
一种用于车辆悬架系统的智能加速度阻尼半主动控制方法.pdf

春波****公主

1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于车辆悬架系统的智能加速度阻尼半主动控制方法.pdf
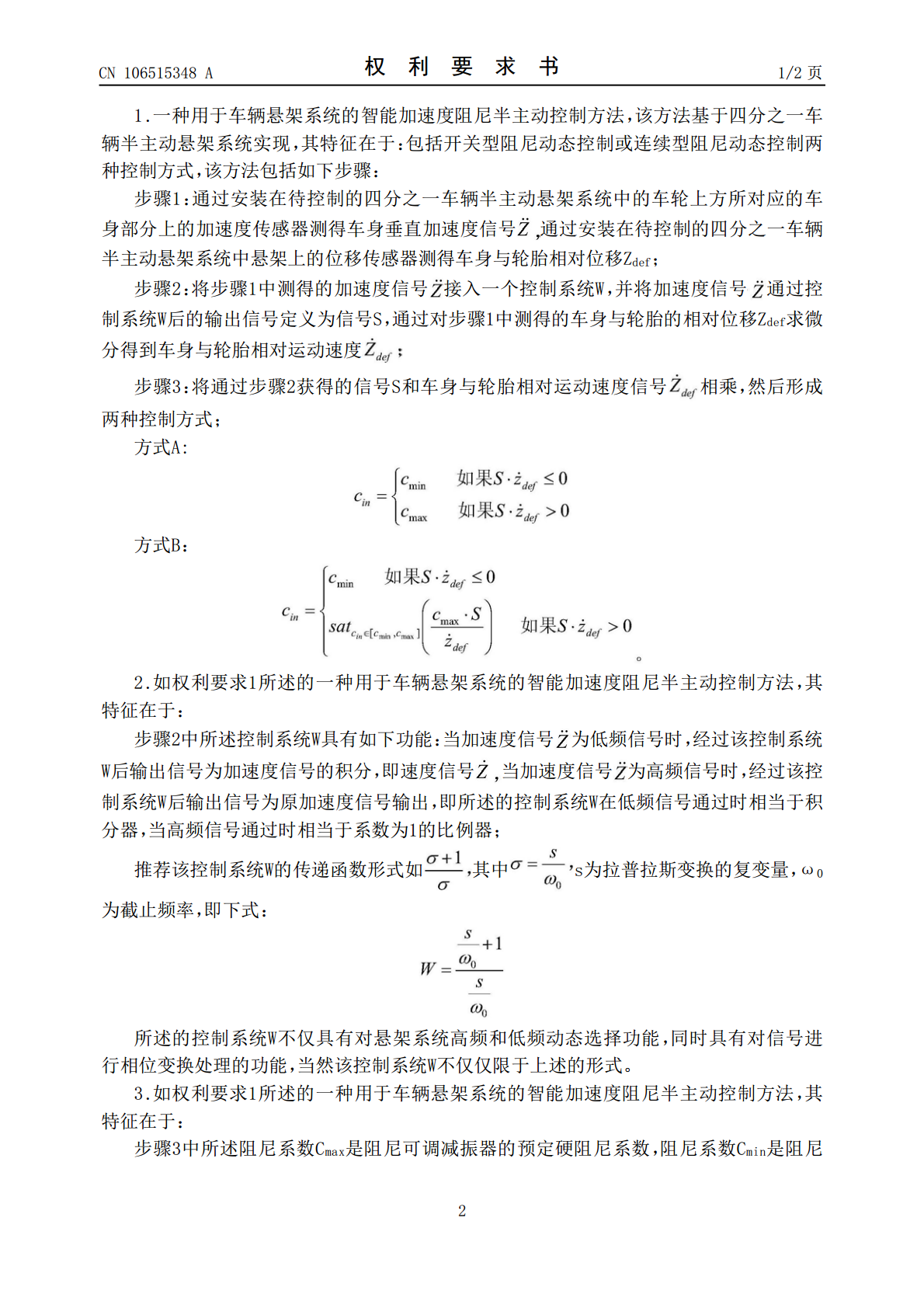
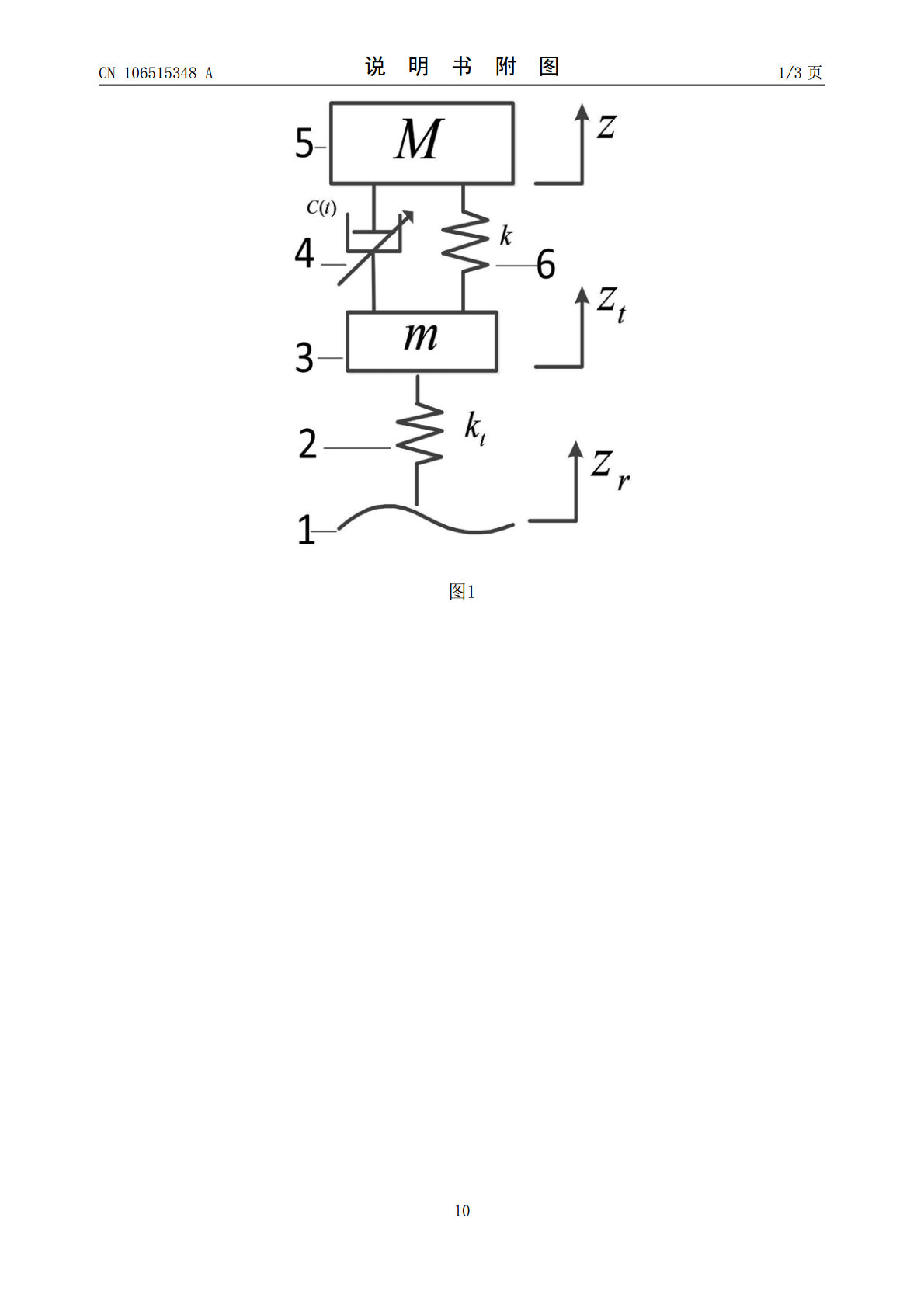
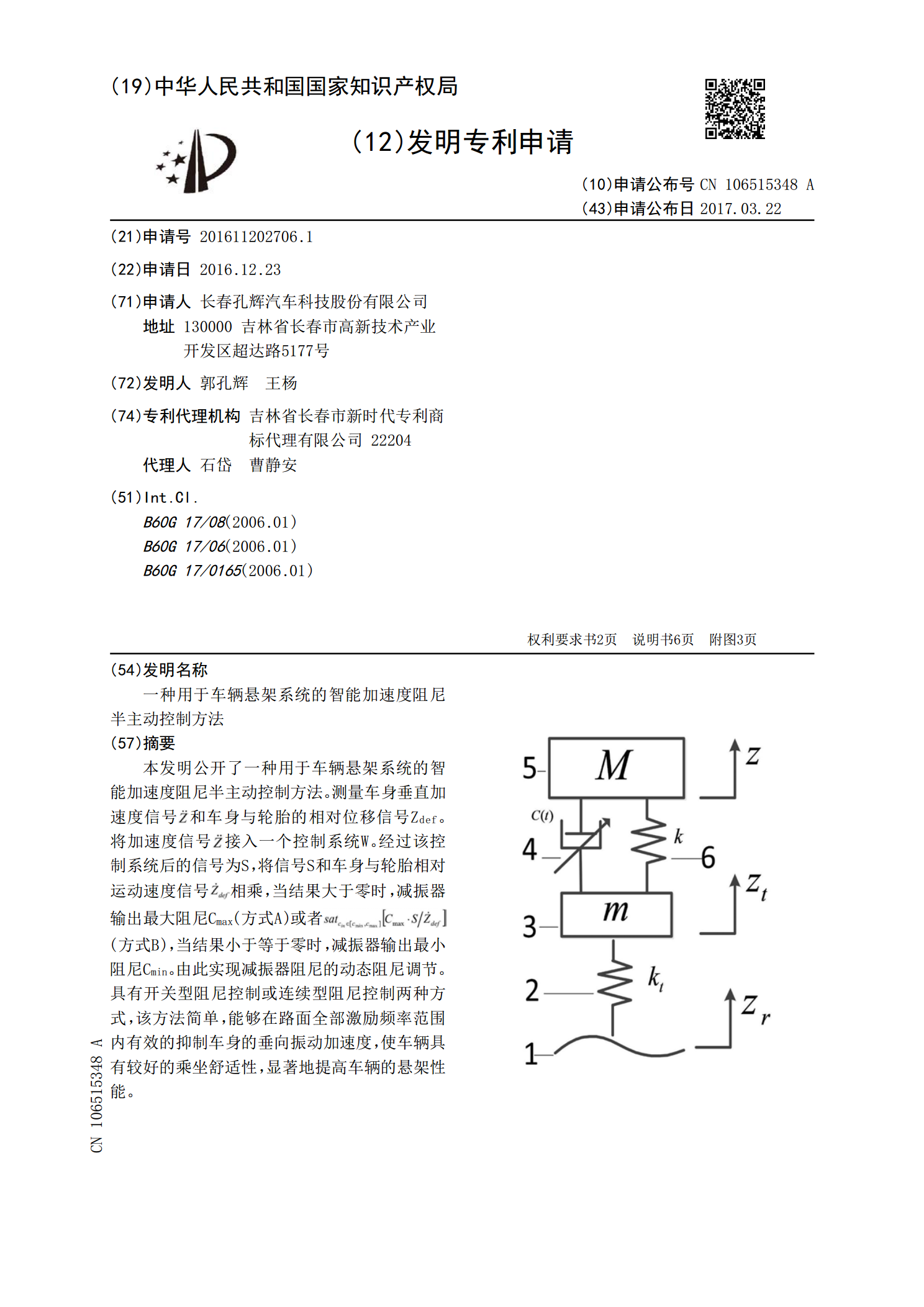
本发明公开了一种用于车辆悬架系统的智能加速度阻尼半主动控制方法。测量车身垂直加速度信号和车身与轮胎的相对位移信号Z

用于车辆的可变阻尼半主动悬架系统的控制方法.pdf
