
激光雷达与相机联合外参标定系统及方法.pdf

甲申****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光雷达与相机联合外参标定系统及方法.pdf
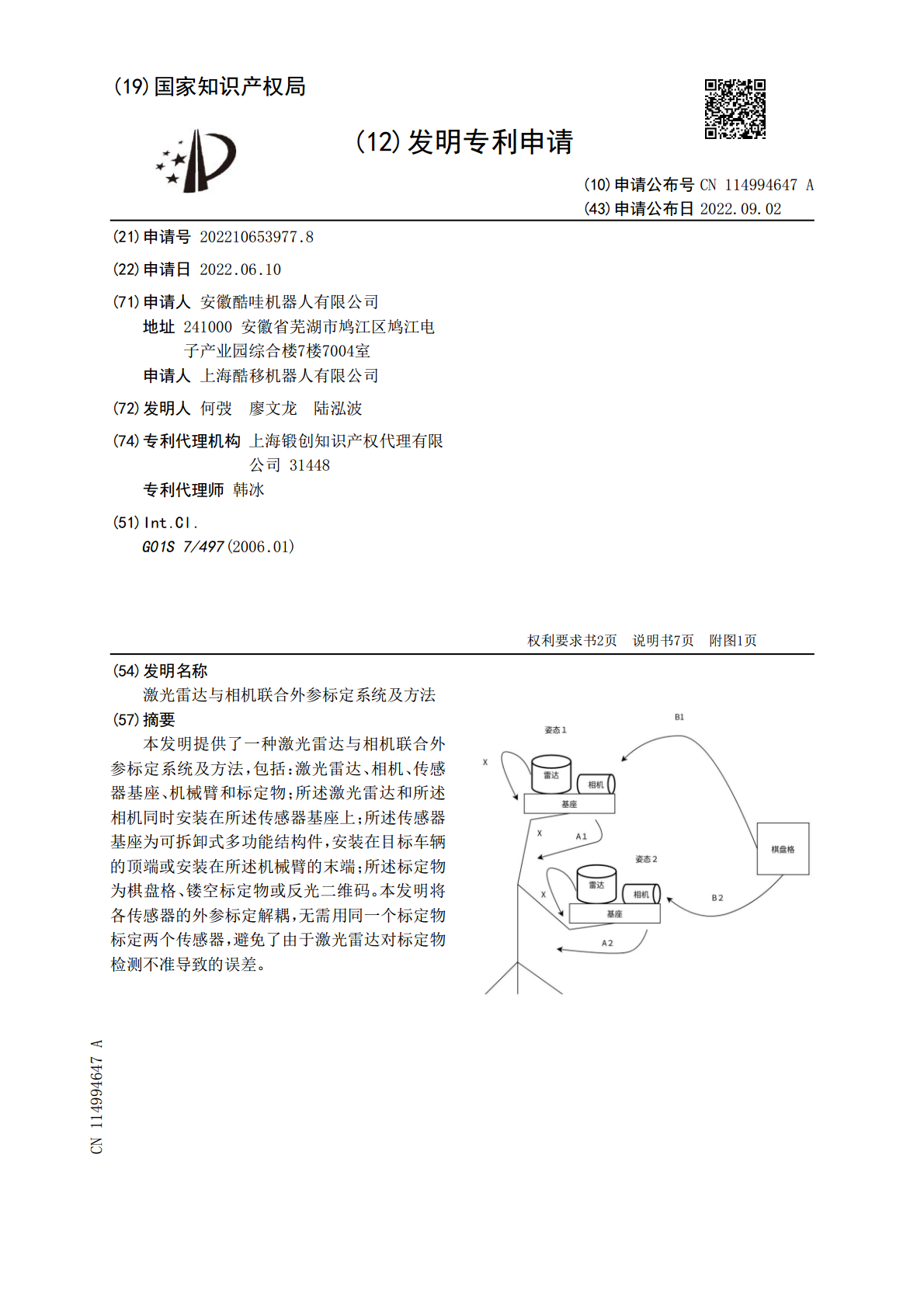
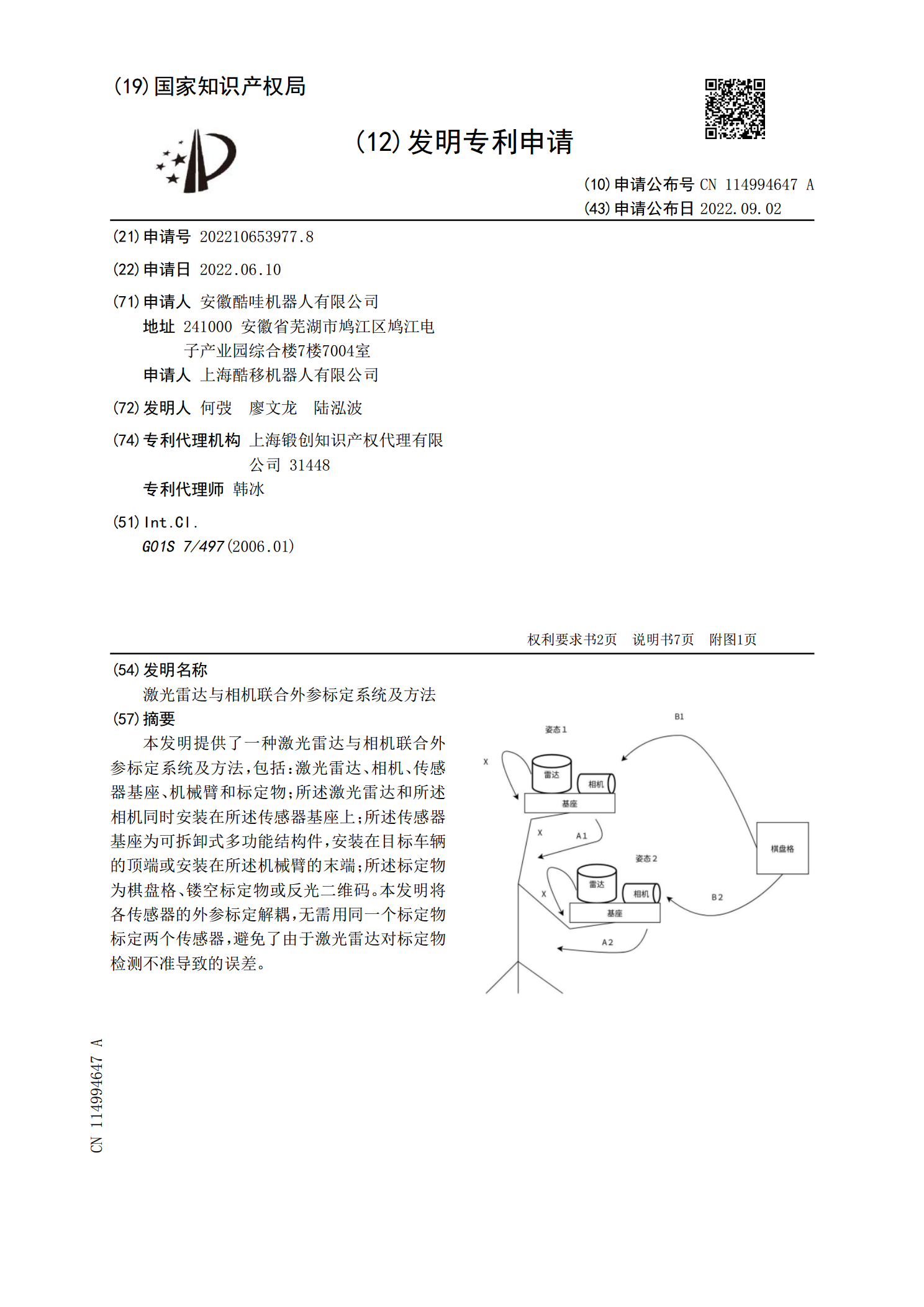
本发明提供了一种激光雷达与相机联合外参标定系统及方法,包括:激光雷达、相机、传感器基座、机械臂和标定物;所述激光雷达和所述相机同时安装在所述传感器基座上;所述传感器基座为可拆卸式多功能结构件,安装在目标车辆的顶端或安装在所述机械臂的末端;所述标定物为棋盘格、镂空标定物或反光二维码。