
用于雷达与相机组合系统的相机标定、使用方法及设备.pdf

白真****ng

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于雷达与相机组合系统的相机标定、使用方法及设备.pdf
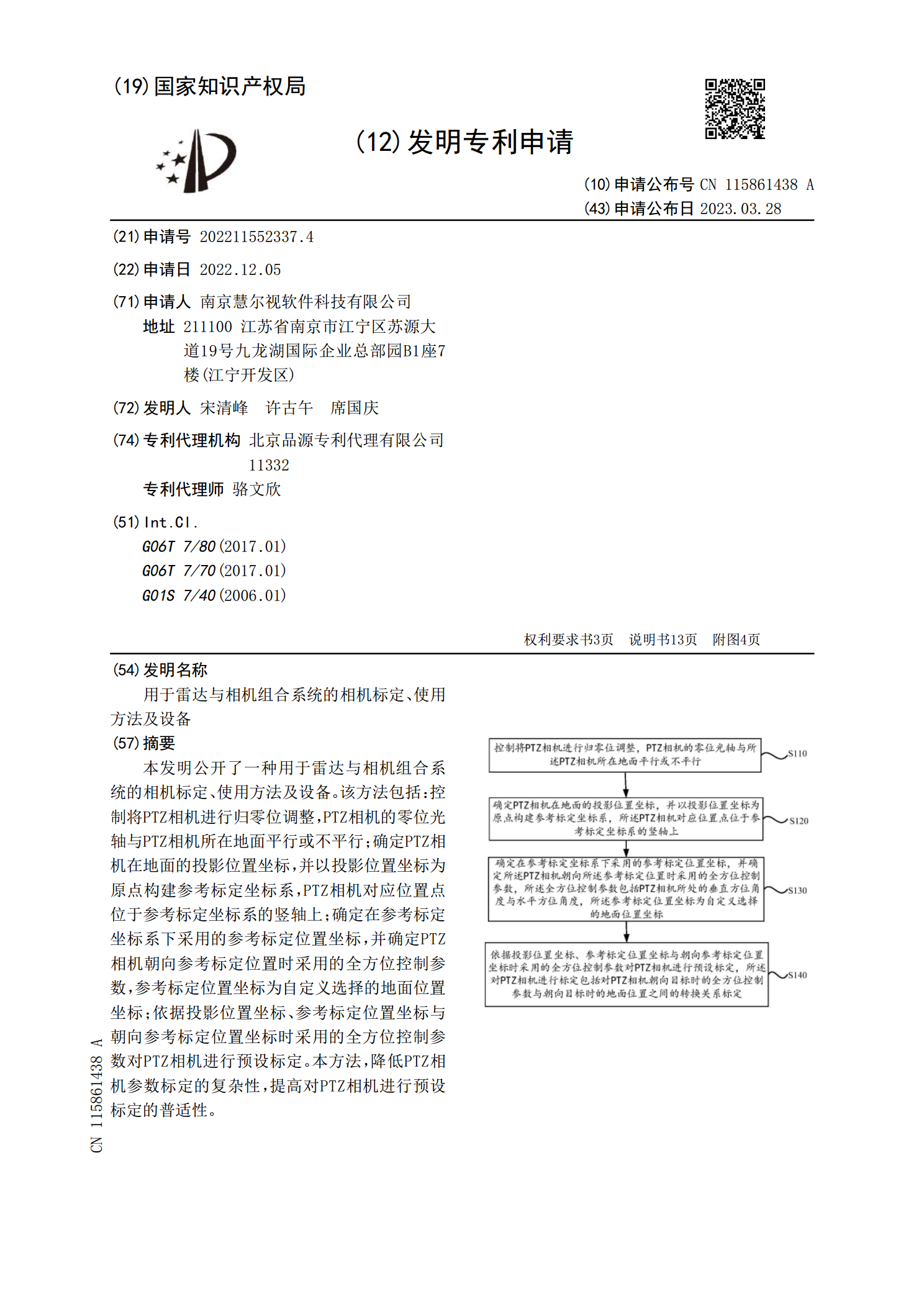
本发明公开了一种用于雷达与相机组合系统的相机标定、使用方法及设备。该方法包括:控制将PTZ相机进行归零位调整,PTZ相机的零位光轴与PTZ相机所在地面平行或不平行;确定PTZ相机在地面的投影位置坐标,并以投影位置坐标为原点构建参考标定坐标系,PTZ相机对应位置点位于参考标定坐标系的竖轴上;确定在参考标定坐标系下采用的参考标定位置坐标,并确定PTZ相机朝向参考标定位置时采用的全方位控制参数,参考标定位置坐标为自定义选择的地面位置坐标;依据投影位置坐标、参考标定位置坐标与朝向参考标定位置坐标时采用的全方位控制
相机标定板及其使用方法、相机标定的特征点提取方法.pdf
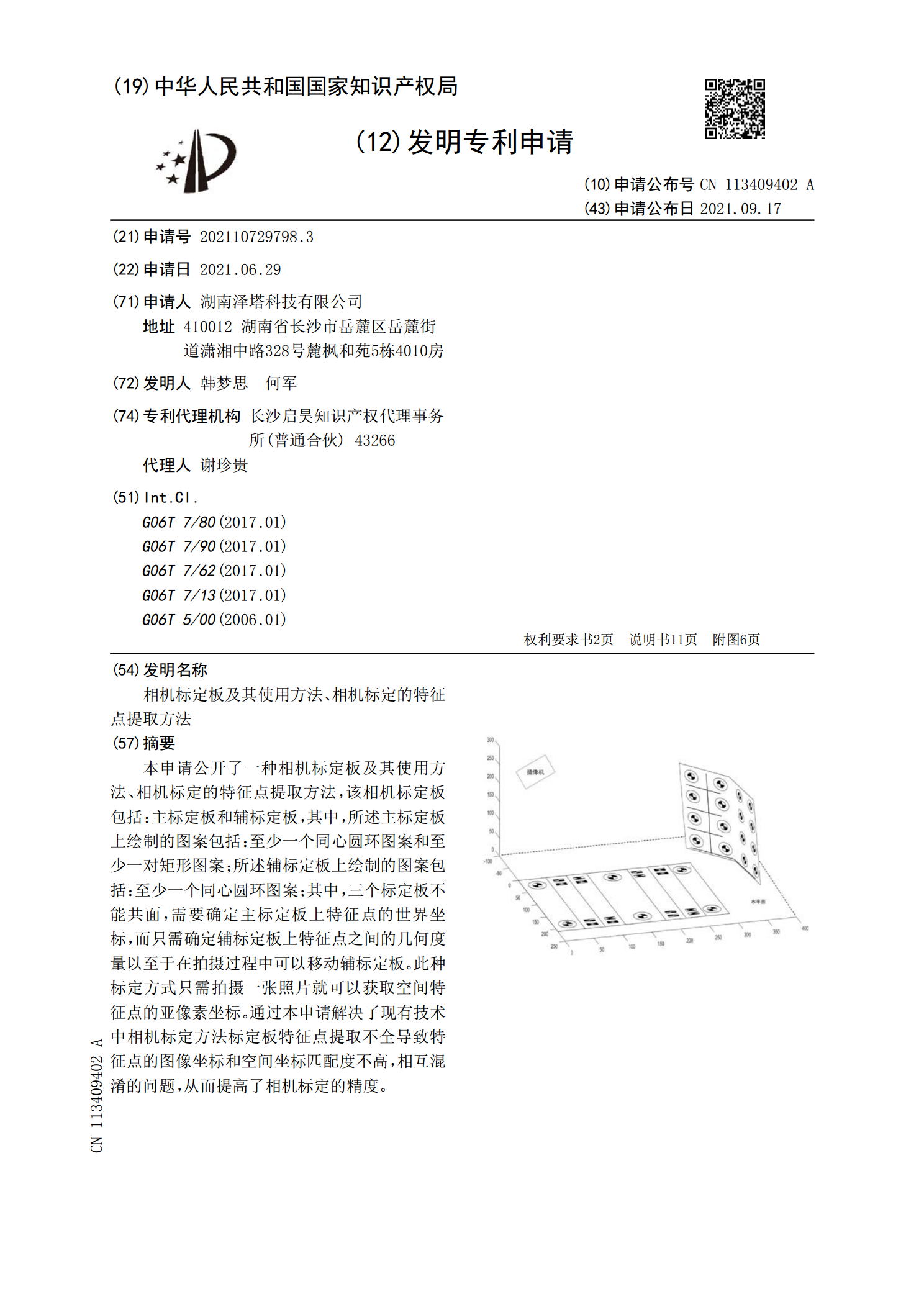
