
ROS系统下的相机标定研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

ROS系统下的相机标定研究.docx
ROS系统下的相机标定研究摘要:相机标定是机器人视觉系统中的一项重要任务,它通过确定摄像机的内部和外部参数来提高图像测量的准确性。本文针对ROS(RobotOperatingSystem)系统下的相机标定进行了研究,介绍了相机标定的基本原理和步骤,并详细讨论了在ROS系统中实现相机标定的方法和工具。通过实验和评估,验证了该方法的准确性和实用性。关键词:ROS系统,相机标定,内部参数,外部参数,实验评估引言近年来,机器人视觉系统在许多领域得到了广泛的应用,如自动驾驶、机器人导航、工业自动化等。在这些应用中,

一种全景相机系统的标定方法研究.docx
一种全景相机系统的标定方法研究一种全景相机系统的标定方法研究摘要:全景相机系统已经在许多领域得到广泛应用,例如虚拟现实、无人机航拍和安防监控等。为了提高全景相机的图像质量和准确度,需要对全景相机系统进行精确的标定。本论文研究了一种全景相机系统的标定方法,该方法能够准确地估计相机的内外参数,并且可以适用于各种不同的全景相机系统。实验结果表明,该方法能够有效地提高全景相机系统的图像质量和准确度。关键词:全景相机,标定方法,内外参数,图像质量,准确度1.引言全景相机系统是一种能够拍摄全景图像的相机系统,它能够捕

双目相机的立体标定方法、装置、系统及双目相机.pdf
本申请实施例公开了一种双目相机的立体标定方法、装置、系统及双目相机,属于计算机视觉技术领域。本方案中标定装置通过反向补光、漫反射面反射光线和热量,且保证散热,使标定板上的光线和热量均匀稳定,这样拍摄得到的可见光图像和热红外图像清晰。本方案中的立体标定方法,先将两台相机的成像规格统一,这样后续的立体标定能够准确有效。另外,在本方案中还对沿光轴方向的平移分量作减小处理,来确定两台相机各自的旋转量,后续基于确定的旋转量旋转校正图像后,能够保留更多的图像,保证了图像的可用性,也即保证了立体标定的可靠性。在将该立体
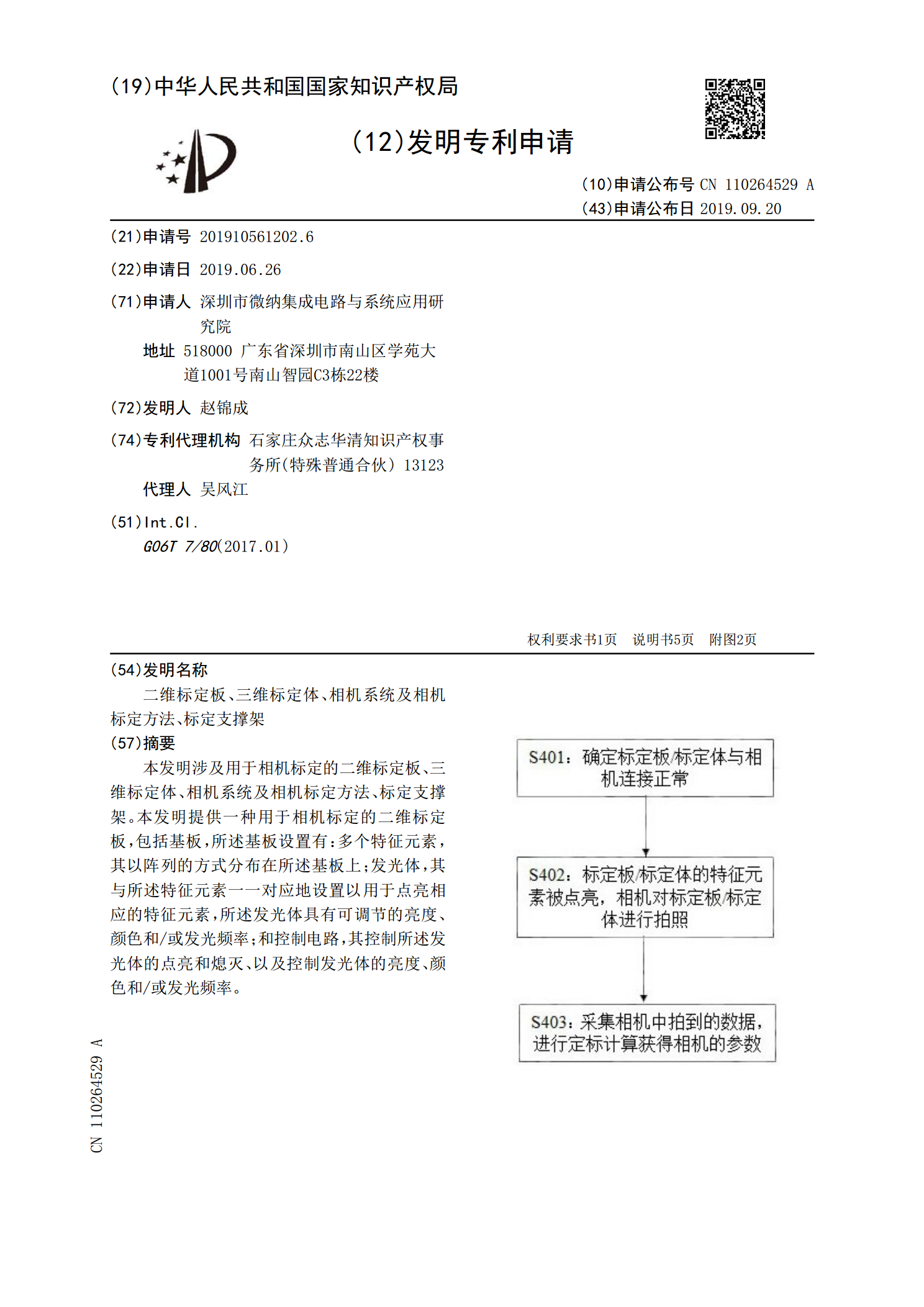
二维标定板、三维标定体、相机系统及相机标定方法、标定支撑架.pdf
本发明涉及用于相机标定的二维标定板、三维标定体、相机系统及相机标定方法、标定支撑架。本发明提供一种用于相机标定的二维标定板,包括基板,所述基板设置有:多个特征元素,其以阵列的方式分布在所述基板上;发光体,其与所述特征元素一一对应地设置以用于点亮相应的特征元素,所述发光体具有可调节的亮度、颜色和/或发光频率;和控制电路,其控制所述发光体的点亮和熄灭、以及控制发光体的亮度、颜色和/或发光频率。

基于场景的相机自标定研究.docx
基于场景的相机自标定研究摘要随着计算机视觉和机器学习的发展,相机自标定在物体识别、场景分析和机器人导航等方面被广泛应用。本论文旨在介绍基于场景的相机自标定研究的现状、问题和应用,以及未来可能的发展方向。我们综合了国内外的相关研究成果,分析其中的优点和缺点,探讨其应用实践,希望为相机自标定的研究和实践提供一些有益的思考和启示。关键词:相机自标定、基于场景、物体识别、场景分析、机器人导航引言相机自标定是指在不依赖外界传感器的情况下,仅使用相机自己的数据和内部参数,估计出相机的内部和外部参数。其优点在于不受外部