本发明将各传感器的外参标定解耦,无需用同一个标定物标定两个传感器,避免了由于激光雷达对标定物检测不准导致的误差。
相机和激光雷达的外参标定方法、系统及可读存储介质.pdf
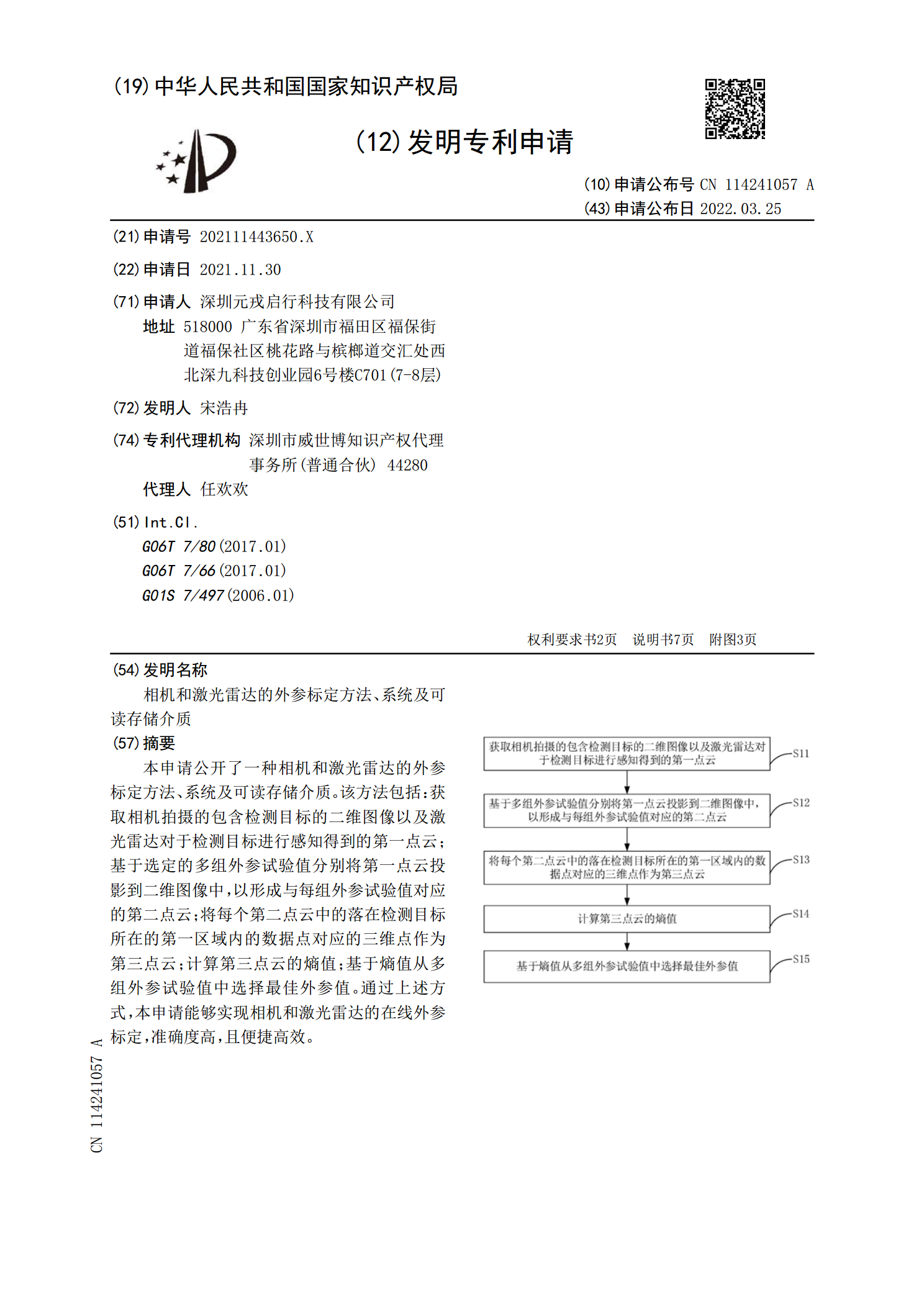
本申请公开了一种相机和激光雷达的外参标定方法、系统及可读存储介质。该方法包括:获取相机拍摄的包含检测目标的二维图像以及激光雷达对于检测目标进行感知得到的第一点云;基于选定的多组外参试验值分别将第一点云投影到二维图像中,以形成与每组外参试验值对应的第二点云;将每个第二点云中的落在检测目标所在的第一区域内的数据点对应的三维点作为第三点云;计算第三点云的熵值;基于熵值从多组外参试验值中选择最佳外参值。