
致动器和多关节机器人臂.pdf

绮兰****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

致动器和多关节机器人臂.pdf
一种致动器,包括:壳体;输出轴,所述输出轴布置成与壳体同轴并且设置成相对于壳体自由旋转;以及驱动机构,所述驱动机构用于相对于壳体旋转地驱动输出轴。驱动机构包括:第一齿轮、第二齿轮、转盘齿轮、转子磁路和定子磁路。转盘齿轮布置在第一齿轮和第二齿轮之间,并且设置成围绕倾斜轴线自由旋转,所述倾斜轴线相对于壳体的轴线倾斜。转子磁路固定至转盘齿轮。定子磁路固定至壳体并且构造成产生吸引或排斥转子磁路的电磁力,由此使转盘齿轮摆动。
用于使关节伸展和弯曲的带多电机组件的致动器系统.pdf
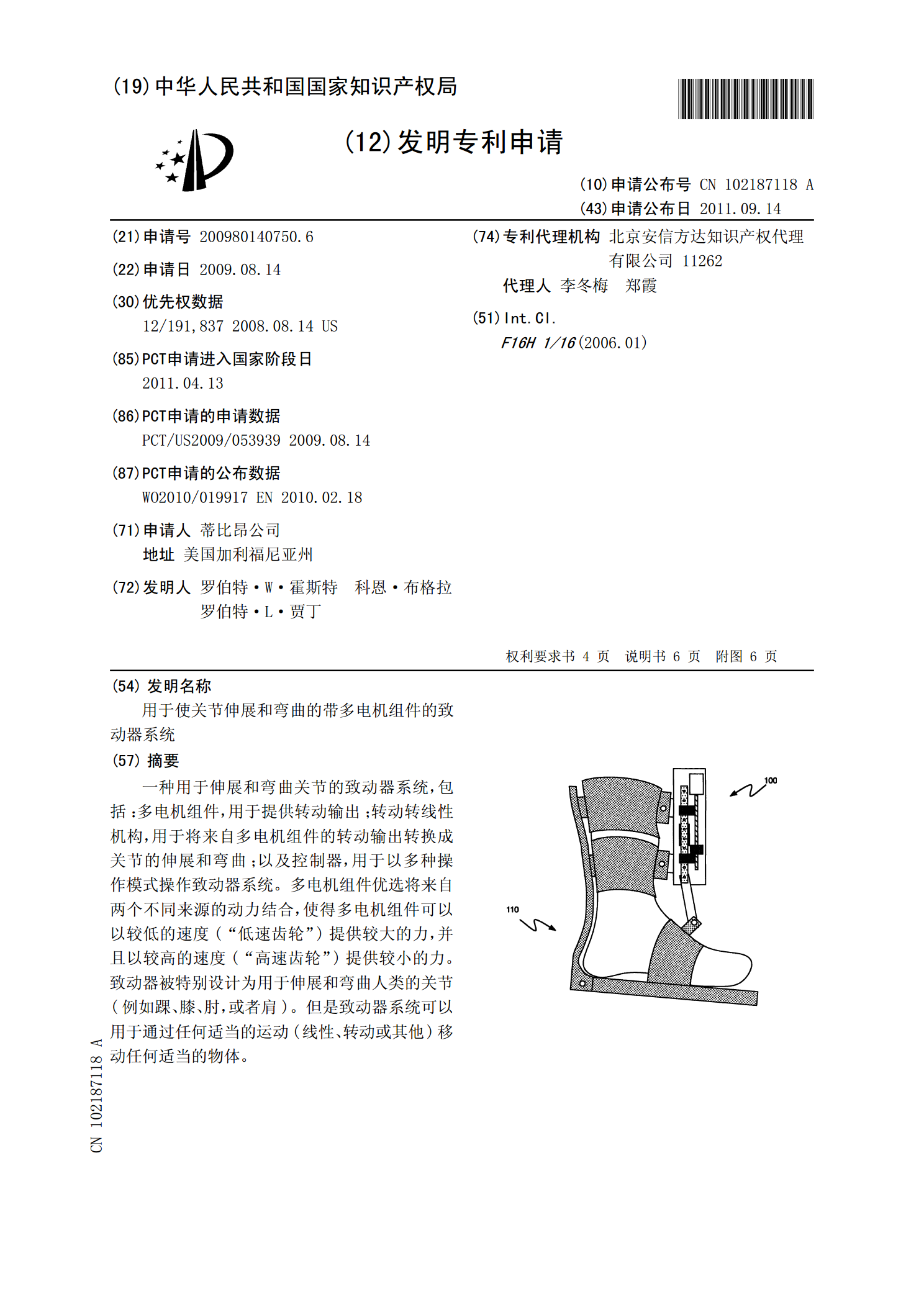
一种用于伸展和弯曲关节的致动器系统,包括:多电机组件,用于提供转动输出;转动转线性机构,用于将来自多电机组件的转动输出转换成关节的伸展和弯曲;以及控制器,用于以多种操作模式操作致动器系统。