
基于水下声呐定位的船舶清洗方法、系统及介质.pdf

小新****ou


1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于水下声呐定位的船舶清洗方法、系统及介质.pdf
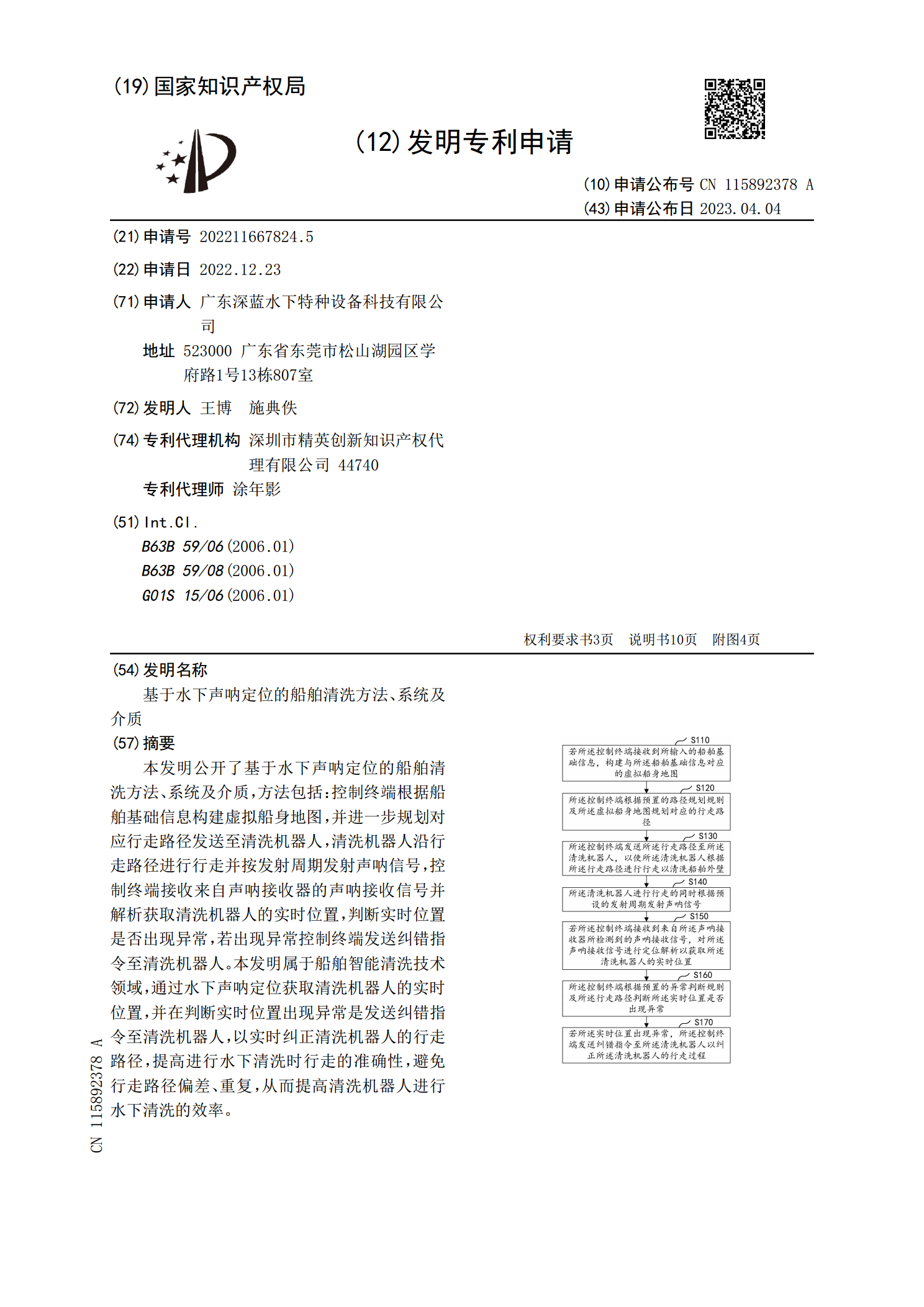
本发明公开了基于水下声呐定位的船舶清洗方法、系统及介质,方法包括:控制终端根据船舶基础信息构建虚拟船身地图,并进一步规划对应行走路径发送至清洗机器人,清洗机器人沿行走路径进行行走并按发射周期发射声呐信号,控制终端接收来自声呐接收器的声呐接收信号并解析获取清洗机器人的实时位置,判断实时位置是否出现异常,若出现异常控制终端发送纠错指令至清洗机器人。本发明属于船舶智能清洗技术领域,通过水下声呐定位获取清洗机器人的实时位置,并在判断实时位置出现异常是发送纠错指令至清洗机器人,以实时纠正清洗机器人的行走路径,提高进
