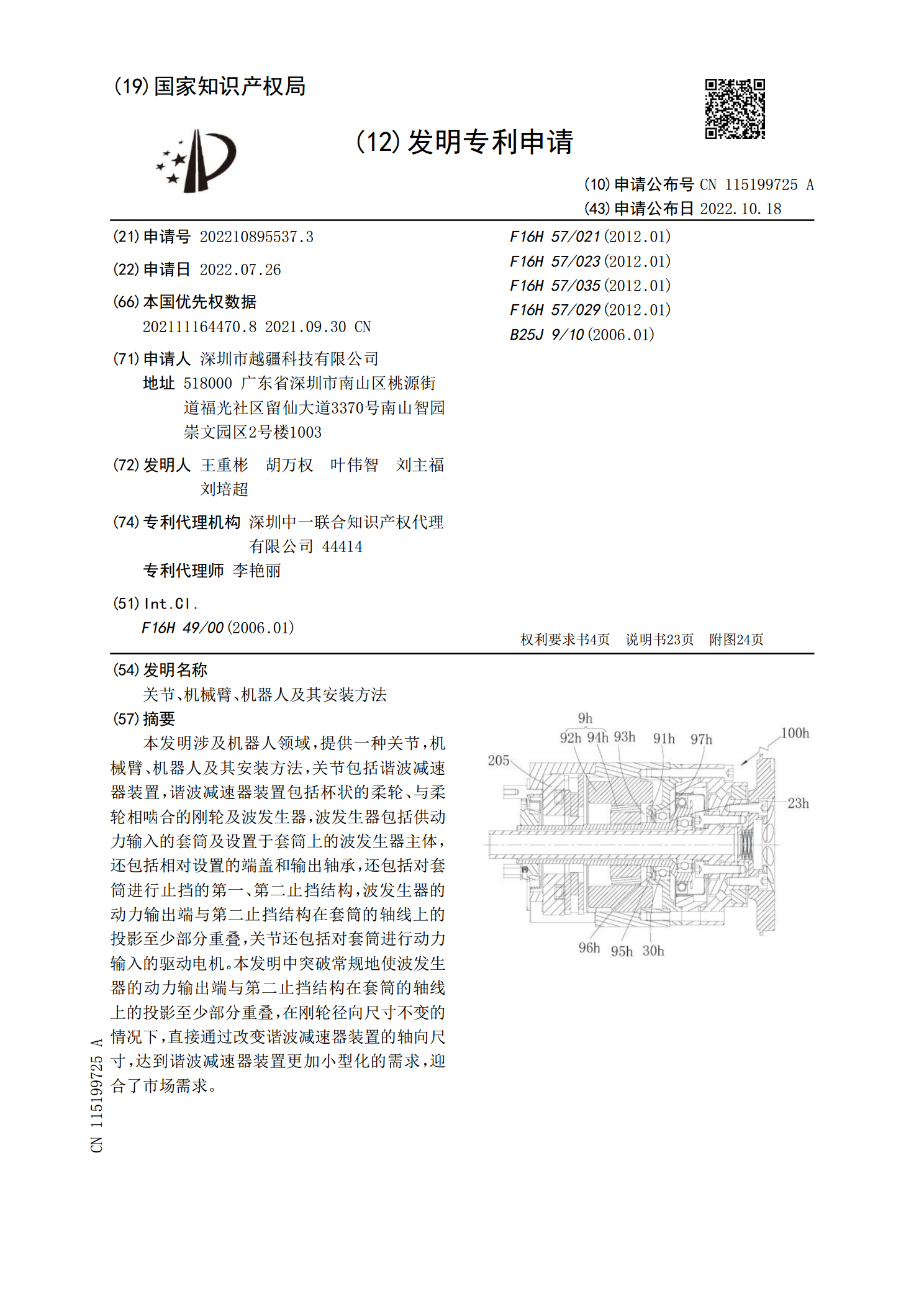
本发明涉及机器人领域,提供一种关节,机械臂、机器人及其安装方法,关节包括谐波减速器装置,谐波减速器装置包括杯状的柔轮、与柔轮相啮合的刚轮及波发生器,波发生器包括供动力输入的套筒及设置于套筒上的波发生器主体,还包括相对设置的端盖和输出轴承,还包括对套筒进行止挡的第一、第二止挡结构,波发生器的动力输出端与第二止挡结构在套筒的轴线上的投影至少部分重叠,关节还包括对套筒进行动力输入的驱动电机。本发明中突破常规地使波发生器的动力输出端与第二止挡结构在套筒的轴线上的投影至少部分重叠,在刚轮径向尺寸不变的情况下,直接通
用于移动机器人的机械臂和移动机器人.pdf
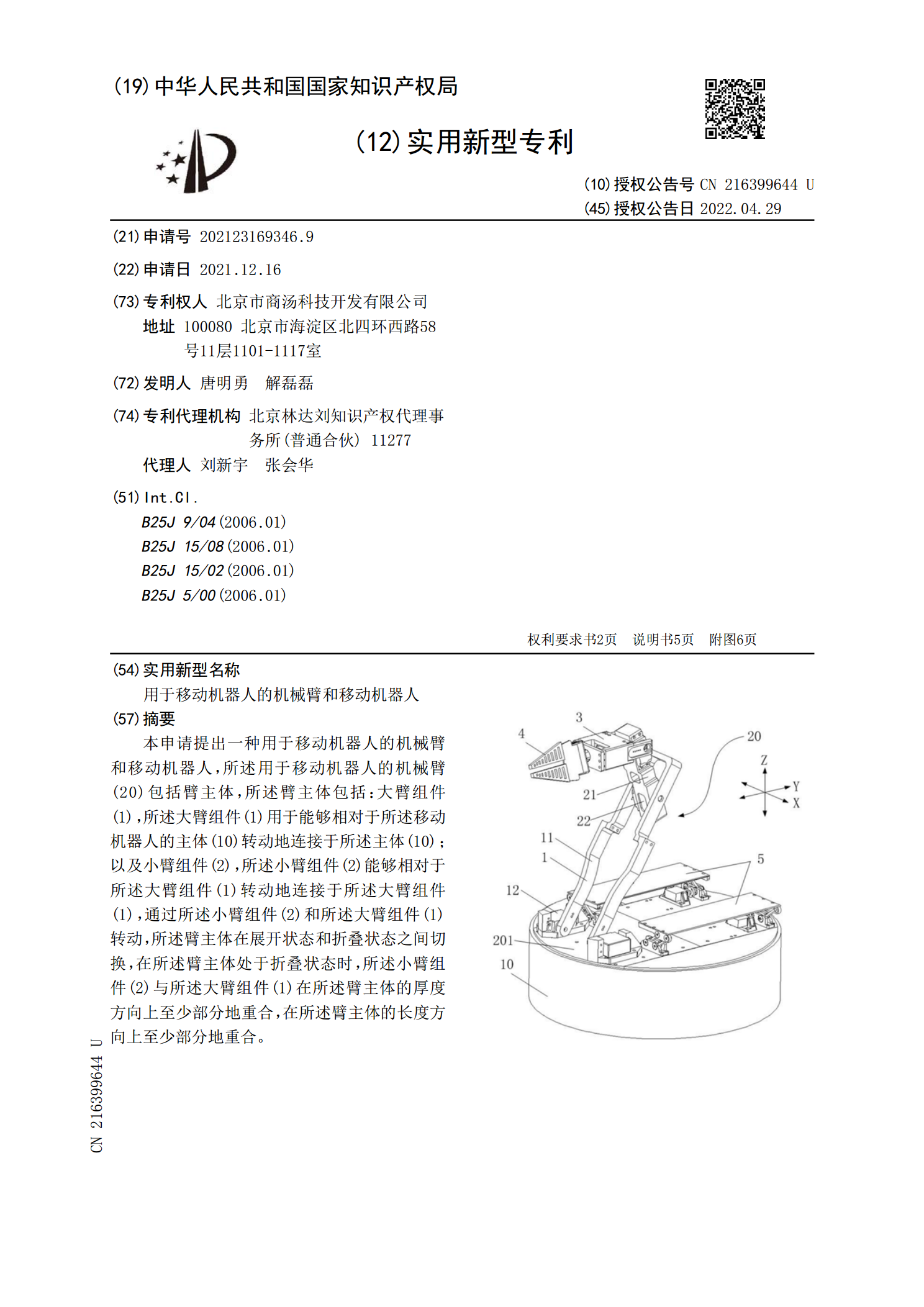
