
介入手术机器人从端驱动装置.pdf

飞舟****文章

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
介入手术机器人从端驱动装置.pdf
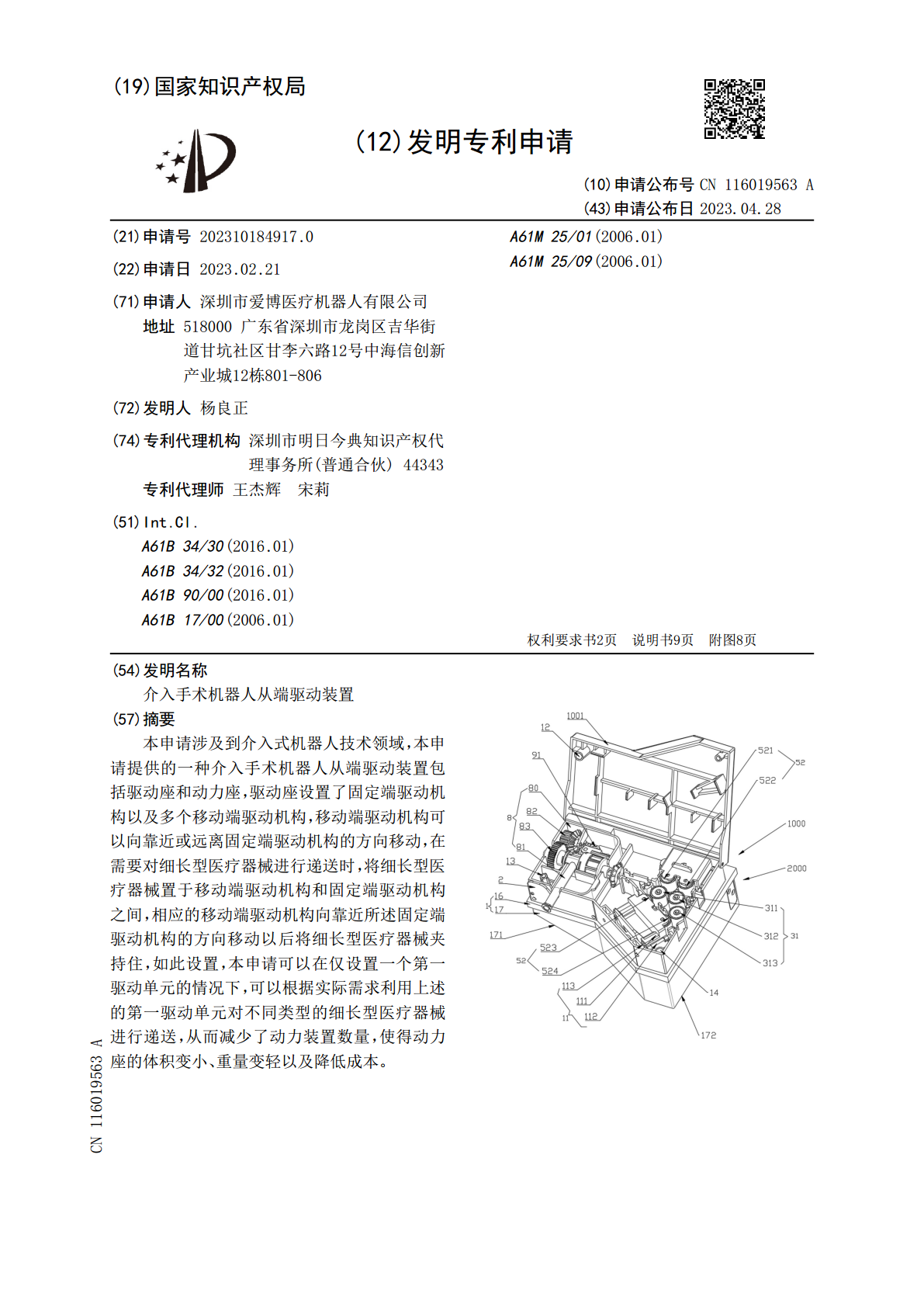
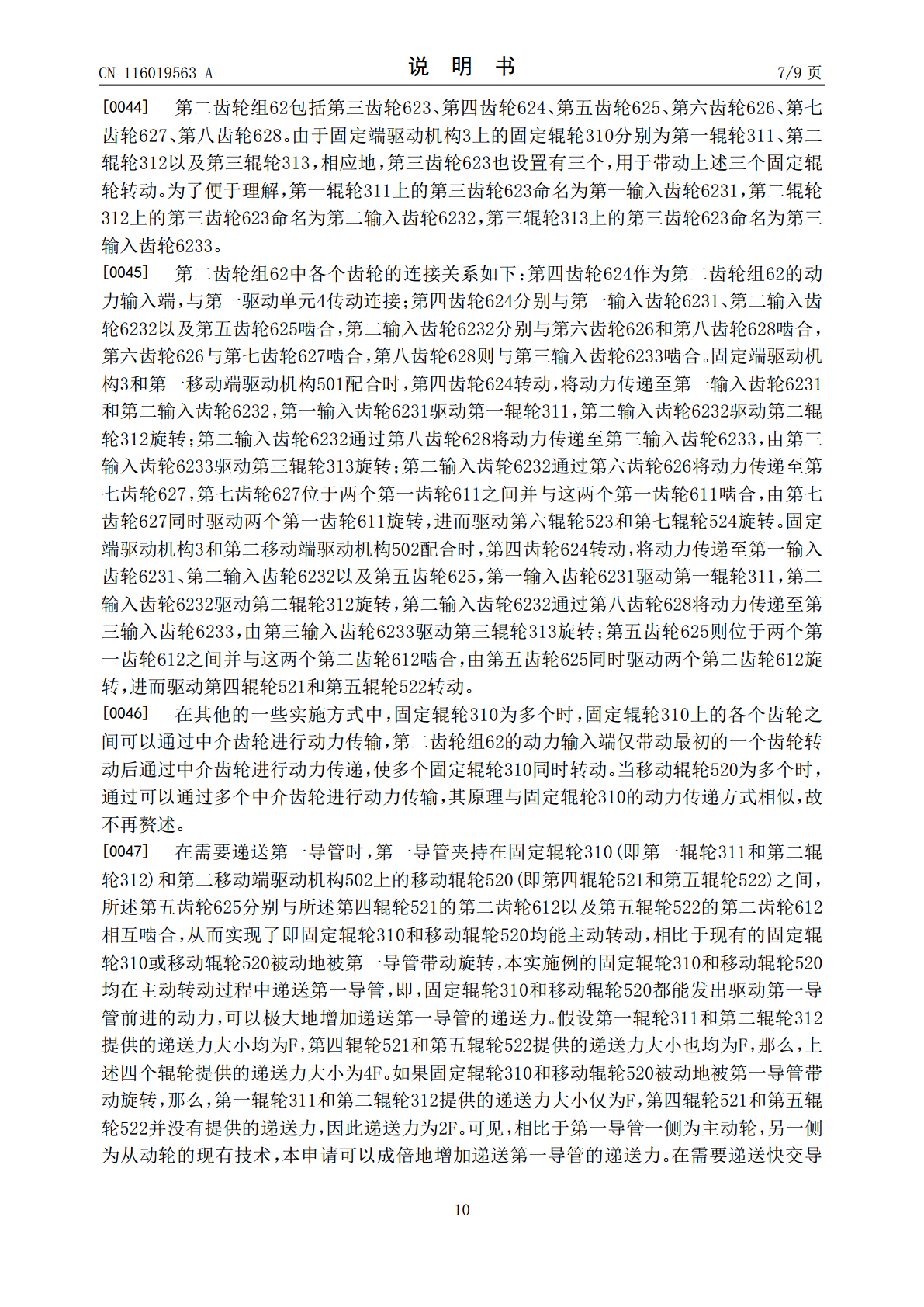
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN116019563A(43)申请公布日2023.04.28(21)申请号202310184917.0A61M25/01(2006.01)(22)申请日2023.02.21A61M25/09(2006.01