多电机组件优选将来自两个不同来源的动力结合,使得多电机组件可以以较低的速度(“低速齿轮”)提供较大的力,并且以较高的速度(“高速齿轮”)提供较小的力。致动器被特别设计为用于伸展和弯曲人类的关节(例如踝、膝、肘,或者肩)。但是致动器系统可以用于通过任何适当的运动(线性、转动或其他)移动任何适当的物体。
附接轮毂和抓持器组件的软机器人致动器、加强致动器及电附着致动器.pdf
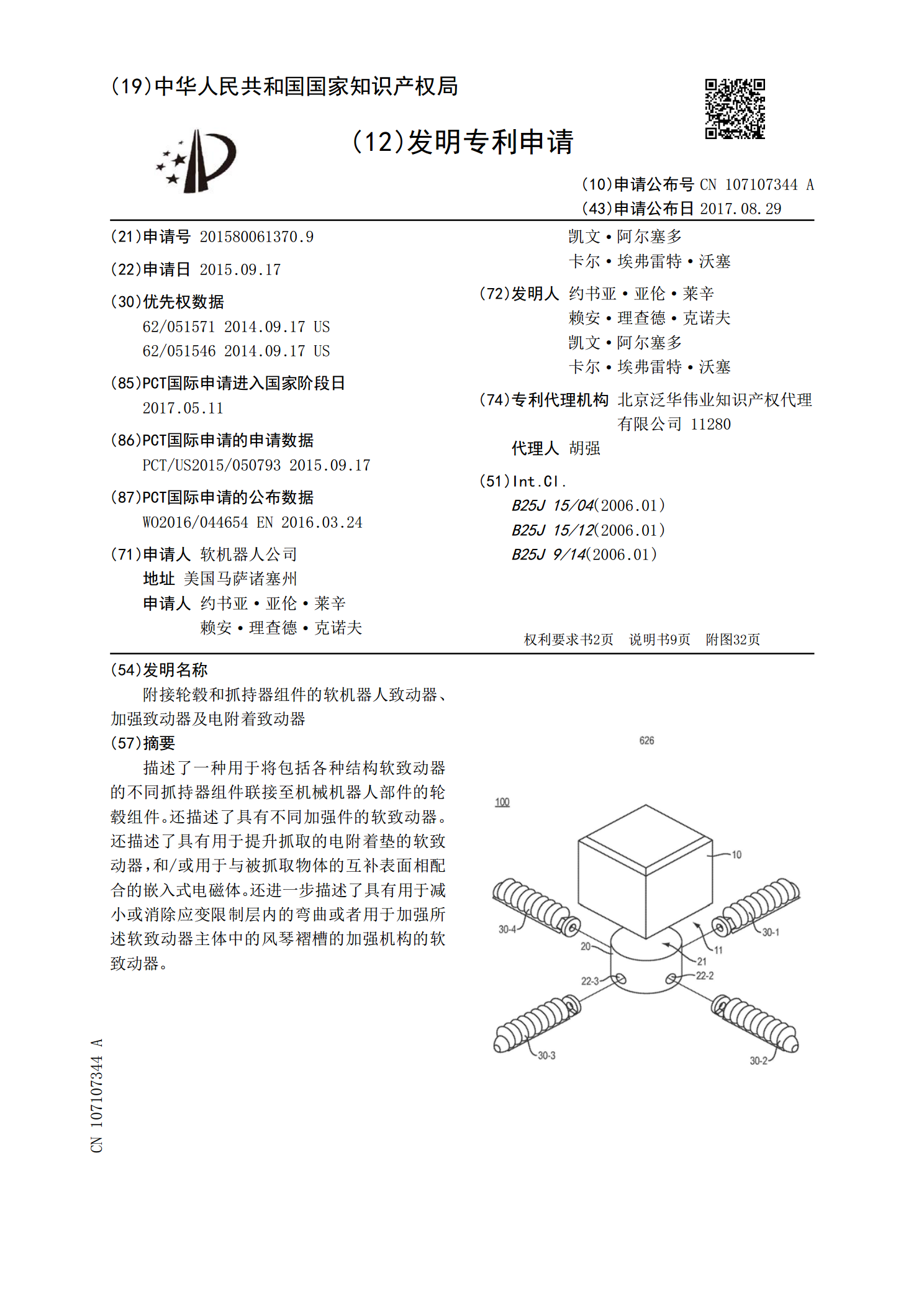
描述了一种用于将包括各种结构软致动器的不同抓持器组件联接至机械机器人部件的轮毂组件。还描述了具有不同加强件的软致动器。还描述了具有用于提升抓取的电附着垫的软致动器,和/或用于与被抓取物体的互补表面相配合的嵌入式电磁体。还进一步描述了具有用于减小或消除应变限制层内的弯曲或者用于加强所述软致动器主体中的风琴褶槽的加强机构的软致动器。
致动器装置和致动器系统.pdf