通过上述方式,本申请能够实现相机和激光雷达的在线外参标定,准确度高,且便捷高效。
相机外参标定方法、系统及装置.pdf
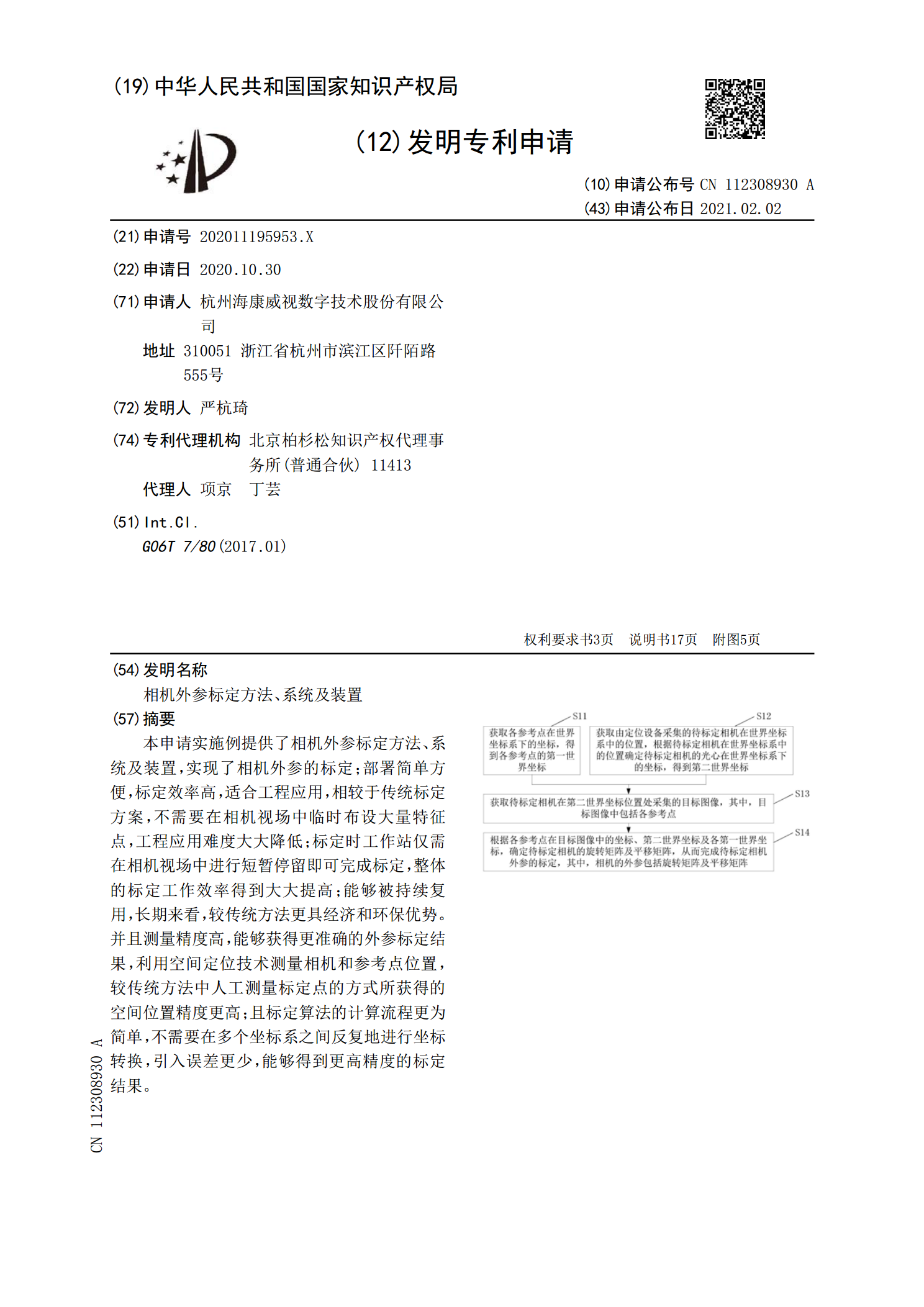
本申请实施例提供了相机外参标定方法、系统及装置,实现了相机外参的标定;部署简单方便,标定效率高,适合工程应用,相较于传统标定方案,不需要在相机视场中临时布设大量特征点,工程应用难度大大降低;标定时工作站仅需在相机视场中进行短暂停留即可完成标定,整体的标定工作效率得到大大提高;能够被持续复用,长期来看,较传统方法更具经济和环保优势。