
目标定位方法、装置、监控系统和存储介质.pdf

猫巷****婉慧

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
目标定位方法、装置、监控系统和存储介质.pdf
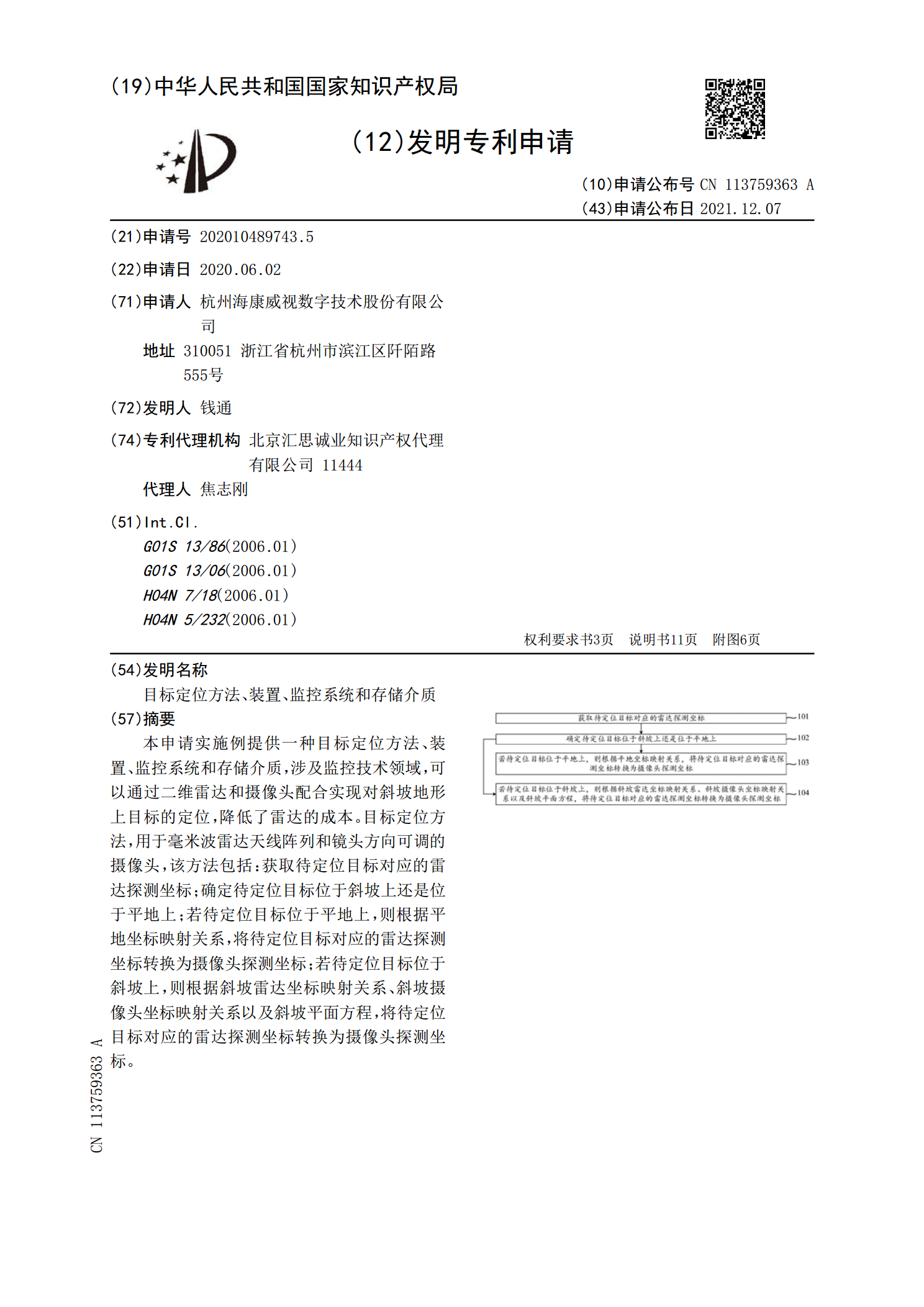
本申请实施例提供一种目标定位方法、装置、监控系统和存储介质,涉及监控技术领域,可以通过二维雷达和摄像头配合实现对斜坡地形上目标的定位,降低了雷达的成本。目标定位方法,用于毫米波雷达天线阵列和镜头方向可调的摄像头,该方法包括:获取待定位目标对应的雷达探测坐标;确定待定位目标位于斜坡上还是位于平地上;若待定位目标位于平地上,则根据平地坐标映射关系,将待定位目标对应的雷达探测坐标转换为摄像头探测坐标;若待定位目标位于斜坡上,则根据斜坡雷达坐标映射关系、斜坡摄像头坐标映射关系以及斜坡平面方程,将待定位目标对应的雷

