
一种基于侧扫声呐的大坝水下裂缝检测方法.pdf

一只****ua


1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于侧扫声呐的大坝水下裂缝检测方法.pdf
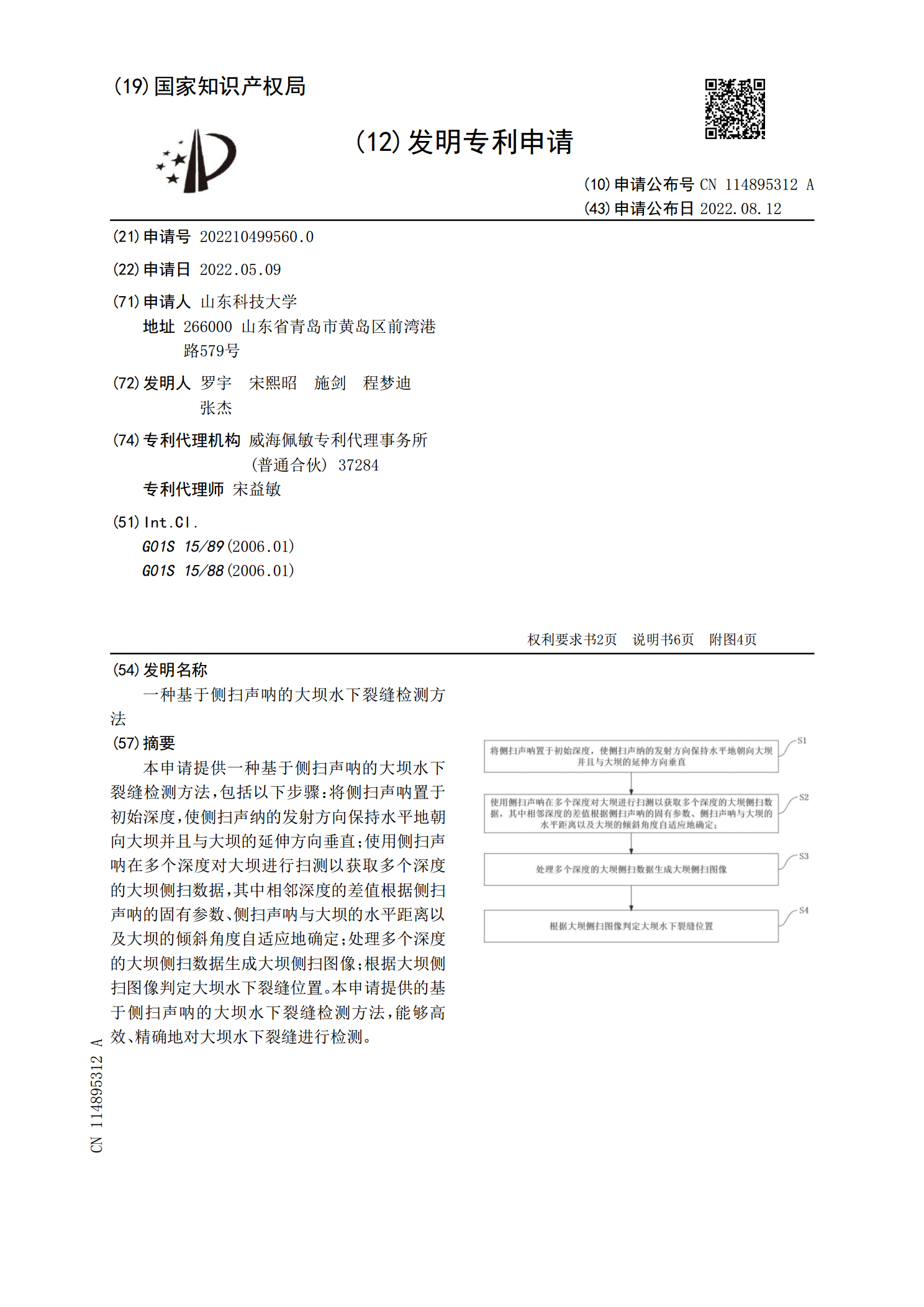
本申请提供一种基于侧扫声呐的大坝水下裂缝检测方法,包括以下步骤:将侧扫声呐置于初始深度,使侧扫声纳的发射方向保持水平地朝向大坝并且与大坝的延伸方向垂直;使用侧扫声呐在多个深度对大坝进行扫测以获取多个深度的大坝侧扫数据,其中相邻深度的差值根据侧扫声呐的固有参数、侧扫声呐与大坝的水平距离以及大坝的倾斜角度自适应地确定;处理多个深度的大坝侧扫数据生成大坝侧扫图像;根据大坝侧扫图像判定大坝水下裂缝位置。本申请提供的基于侧扫声呐的大坝水下裂缝检测方法,能够高效、精确地对大坝水下裂缝进行检测。