)(71)申请人深圳市爱博医疗机器人有限公司地址518000广东省深圳市龙岗区吉华街道甘坑社区甘李六路12号中海信创新产业城12栋801-806(72)发明人杨良正(74)专利代理机构深圳市明日今典知识产权代理事务所(普通合伙)44343专利
介入手术机器人从端驱动装置.pdf
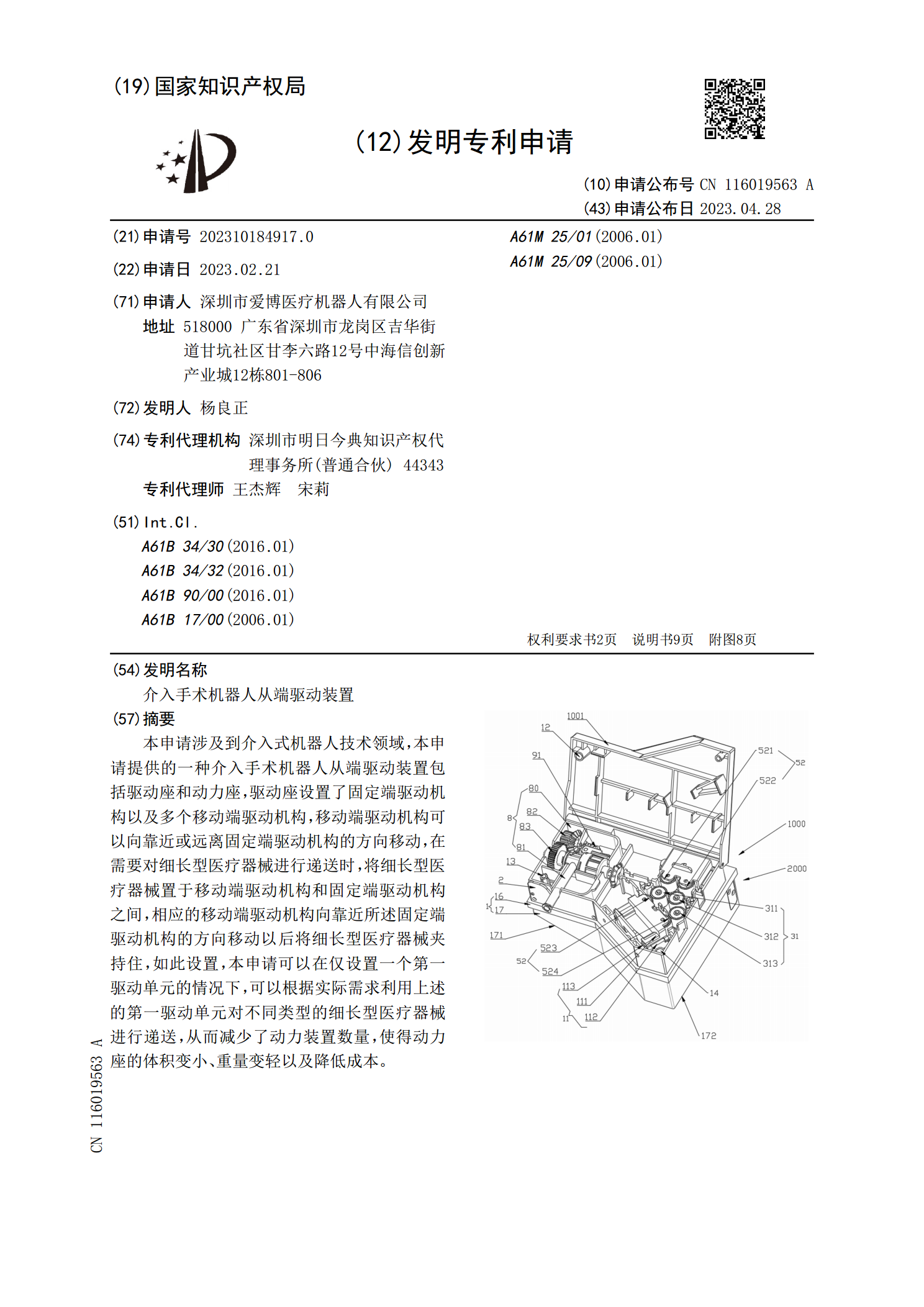
本说明书提供了一种介入手术机器人从端驱动装置,包括:耗材模块,包括:壳体,所述壳体构造有递送通道;至少一对驱动件,设置在所述壳体内并且在沿着垂直于所述递送通道的轴线方向上设置在所述递送通道的两侧;执行模块,包括:用于带动所述一对驱动件中的至少一个转动的第一动力源,所述第一动力源与所述壳体相对固定连接;用于带动所述