
一种基于声呐图像的目标检测方法.pdf

一条****涛k


1/9

2/9

3/9

4/9

5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于声呐图像的目标检测方法.pdf
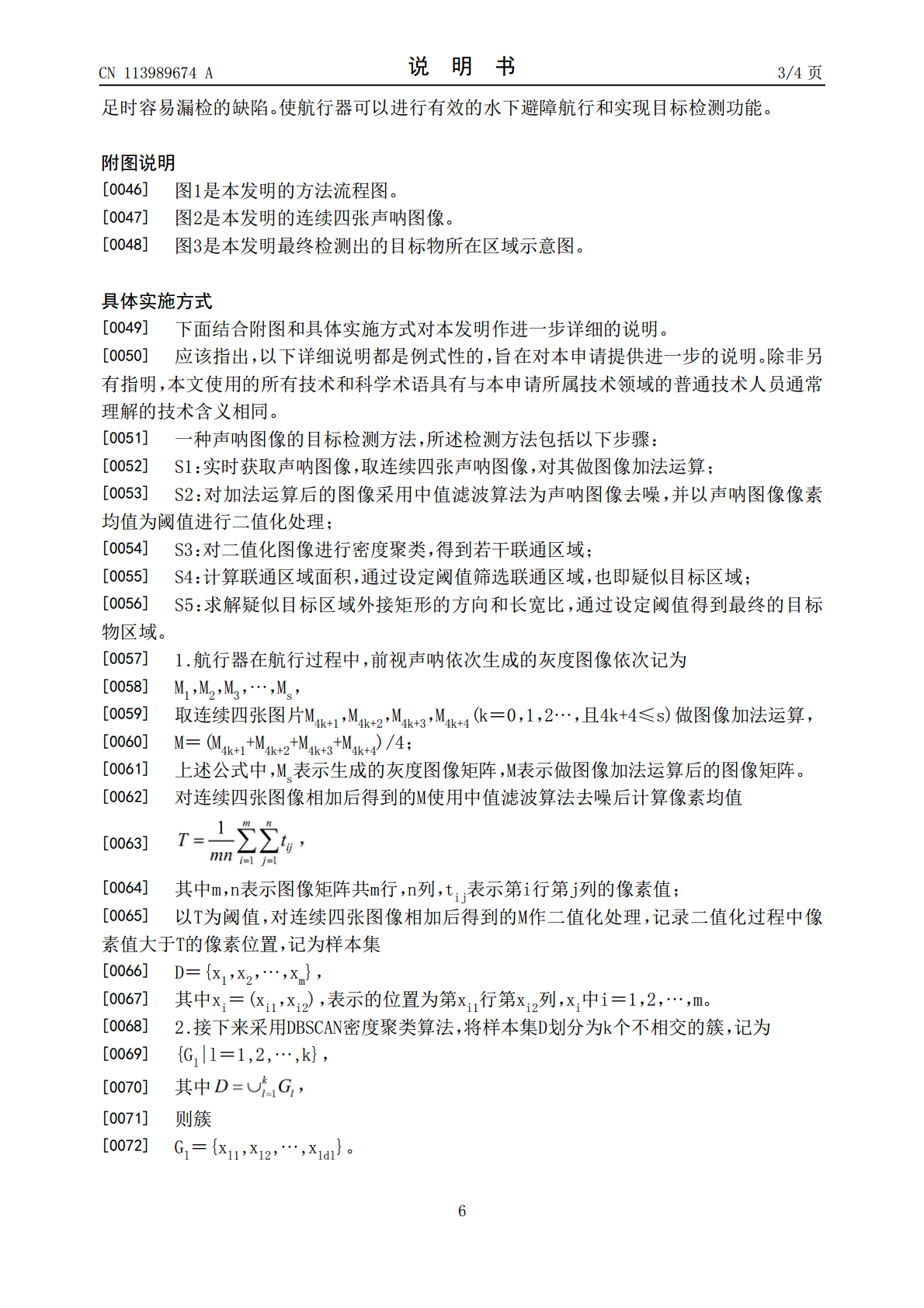
本发明公开了一种基于声呐图像的目标检测方法,所述检测方法包括实时获取声呐图像,取至少连续四张声呐图像,对其做图像加法运算;对加法运算后的图像采用中值滤波算法为声呐图像去噪,并以声呐图像像素均值为阈值进行二值化处理;对二值化图像进行密度聚类,得到若干联通区域;计算联通区域面积,通过设定阈值筛选联通区域,也即疑似目标区域;求解疑似目标区域外接矩形的方向和长宽比,通过设定阈值得到最终的目标物区域。本发明可以引导航行器在水下航行过程中通过声呐图像对周围环境进行感知,适用于水下噪声较多情况下的声呐图像处理,同时解决
基于声呐图像的AI水下目标检测与定位方法.pdf
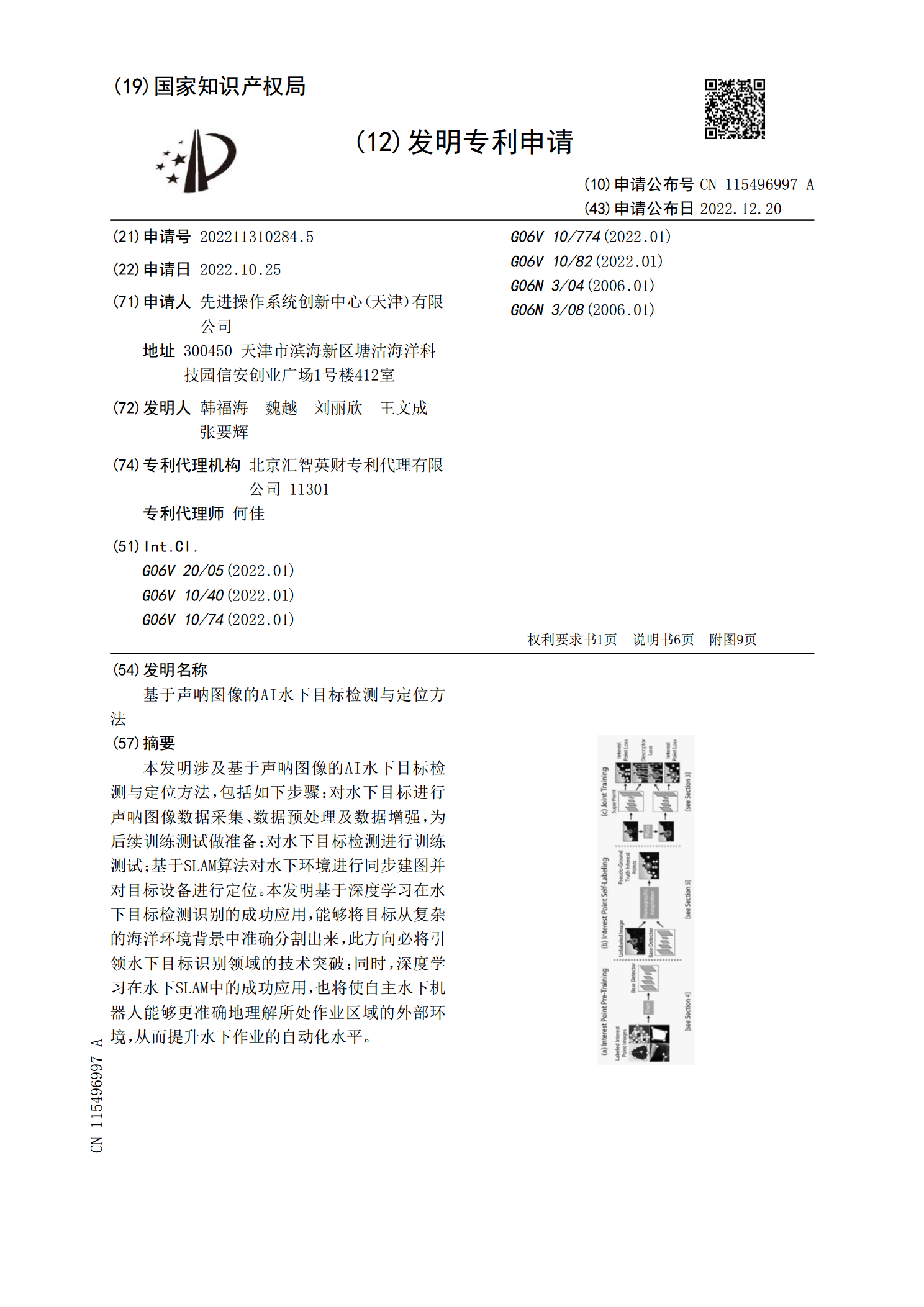
本发明涉及基于声呐图像的AI水下目标检测与定位方法,包括如下步骤:对水下目标进行声呐图像数据采集、数据预处理及数据增强,为后续训练测试做准备;对水下目标检测进行训练测试;基于SLAM算法对水下环境进行同步建图并对目标设备进行定位。本发明基于深度学习在水下目标检测识别的成功应用,能够将目标从复杂的海洋环境背景中准确分割出来,此方向必将引领水下目标识别领域的技术突破;同时,深度学习在水下SLAM中的成功应用,也将使自主水下机器人能够更准确地理解所处作业区域的外部环境,从而提升水下作业的自动化水平。