本申请公开了一种相机标定板及其使用方法、相机标定的特征点提取方法,该相机标定板包括:主标定板和辅标定板,其中,所述主标定板上绘制的图案包括:至少一个同心圆环图案和至少一对矩形图案;所述辅标定板上绘制的图案包括:至少一个同心圆环图案;其中,三个标定板不能共面,需要确定主标定板上特征点的世界坐标,而只需确定辅标定板上特征点之间的几何度量以至于在拍摄过程中可以移动辅标定板。此种标定方式只需拍摄一张照片就可以获取空间特征点的亚像素坐标。通过本申请解决了现有技术中相机标定方法标定板特征点提取不全导致特征点的图像坐标
激光雷达与相机联合外参标定系统及方法.pdf
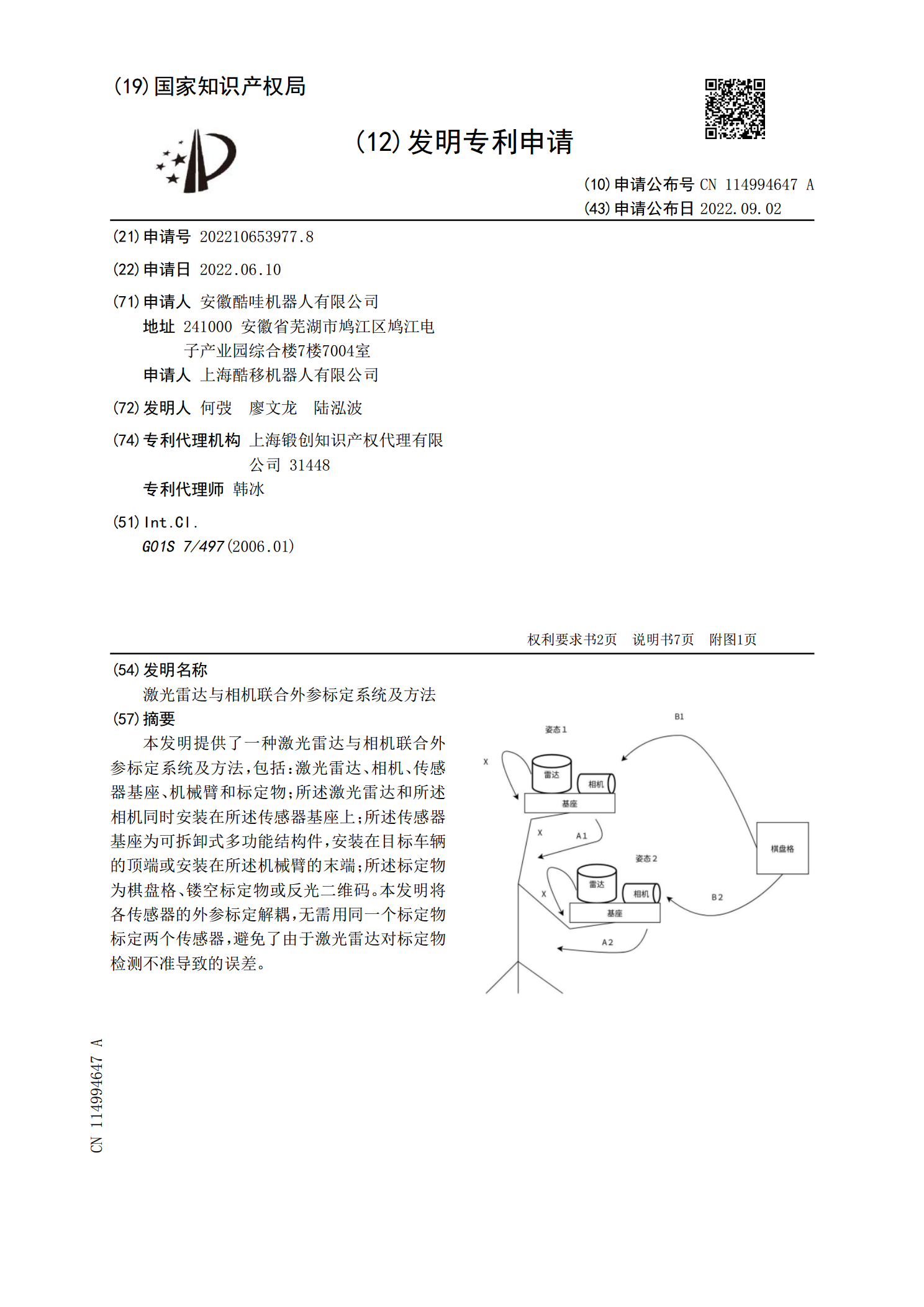
本发明提供了一种激光雷达与相机联合外参标定系统及方法,包括:激光雷达、相机、传感器基座、机械臂和标定物;所述激光雷达和所述相机同时安装在所述传感器基座上;所述传感器基座为可拆卸式多功能结构件,安装在目标车辆的顶端或安装在所述机械臂的末端;所述标定物为棋盘格、镂空标定物或反光二维码。本发明将各传感器的外参标定解耦,无需用同一个标定物标定两个传感器,避免了由于激光雷达对标定物检测不准导致的误差。

双目相机的立体标定方法、装置、系统及双目相机.pdf
