
一种智能车辆主动悬架调节系统及方法.pdf

Ch****75

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能车辆主动悬架调节系统及方法.pdf
本发明公开了一种智能车辆主动悬架调节系统,其与车辆的悬架系统连接,该智能车辆主动悬架调节系统包括:车端环境感知装置,其实时检测各车辆所行驶路段的路面异常信息;高精度定位模块,其实时获取各车辆所处的位置信息;路面状态感知模块,其将路面异常信息和与之对应的位置信息融合,以得到含有路面异常状态信息的消息集;云端数据平台,其对各消息集的数据进行分析、清洗和/或聚合,以确定路面异常状态的类型、大小及其所处的位置;车端规划和控制模块,其基于云端数据平台下发的路面异常状态的类型、大小及其所处的位置调节自身车辆悬架系统的

汽车后轮悬架主动调节系统及调节方法.pdf
本发明涉及汽车悬架领域,提供一种汽车后轮悬架主动调节系统及调节方法,所述汽车后轮悬架主动调节系统包括:用于测量前轮减震器的伸缩长度的位移传感器,用于对后轮提供支撑和减震的后轮减震器,所述后轮减震器为可变阻尼减震器,控制器,所述控制器分别与位移传感器和后轮减震器电连接,所述控制器根据所述位移传感器的测量信号调整所述后轮减震器的阻尼。本发明的汽车后轮悬架主动调节系统及调节方法通过对前轮减震器的伸缩长度进行测量,一方面,前轮减震器的伸缩长度能够最为直接、真实的反映出路面情况,从而提高控制的精准度,另一方面,简化
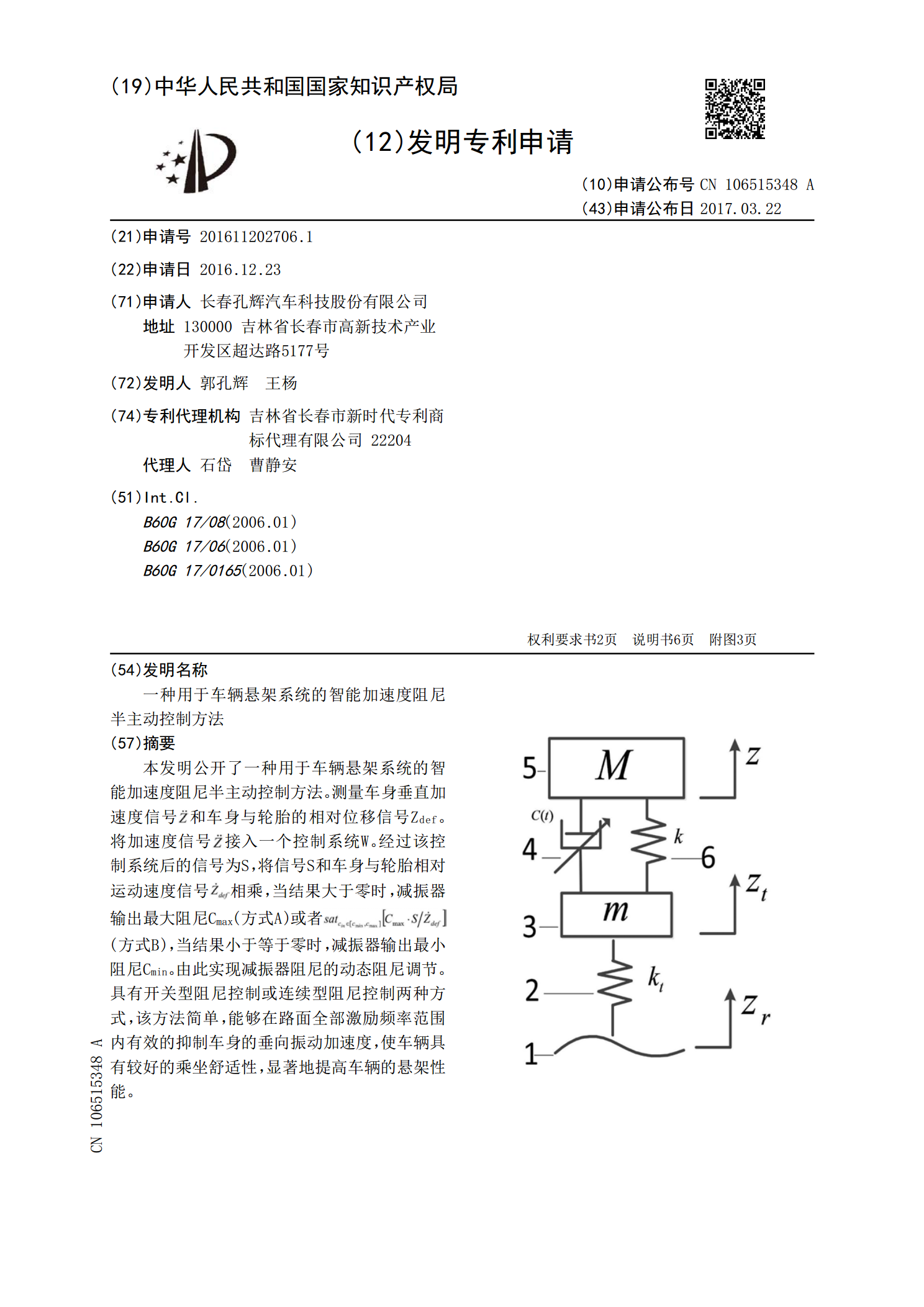