监控方法、装置、系统和存储介质.pdf
本发明提供了一种监控方法、装置、系统和存储介质,该方法包括:获取监控图像;对于指定的监控方,在所述监控图像中提取包含与所述监控方相对应的监控对象的人脸图像的视频帧;对所述视频帧进行遮蔽处理,以遮蔽除所述监控对象所在区域以外的至少部分区域;以及将处理后的视频帧发送给所述监控方。本发明提供的监控方法、装置、系统和存储介质可以保证监控方只看到特定监控对象的监控状态,有效地保护了其他监控对象的隐私权。
定位方法、装置、设备、系统和存储介质.pdf
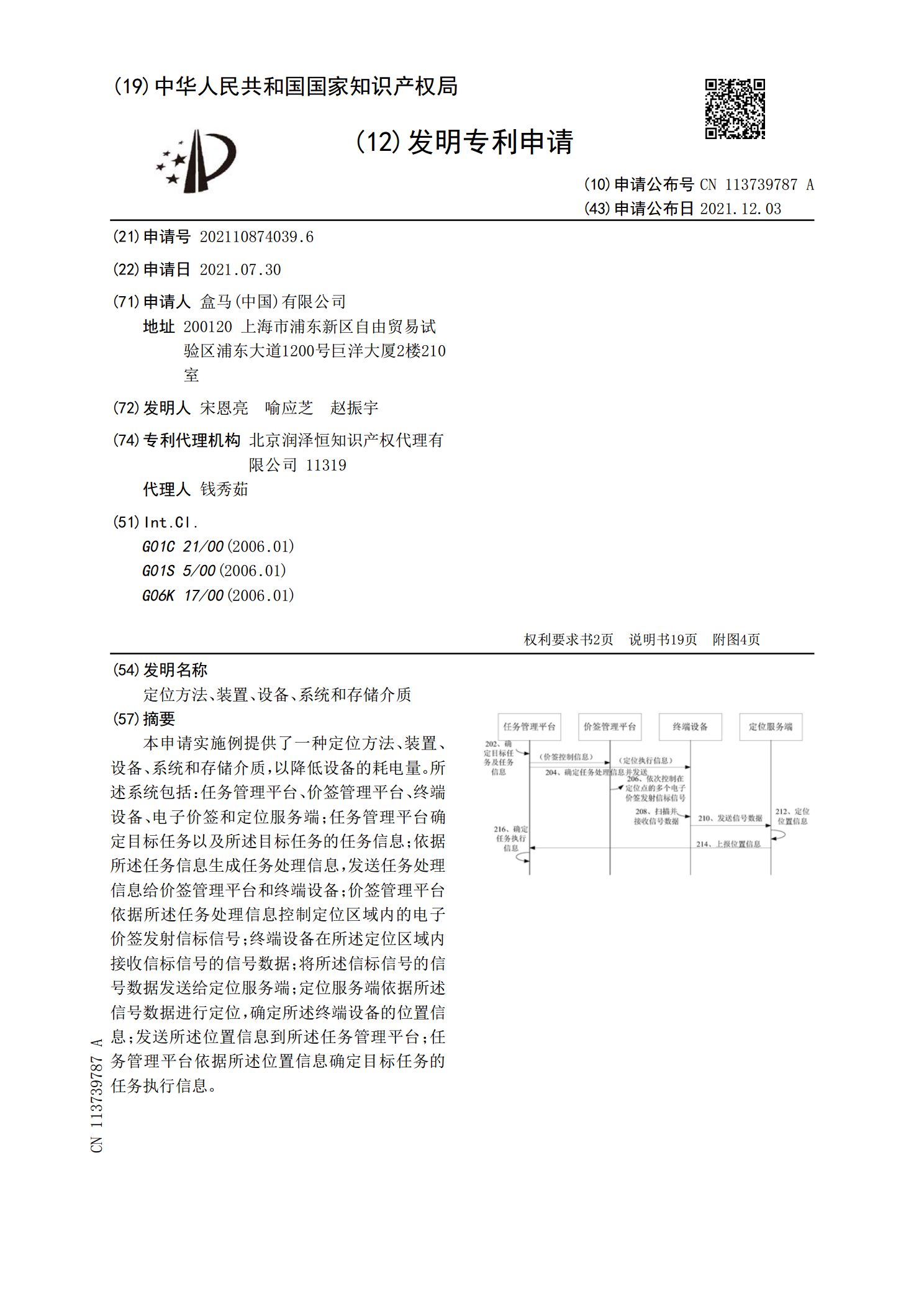
本申请实施例提供了一种定位方法、装置、设备、系统和存储介质,以降低设备的耗电量。