本申请实施例公开了一种双目相机的立体标定方法、装置、系统及双目相机,属于计算机视觉技术领域。本方案中标定装置通过反向补光、漫反射面反射光线和热量,且保证散热,使标定板上的光线和热量均匀稳定,这样拍摄得到的可见光图像和热红外图像清晰。本方案中的立体标定方法,先将两台相机的成像规格统一,这样后续的立体标定能够准确有效。另外,在本方案中还对沿光轴方向的平移分量作减小处理,来确定两台相机各自的旋转量,后续基于确定的旋转量旋转校正图像后,能够保留更多的图像,保证了图像的可用性,也即保证了立体标定的可靠性。在将该立体

ROS系统下的相机标定研究.docx
ROS系统下的相机标定研究摘要:相机标定是机器人视觉系统中的一项重要任务,它通过确定摄像机的内部和外部参数来提高图像测量的准确性。本文针对ROS(RobotOperatingSystem)系统下的相机标定进行了研究,介绍了相机标定的基本原理和步骤,并详细讨论了在ROS系统中实现相机标定的方法和工具。通过实验和评估,验证了该方法的准确性和实用性。关键词:ROS系统,相机标定,内部参数,外部参数,实验评估引言近年来,机器人视觉系统在许多领域得到了广泛的应用,如自动驾驶、机器人导航、工业自动化等。在这些应用中,