基于声呐图像的AI水下目标检测与定位方法.pdf
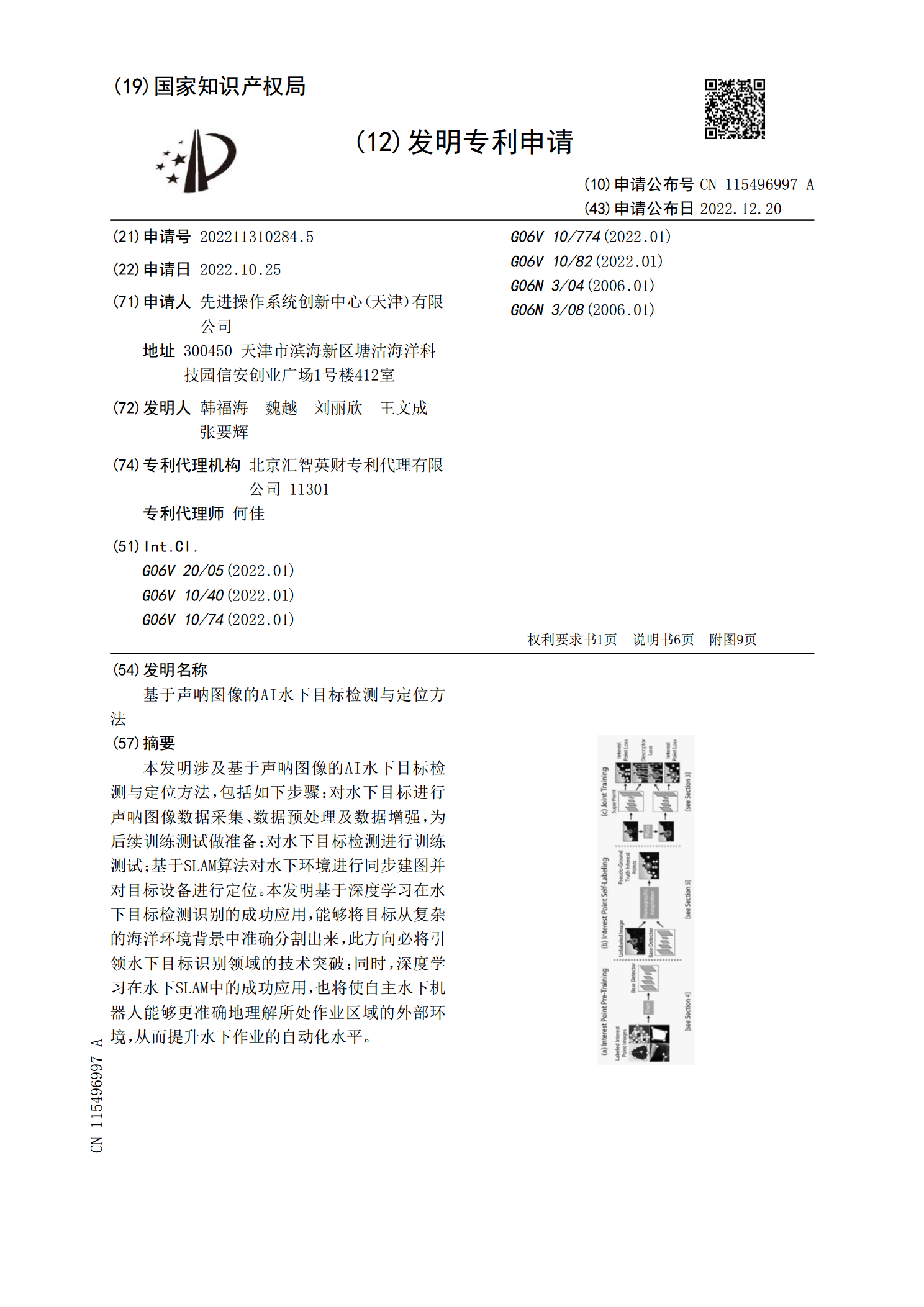
本发明涉及基于声呐图像的AI水下目标检测与定位方法,包括如下步骤:对水下目标进行声呐图像数据采集、数据预处理及数据增强,为后续训练测试做准备;对水下目标检测进行训练测试;基于SLAM算法对水下环境进行同步建图并对目标设备进行定位。本发明基于深度学习在水下目标检测识别的成功应用,能够将目标从复杂的海洋环境背景中准确分割出来,此方向必将引领水下目标识别领域的技术突破;同时,深度学习在水下SLAM中的成功应用,也将使自主水下机器人能够更准确地理解所处作业区域的外部环境,从而提升水下作业的自动化水平。
一种船舶水下清洗系统和方法.pdf
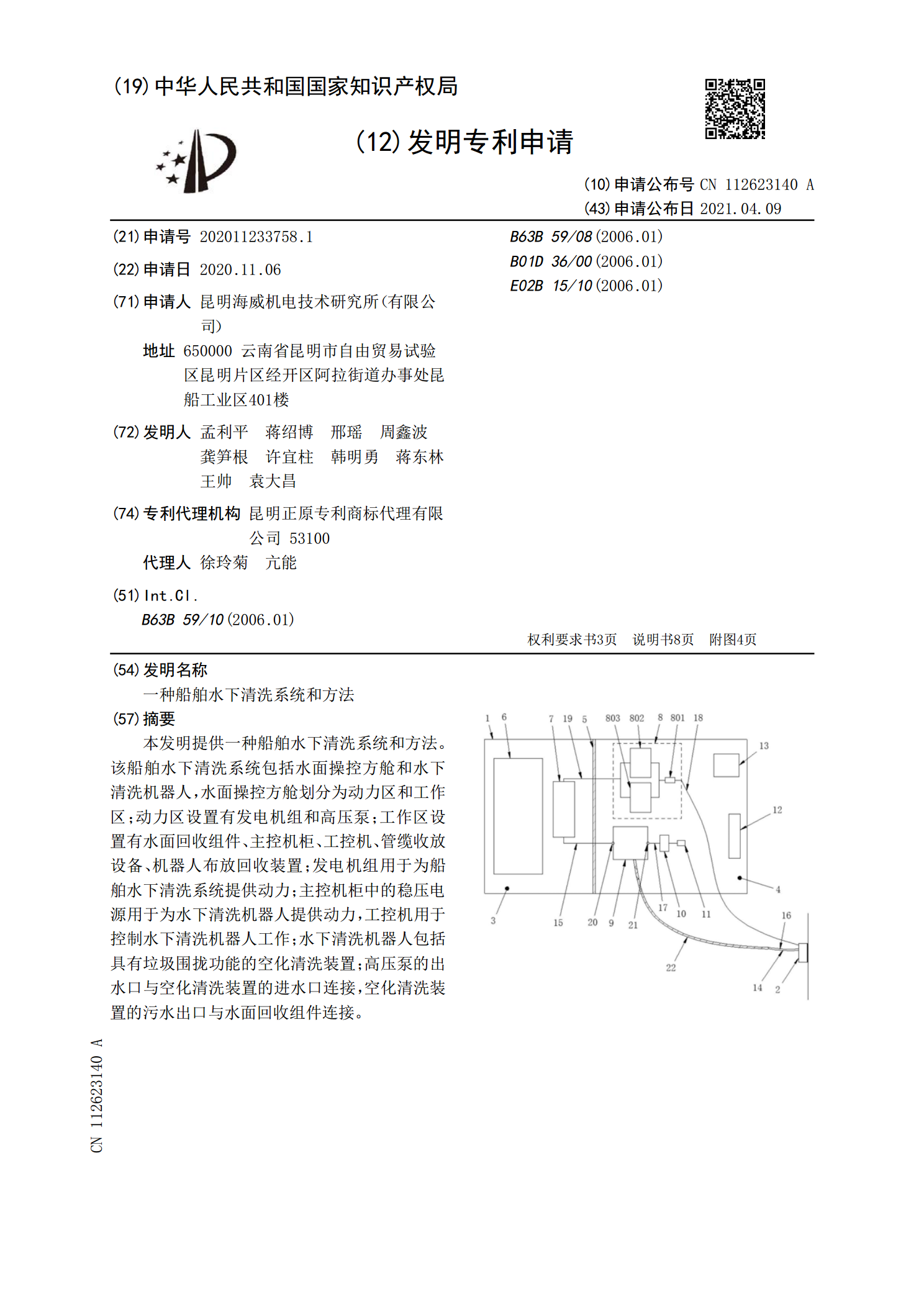