所述系统包括:任务管理平台、价签管理平台、终端设备、电子价签和定位服务端;任务管理平台确定目标任务以及所述目标任务的任务信息;依据所述任务信息生成任务处理信息,发送任务处理信息给价签管理平台和终端设备;价签管理平台依据所述任务处理信息控制定位区域内的电子价签发射信标信号;终端设备在所述定位区域内接收信标信号的信号数据;将所述信标信号的信号数据发送给定位服务端;定位服务端依据所述信号数据进行定位,确定所述终端设备的位置信息;发送
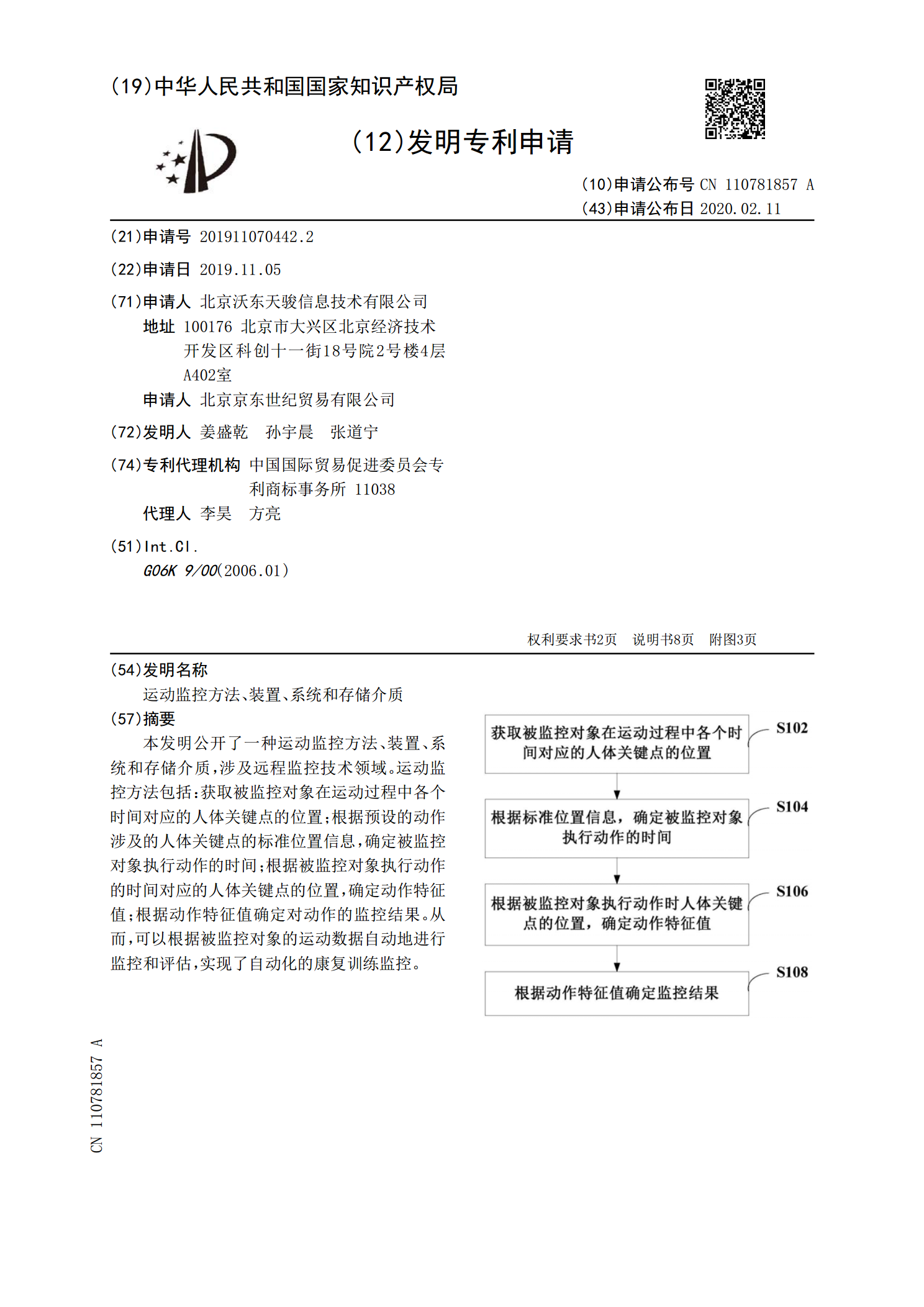
运动监控方法、装置、系统和存储介质.pdf
本发明公开了一种运动监控方法、装置、系统和存储介质,涉及远程监控技术领域。运动监控方法包括:获取被监控对象在运动过程中各个时间对应的人体关键点的位置;根据预设的动作涉及的人体关键点的标准位置信息,确定被监控对象执行动作的时间;根据被监控对象执行动作的时间对应的人体关键点的位置,确定动作特征值;根据动作特征值确定对动作的监控结果。