壳体沿所述递送通道的轴线旋转的旋转组件;辅助模块,包括:固定设置地定子和相对所述定子旋转的动子,所述动子与所述第一动力源的线缆相连接。本申请提供的介入手术机器人从端驱动装置既能单独的驱动导丝或者导

介入手术机器人从端驱动装置以及耗材模块.pdf
本说明书提供了一种介入手术机器人从端驱动装置以及耗材模块,装置包括:推送组件,包括:壳体,壳体构造有递送通道;至少一对驱动件,设置在壳体内并且在沿着垂直于递送通道的轴线方向上设置在递送通道的两侧;设置在壳体内且用于带动一对驱动件中的至少一个转动的第一动力源;旋转组件,包括:与壳体相对固定的旋转件;用于带动旋转件围绕递送通道的轴线旋转的第二动力源;辅助组件,包括:定子和相对定子旋转的动子,动子与第一动力源的线缆相连接。本申请提供的介入手术机器人从端驱动装置以及耗材模块,其中,推送组件和旋转组件可以单独作用于
一种多功能介入手术机器人从端驱动装置.pdf
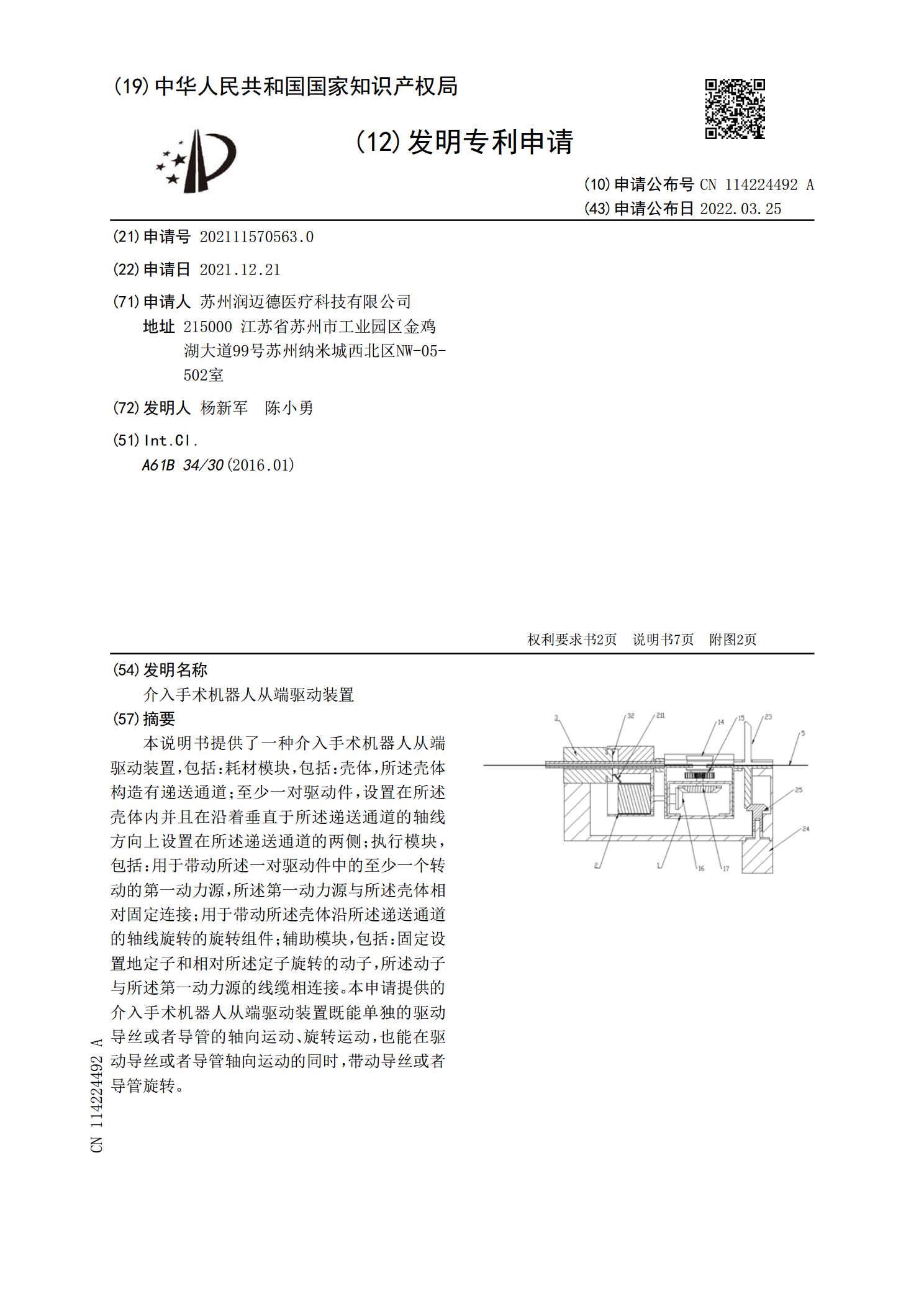
一种多功能介入手术机器人从端驱动装置,用于实现细长型医疗器材的夹持,其包括支撑架、装设于支撑架上的定支板、第一驱动组件、由第一驱动组件驱动在第一方向上与定支板相对运动的动支板、分别装设于定支板和动支板上的两夹持组,第一驱动组件在第一方向上带动动支板向定支板靠近或远离,让动支板上的夹持组与定支板上的夹持组相互配合以夹紧或松开细长型医疗器材。本发明可实现多种操作的切换,可以满足医生不同的操作需求,并且,传动效果好,实用性强,应用范围广,而且结构紧凑,占用空间较小,对介入手术的操作有较大帮助,具有较强的推广意义