本公开描述了一种用于车辆的可变阻尼半主动悬架系统的控制方法,其包括以下步骤:测得车辆的簧上质量加速度、簧下质量加速度、悬架变形、以及轮胎变形四种目标响应信号;以离散型状态空间方程形式建立可变阻尼半主动悬架的系统模型,基于模型预测控制算法建立系统模型中的关于四种目标响应信号的四种控制方案;基于人工蜂群算法分别获得四种控制方案中的参数矩阵的最优解;求得四种目标响应信号的归一化响应信号,并对四种归一化响应信号进行比较,以动态选择出四种控制方案中的最优控制方案并对车辆施加控制。由此,能够显著提升对车辆的控制效果,
一种汽车半主动悬架系统的智能控制方法.pdf
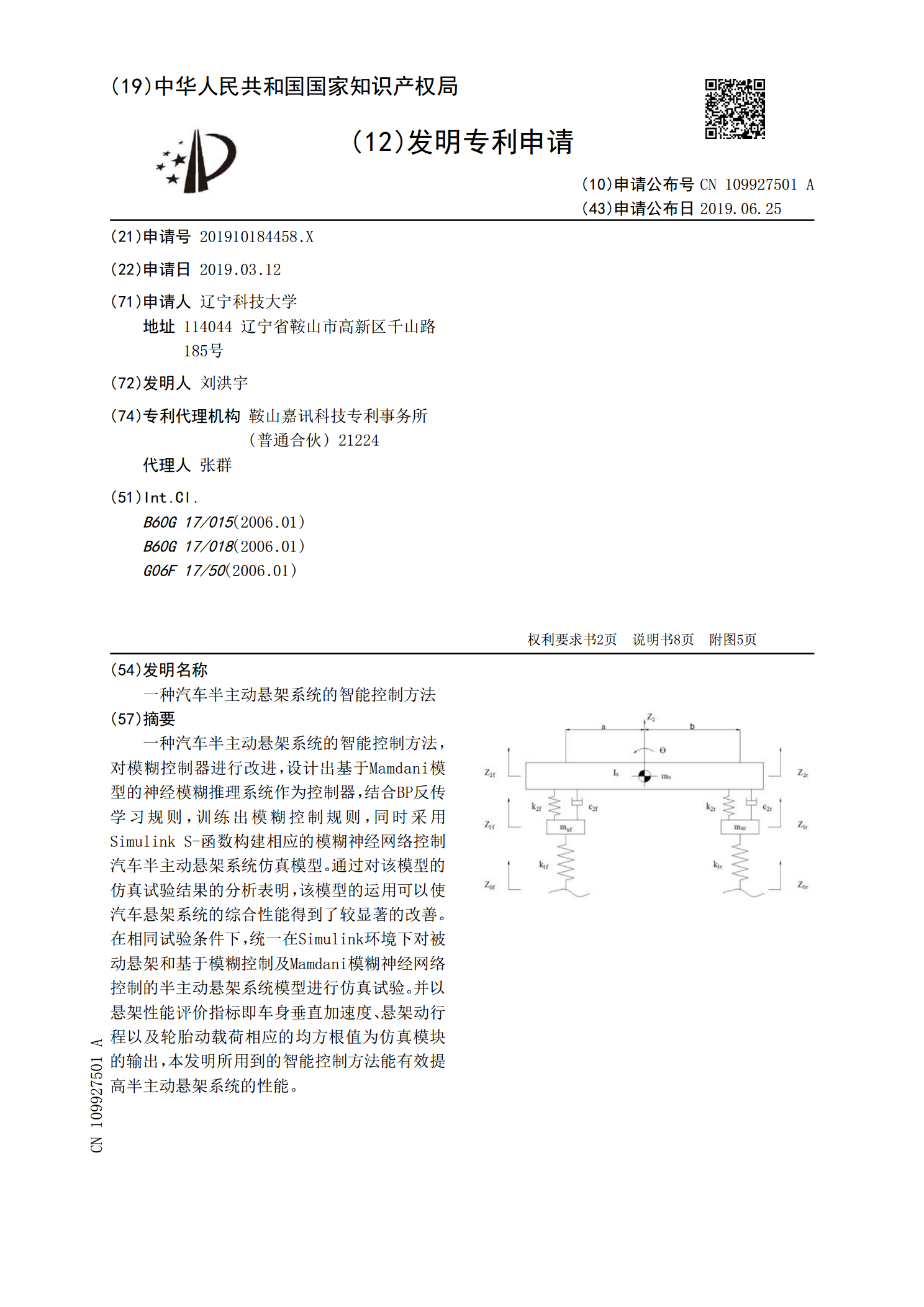
一种汽车半主动悬架系统的智能控制方法,对模糊控制器进行改进,设计出基于Mamdani模型的神经模糊推理系统作为控制器,结合BP反传学习规则,训练出模糊控制规则,同时采用SimulinkS‑函数构建相应的模糊神经网络控制汽车半主动悬架系统仿真模型。