并且测量精度高,能够获得更准确的外参标定结果,利用空间定位技术测量相机和参考点位置,较传统方法中人工测量标定点的方式所获得的空间位置精度更高;且标定算法的计算流程更为简单,不需要
相机外参标定的系统和方法.pdf
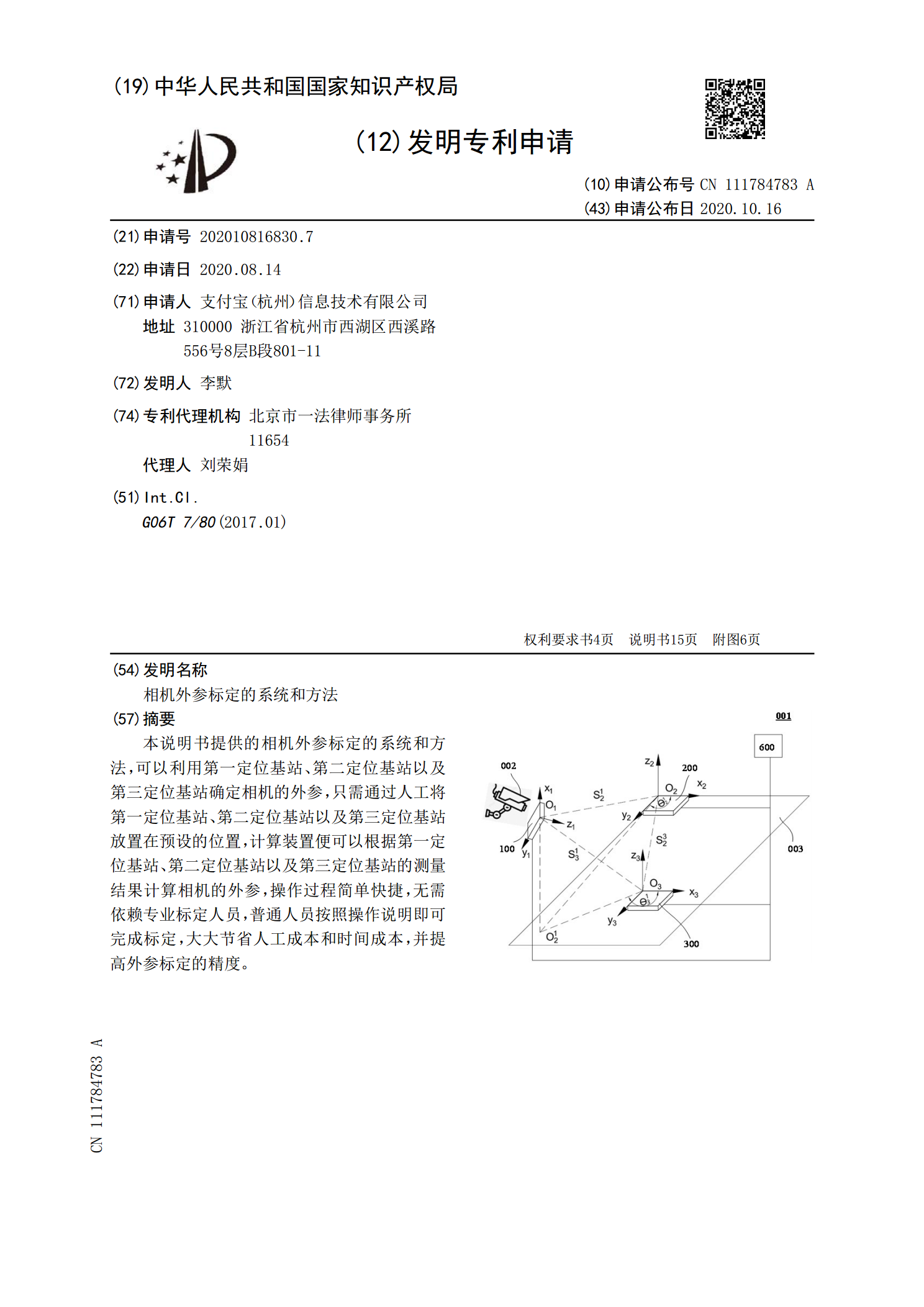
本说明书提供的相机外参标定的系统和方法,可以利用第一定位基站、第二定位基站以及第三定位基站确定相机的外参,只需通过人工将第一定位基站、第二定位基站以及第三定位基站放置在预设的位置,计算装置便可以根据第一定位基站、第二定位基站以及第三定位基站的测量结果计算相机的外参,操作过程简单快捷,无需依赖专业标定人员,普通人员按照操作说明即可完成标定,大大节省人工成本和时间成本,并提高外参标定的精度。

固态激光雷达与相机间外参标定方法研究.docx
固态激光雷达与相机间外参标定方法研究摘要:随着无人驾驶技术的发展,固态激光雷达以及相机成为无人驾驶系统中必不可少的传感器。同时,在使用这些传感器进行目标检测以及环境建模时,常常涉及到它们之间的外部参数标定问题。本文介绍了一种固态激光雷达与相机间外参标定的方法。该方法基于三角测量,通过基本矩阵计算出相机与激光雷达之间的外部参数。实验结果表明,该方法能够快速准确地完成固态激光雷达与相机间外部参数标定任务。关键词:固态激光雷达;相机;外参标定;基本矩阵;三角测量引言:固态激光雷达以及相机是现代无人驾驶技术中最常