一种介入手术机器人从端递送装置.pdf
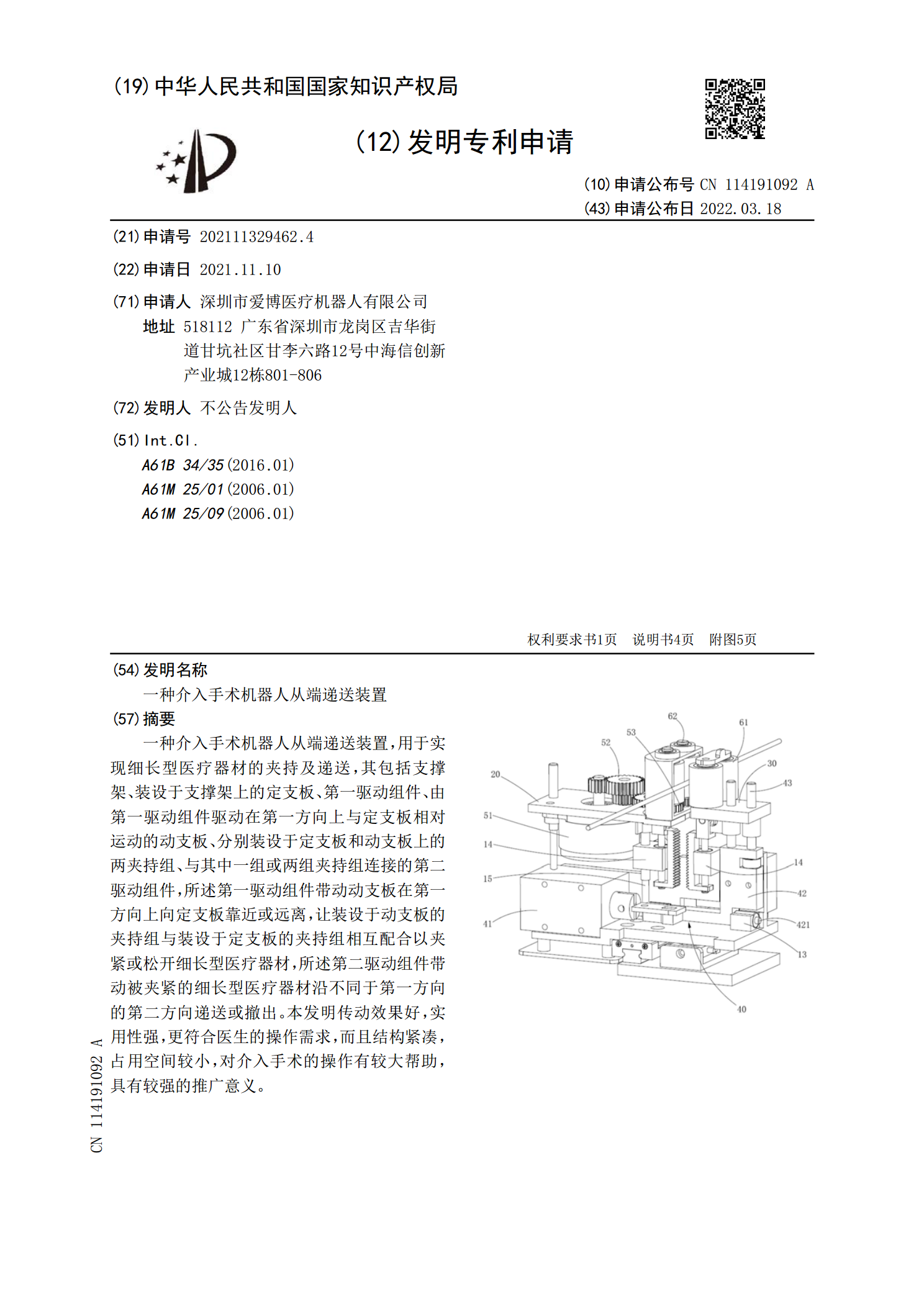
一种介入手术机器人从端递送装置,用于实现细长型医疗器材的夹持及递送,其包括支撑架、装设于支撑架上的定支板、第一驱动组件、由第一驱动组件驱动在第一方向上与定支板相对运动的动支板、分别装设于定支板和动支板上的两夹持组、与其中一组或两组夹持组连接的第二驱动组件,所述第一驱动组件带动动支板在第一方向上向定支板靠近或远离,让装设于动支板的夹持组与装设于定支板的夹持组相互配合以夹紧或松开细长型医疗器材,所述第二驱动组件带动被夹紧的细长型医疗器材沿不同于第一方向的第二方向递送或撤出。本发明传动效果好,实用性强,更符合医