从而,可以根据被监控对象的运动数据自动地进行监控和评估,实现了自动化的康复训练监控。
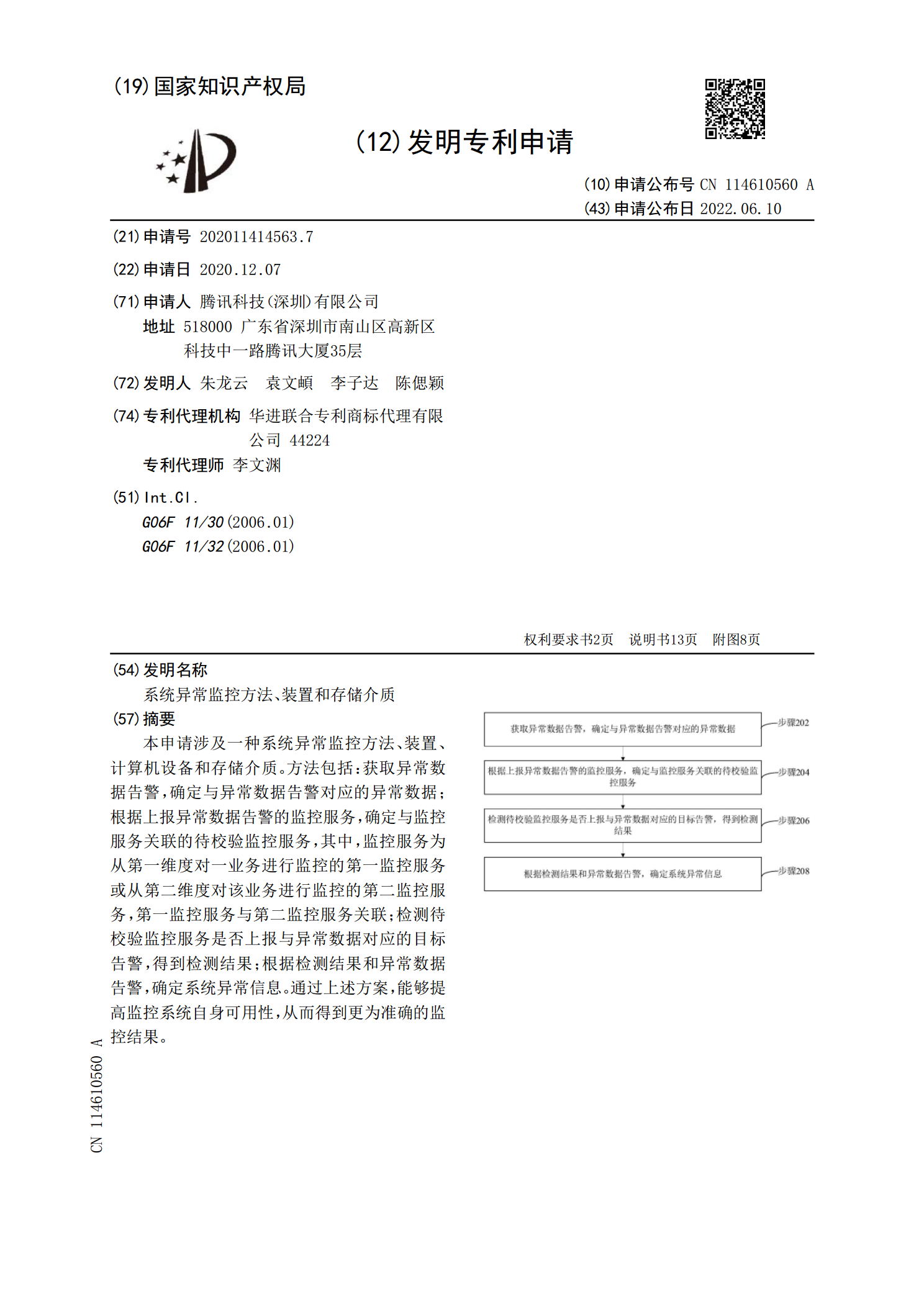
系统异常监控方法、装置和存储介质.pdf
本申请涉及一种系统异常监控方法、装置、计算机设备和存储介质。方法包括:获取异常数据告警,确定与异常数据告警对应的异常数据;根据上报异常数据告警的监控服务,确定与监控服务关联的待校验监控服务,其中,监控服务为从第一维度对一业务进行监控的第一监控服务或从第二维度对该业务进行监控的第二监控服务,第一监控服务与第二监控服务关联;检测待校验监控服务是否上报与异常数据对应的目标告警,得到检测结果;根据检测结果和异常数据告警,确定系统异常信息。通过上述方案,能够提高监控系统自身可用性,从而得到更为准确的监控结果。