通过对该模型的仿真试验结果的分析表明,该模型的运用可以使汽车悬架系统的综合性能得到了较显著的改善。在相同试验条件下,统一在Simulink环境下对被动悬架和基于模糊控制及Mamdani模糊神经网络控制的半主动悬架系统模型进行仿真试验。并以悬架性能评价指标即车身垂

一种车辆半主动悬架天棚阻尼频率滤波控制策略.pdf
本发明涉及一种车辆半主动悬架天棚阻尼频率滤波控制方法。它利用车身加速度、车身高度、节气门开度、车辆转向角、车速传感器及制动信号实时检测悬架及车身运动状态,为电控悬架控制器提供计算控制数据。当车辆处于正常行驶状态,控制器执行天棚阻尼滤波控制算法,在提高舒适性的同时兼顾安全性;当传感器检测到车辆处于急转弯、急刹车、急加速工况,控制器中断天棚阻尼频率滤波控制,把悬架多级可调减振器的阻尼值调至最硬,以减少车身的大侧倾、点头、后座现象。该控制方法采用频率滤波控制算法,有效地控制了纯天棚阻尼控制悬架处于中高频激振时轮

基于磁流变阻尼器的车辆半主动悬架智能控制研究的综述报告.docx
基于磁流变阻尼器的车辆半主动悬架智能控制研究的综述报告随着人们对于车辆乘坐舒适性和安全性越来越重视,车辆悬挂系统的研究也变得愈发重要。在悬挂系统的研究中,半主动悬挂系统由于具有较好的安全性和乘坐舒适性而备受关注。而磁流变阻尼器是一种常用于半主动悬挂系统的元件,本文将以此为基础,对于车辆半主动悬挂智能控制的研究进行综述。磁流变阻尼器(Magnetorheological(MR)Damper)是一种将流变性体作为阻尼剂的阻尼器。MR阻尼器能够通过改变电磁场的强度来调整阻尼器内部流变材料颗粒的排布,从而控制车辆