一种基于YOLOv3的水下声呐图像目标检测方法.pptx
汇报人:目录PARTONEPARTTWOYOLOv3算法原理YOLOv3算法特点YOLOv3算法应用场景PARTTHREE水下环境的特殊性声呐图像的特点目标检测的难点PARTFOUR数据预处理特征提取目标检测结果评估PARTFIVE实验设置实验结果结果分析对比分析PARTSIX研究结论研究不足与展望THANKYOU

基于卷积神经网络的彩色图像声呐目标检测.docx
基于卷积神经网络的彩色图像声呐目标检测随着科技的飞速发展,声呐技术逐渐成为海洋、地质和医疗领域中最重要的一种检测手段。声呐通过声波在物体表面反弹所产生的回波信号,来探测物体和水下的情况。在众多声呐应用中,声呐目标检测是其中最为重要的一个方面。本文将介绍基于卷积神经网络的彩色图像声呐目标检测。一、声呐目标检测的背景声呐目标检测的目的是在海洋、地质和医疗场景中,对目标进行检测和识别。虽然传统的声呐检测方法可以实现这个目的,但是它们需要大量的人工干预和数据加工,甚至需要专业的知识和经验。而基于卷积神经网络的彩色

基于声呐图像的水下目标检测、识别与跟踪研究综述.docx
基于声呐图像的水下目标检测、识别与跟踪研究综述基于声呐图像的水下目标检测、识别与跟踪研究综述摘要:随着水下资源的开发和海洋科学的发展,水下目标检测、识别与跟踪成为了一个重要的研究领域。声呐图像作为一种常用的水下探测手段,具有图像信息充分、穿透力强等特点,在水下目标检测、识别与跟踪研究中具有重要的应用价值。本文综述了基于声呐图像的水下目标检测、识别与跟踪的研究进展,主要从目标检测算法、目标识别算法和目标跟踪算法三个方面进行了分析和总结,并提出了一些待解决的问题和未来的研究方向。关键词:声呐图像;水下目标检测