
一种汽车半主动悬架系统的智能控制方法.pdf

论文****酱吖

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种汽车半主动悬架系统的智能控制方法.pdf
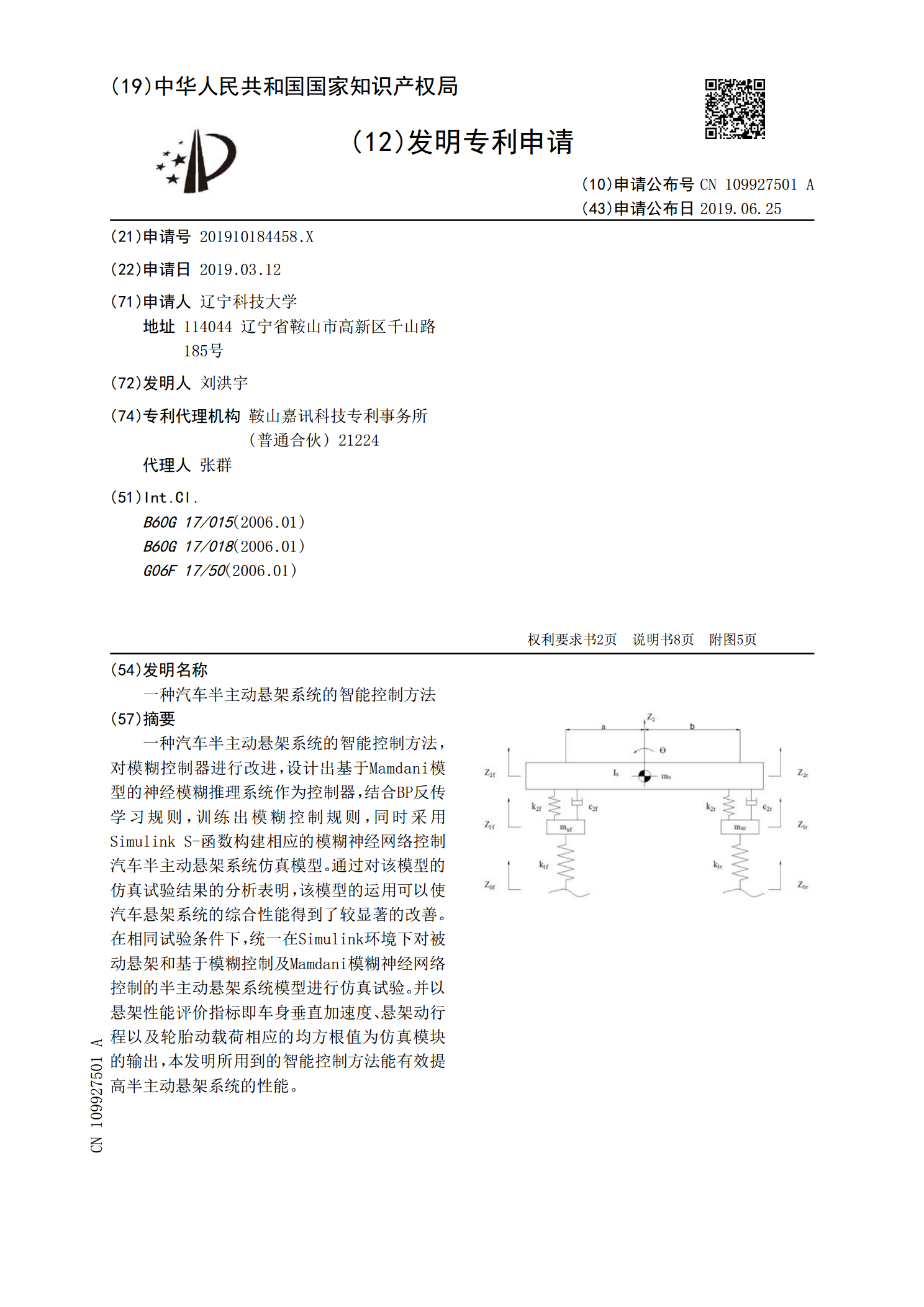
一种汽车半主动悬架系统的智能控制方法,对模糊控制器进行改进,设计出基于Mamdani模型的神经模糊推理系统作为控制器,结合BP反传学习规则,训练出模糊控制规则,同时采用SimulinkS‑函数构建相应的模糊神经网络控制汽车半主动悬架系统仿真模型。通过对该模型的仿真试验结果的分析表明,该模型的运用可以使汽车悬架系统的综合性能得到了较显著的改善。在相同试验条件下,统一在Simulink环境下对被动悬架和基于模糊控制及Mamdani模糊神经网络控制的半主动悬架系统模型进行仿真试验。并以悬架性能评价指标即车身垂

汽车半主动悬架系统的频域控制方法.pdf
本发明公开了一种汽车半主动悬架系统的频域控制方法,包括:测车身垂直加速度通过车身垂直加速度求车身垂直加速度变化率和车身垂直速度计算第一、第三、第五不动点所分别对应的频率值f1、f3、f5;令fc分别取f1、f3、f5,计算判定振动频率f所属频段范围,从而设置减振器的阻尼系数取值。本发明以车身垂直加速度、车轮动载荷、悬架动挠度的频域传递特性为基础,可自适应地判别悬架系统振动所属频段范围,从而施加相应的阻尼,在整个频域上都能达到较好的控制性能,显著地提高车辆的悬架性能。

汽车磁流变半主动悬架减振器及控制方法.pdf
本发明涉及车辆悬架领域,提供一种汽车磁流变半主动悬架减振器包括活塞杆、底阀组件、活塞组件、减振器本体、控制模块,减振器本体为中空管状同轴地内套有内筒,减振器本体与内筒之间形成有储液腔,其一端与汽车车轮固定连接,另一端与汽车车架连接,底阀组件固定设置在减振器本体靠近汽车车轮的一端,活塞组件设置在减振器本体内,活塞组件可自由沿所述内筒轴线方向滑动,内筒内壁设置有导轨,活塞组件朝远离底阀组件的一端与活塞杆连接,储液腔与内筒内部充满磁流变液,不仅结构紧凑、简单,且改善减振器内部阻尼特性,本发明同时应用了一种基于此

汽车半主动悬架系统实时最佳阻尼控制算法.pdf
本发明涉及连续控制式半主动悬架系统最佳阻尼的控制算法,是为更好地满足人们对乘坐舒适性和汽车行驶安全性要求而研发的。利用传感器测得车身振动加速度信号、车速信号和转角信号,根据传感器所测得的信号感知车辆当前行驶路况及悬架系统阻尼比;根据测得的车身和车轮振动加速度,得到车身和车轮垂直运动速度及它们之间的相对运动速度;根据车辆参数确定出当前车速和路况下所要求的减振器最佳阻尼系数和阻尼力,并通过控制器输出步进电机转角控制信号,控制调节可控减振器阻尼节流孔的面积,使半主动悬架系统达到所要求的最佳阻尼和阻尼力。本发明所
汽车磁流变半主动悬架控制系统设计.pdf
�第33卷第12期合肥工业大学学报(自然科学版)Vol.33No.12��2010年12月JOURNALOFHEFEIUNIVERSITYOFTECHNOLOGYDec.2010�Doi:10.3969/j.issn.1003�5060.2010.12.002汽车磁流变半主动悬架控制系统设计夏�光1,2,�唐希雯3,�汪韶杰1,�孙保群1(1.合肥工业大学汽车工程技术研究院,安徽合肥�230009;2.合肥工业大学机械与汽车工程学院,安徽合肥�230009;3.解放军电子工程学院信息工程系,安徽合肥�23