一种用于车辆悬架系统的智能加速度阻尼半主动控制方法.pdf
本发明公开了一种用于车辆悬架系统的智能加速度阻尼半主动控制方法。测量车身垂直加速度信号和车身与轮胎的相对位移信号Z
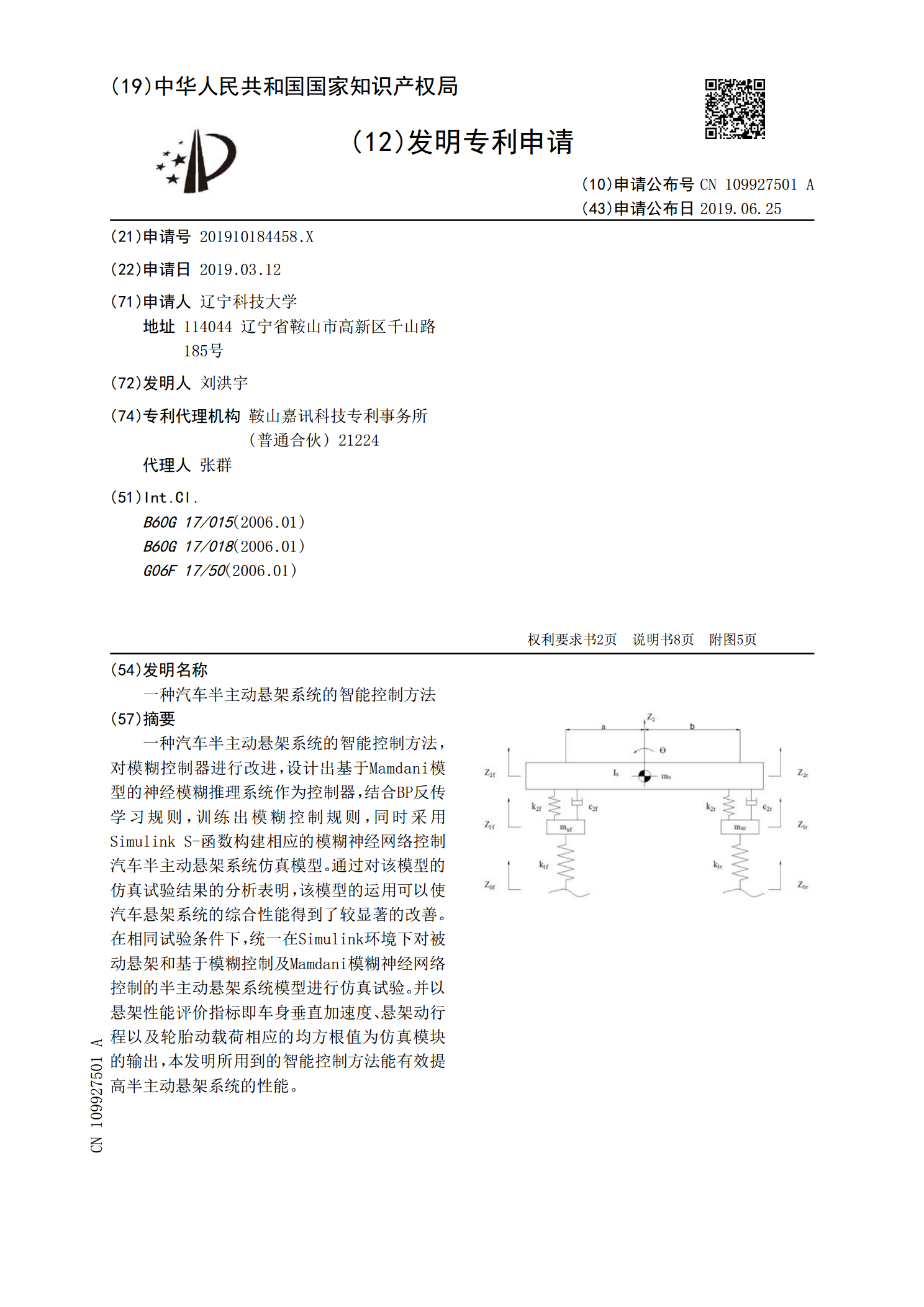
一种汽车半主动悬架系统的智能控制方法.pdf
一种汽车半主动悬架系统的智能控制方法,对模糊控制器进行改进,设计出基于Mamdani模型的神经模糊推理系统作为控制器,结合BP反传学习规则,训练出模糊控制规则,同时采用SimulinkS‑函数构建相应的模糊神经网络控制汽车半主动悬架系统仿真模型。通过对该模型的仿真试验结果的分析表明,该模型的运用可以使汽车悬架系统的综合性能得到了较显著的改善。在相同试验条件下,统一在Simulink环境下对被动悬架和基于模糊控制及Mamdani模糊神经网络控制的半主动悬架系统模型进行仿真试验。并以悬架性能评价指标即车身垂

主动悬架系统以及车辆.pdf
本发明公开了一种主动悬架总成以及车辆,所述主动悬架系统包括:所述检测部件适于检测前方行驶路况生成并发送行驶信号;所述控制器适于接收所述行驶信号,根据行驶信号判定前方路况,并在前方路面起伏时提前调整所述悬架总成的减震器的高度。根据本发明实施例的主动悬架系统,通过检测部件检测前方的行驶路况(即路面信息)。这样,使主动悬架系统可以提前感知到前方路面信息,从而使主动悬架系统可以实时地调整悬架总成的高度,提高悬架总成的响应速度,进而降低主动悬架系统的滞留性,使主动悬架系统的调整效果更好。