本申请提出一种用于移动机器人的机械臂和移动机器人,所述用于移动机器人的机械臂(20)包括臂主体,所述臂主体包括:大臂组件(1),所述大臂组件(1)用于能够相对于所述移动机器人的主体(10)转动地连接于所述主体(10);以及小臂组件(2),所述小臂组件(2)能够相对于所述大臂组件(1)转动地连接于所述大臂组件(1),通过所述小臂组件(2)和所述大臂组件(1)转动,所述臂主体在展开状态和折叠状态之间切换,在所述臂主体处于折叠状态时,所述小臂组件(2)与所述大臂组件(1)在所述臂主体的厚度方向上至少部分地重合,

致动器和多关节机器人臂.pdf
一种致动器,包括:壳体;输出轴,所述输出轴布置成与壳体同轴并且设置成相对于壳体自由旋转;以及驱动机构,所述驱动机构用于相对于壳体旋转地驱动输出轴。驱动机构包括:第一齿轮、第二齿轮、转盘齿轮、转子磁路和定子磁路。转盘齿轮布置在第一齿轮和第二齿轮之间,并且设置成围绕倾斜轴线自由旋转,所述倾斜轴线相对于壳体的轴线倾斜。转子磁路固定至转盘齿轮。定子磁路固定至壳体并且构造成产生吸引或排斥转子磁路的电磁力,由此使转盘齿轮摆动。