本发明提供一种船舶水下清洗系统和方法。该船舶水下清洗系统包括水面操控方舱和水下清洗机器人,水面操控方舱划分为动力区和工作区;动力区设置有发电机组和高压泵;工作区设置有水面回收组件、主控机柜、工控机、管缆收放设备、机器人布放回收装置;发电机组用于为船舶水下清洗系统提供动力;主控机柜中的稳压电源用于为水下清洗机器人提供动力,工控机用于控制水下清洗机器人工作;水下清洗机器人包括具有垃圾围拢功能的空化清洗装置;高压泵的出水口与空化清洗装置的进水口连接,空化清洗装置的污水出口与水面回收组件连接。

基于北斗定位系统的水下定位方法.pdf
本发明公开了一种基于北斗定位系统的水下定位方法,包括如下操作步骤:S1:长基线定位:将换能器安装在船体上,向位置已知的固定在海底的应答器发出测量信号;S2:短基线定位:将3个以上换能器固定在船体上组成声基阵,由声基阵内的一个换能器向应答器发出测量信号,测量信号经应答器接收后反馈发送至声基阵内所有换能器;S3:超短基线定位:超短基线的所有声单元集中安装在一个收发器中,组成声基阵,通过测定声单元的相位差来确定换能器到目标的方位。本发明可以通过北斗提供实时高精度的空间坐标基准,对于水下跟踪、导航应用,通过浮标北

基于风格迁移的声呐仿真图像生成方法、系统及介质.pdf
本发明公开了一种基于风格迁移的声呐仿真图像生成方法、系统及介质,其中方法包括:根据真实声呐图像中所包含的目标物体类别,以卫星遥感图像为输入,对卫星遥感图像进行识别,识别出与目标物体类别相同的识别物,对识别物所在范围进行标记;对经过识别并标记的卫星遥感图像进行图像分割,以目标物体类别为分类,构建卫星子图像数据集;构建风格迁移网络,以真实的声呐图像作为风格图像,对分割后的卫星子图像进行风格迁移,生成声呐仿真图像,以作为训练样本图像。本发明基于遥感卫星图像,使用风格迁移网络,获得模拟的声呐图像,能够有效扩充声呐