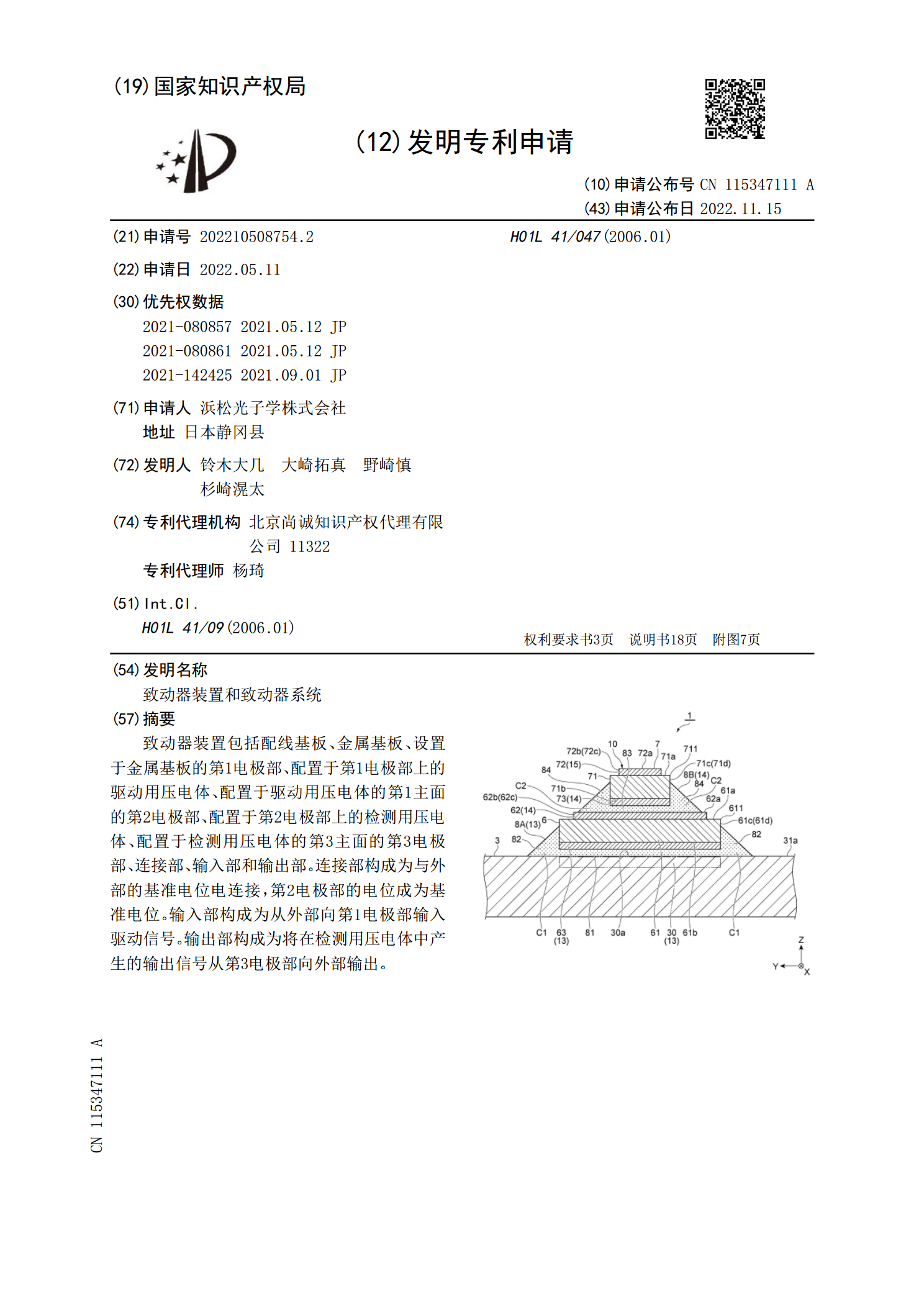
致动器装置包括配线基板、金属基板、设置于金属基板的第1电极部、配置于第1电极部上的驱动用压电体、配置于驱动用压电体的第1主面的第2电极部、配置于第2电极部上的检测用压电体、配置于检测用压电体的第3主面的第3电极部、连接部、输入部和输出部。连接部构成为与外部的基准电位电连接,第2电极部的电位成为基准电位。输入部构成为从外部向第1电极部输入驱动信号。输出部构成为将在检测用压电体中产生的输出信号从第3电极部向外部输出。
机器人的致动器与机构.ppt
致動器(Actuator)電磁式致動器電磁式致動器電磁式致動器滾珠導螺桿以伺服馬達驅動之機械手臂液壓系統液壓系統液壓式致動器液壓式致動器液壓系統的優點:液壓系統的缺點:氣壓系統氣壓系統氣壓系統氣壓式致動器氣壓式致動器氣壓系統的優點:氣壓系統的缺點:壓電式致動器超音波式致動器形狀記憶合金致動器靜電式致動器機械人機構機械人機構機械人機構機械人機構機械人機構機械人機構–手腕機械人機構–手