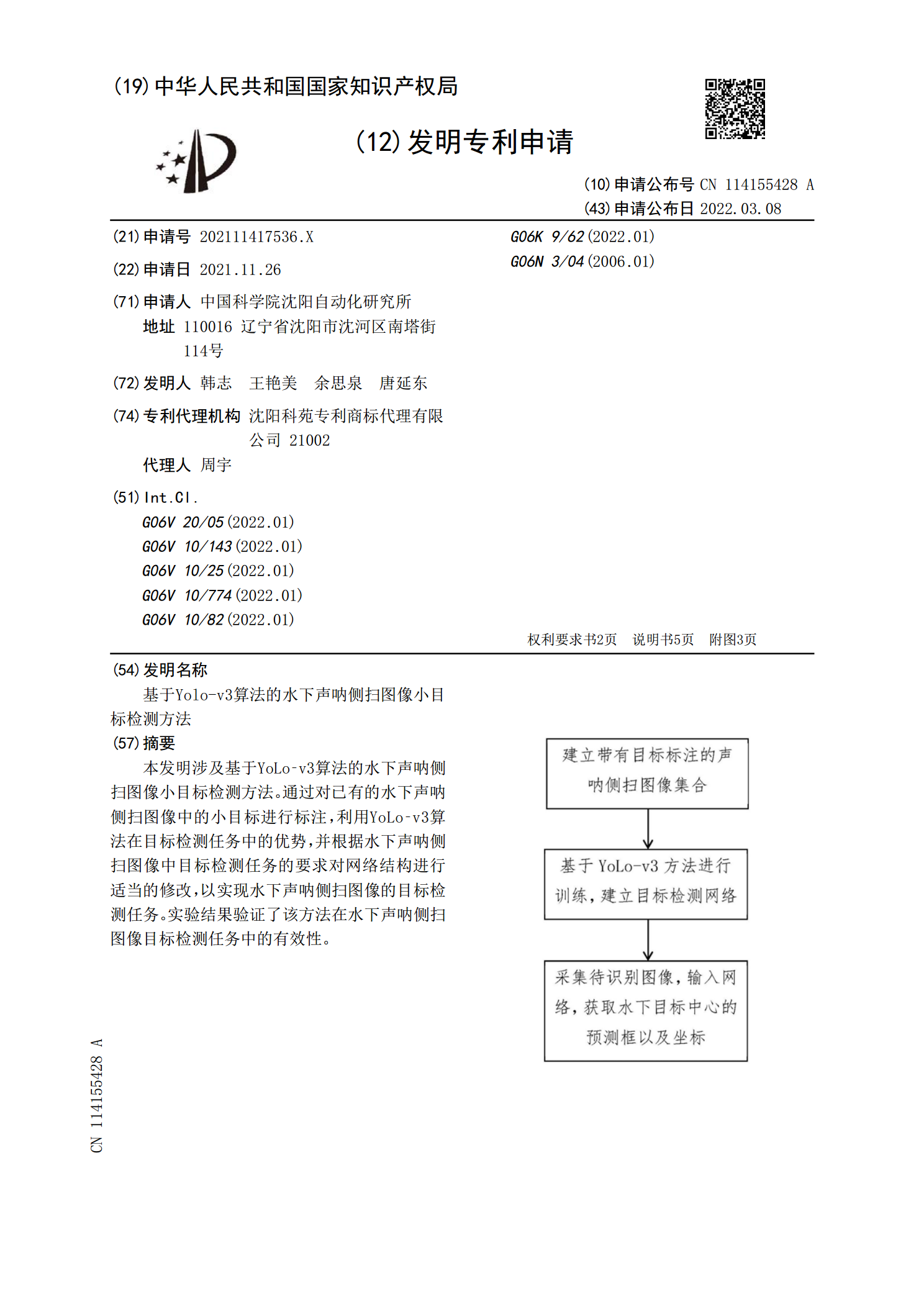
基于Yolo-v3算法的水下声呐侧扫图像小目标检测方法.pdf
本发明涉及基于YoLo‑v3算法的水下声呐侧扫图像小目标检测方法。通过对已有的水下声呐侧扫图像中的小目标进行标注,利用YoLo‑v3算法在目标检测任务中的优势,并根据水下声呐侧扫图像中目标检测任务的要求对网络结构进行适当的修改,以实现水下声呐侧扫图像的目标检测任务。实验结果验证了该方法在水下声呐侧扫图像目标检测任务中的有效性。
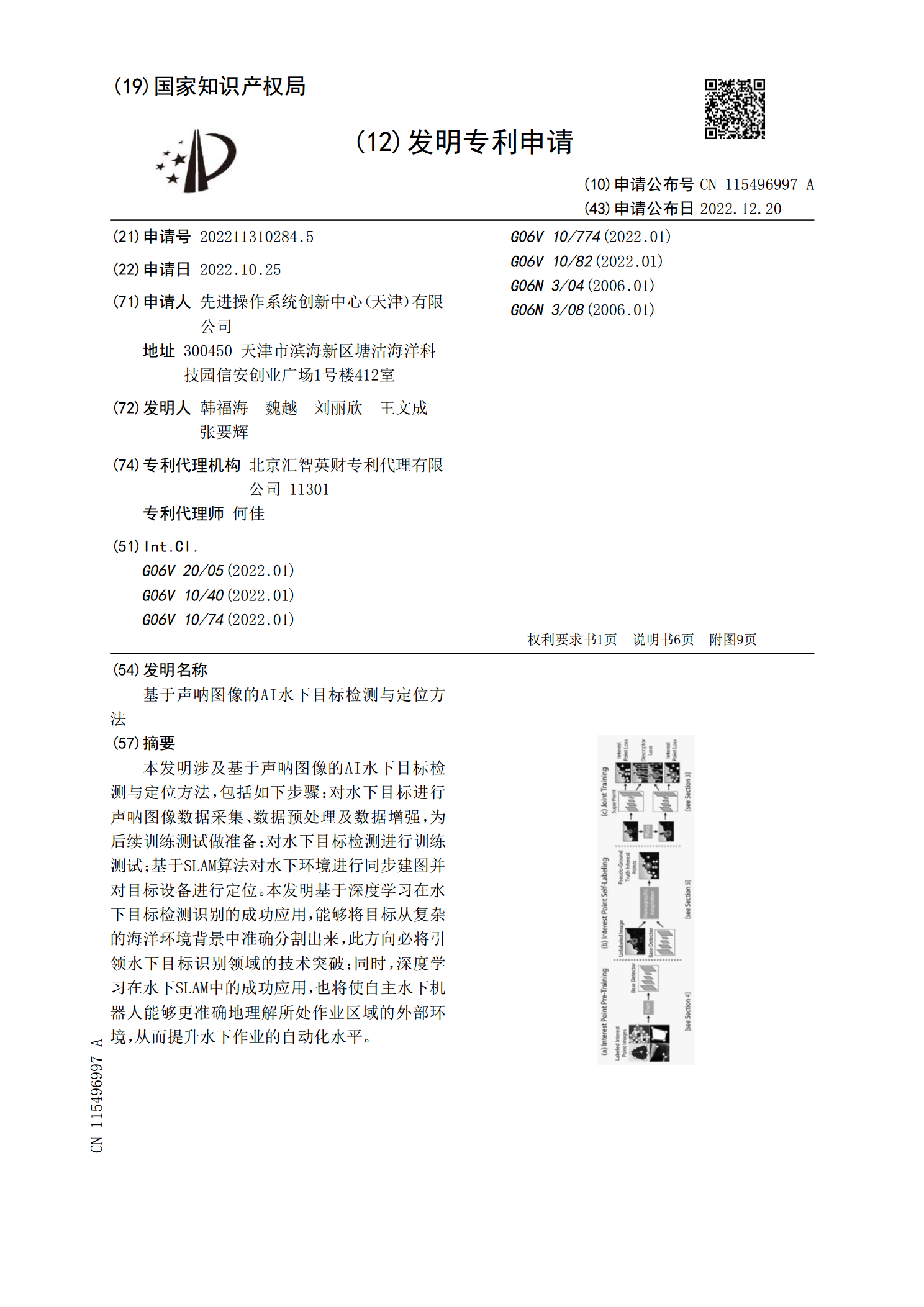
基于声呐图像的AI水下目标检测与定位方法.pdf
本发明涉及基于声呐图像的AI水下目标检测与定位方法,包括如下步骤:对水下目标进行声呐图像数据采集、数据预处理及数据增强,为后续训练测试做准备;对水下目标检测进行训练测试;基于SLAM算法对水下环境进行同步建图并对目标设备进行定位。本发明基于深度学习在水下目标检测识别的成功应用,能够将目标从复杂的海洋环境背景中准确分割出来,此方向必将引领水下目标识别领域的技术突破;同时,深度学习在水下SLAM中的成功应用,也将使自主水下机器人能够更准确地理解所处作业区域的外部环境,从而提升水下作业的自动化水平。

一种水下大坝表面裂缝识别方法.pdf
本发明提出一种水下大坝表面裂缝识别方法,利用PGGAN模型生成更多的水下大坝表面图像来构造训练数据;将训练数据输入到CNN特征提取器中获取特征,构建训练模型并计算图像组中两图像对的特征空间距离;根据特征空间距离判断图像对是否属于同一类别,将判断结果与预设的特征空间距离相对比,若不属于同一类别,则计算二者之间的损失;将损失回传至训练模型中,并调整训练模型的参数,直至训练模型准确度达到预设值,最后输入需要识别的图像至训练模型中,获得图像是否存在裂缝的判断结果,本申请通过傅里叶变换后的图像可以消除大坝表面杂物的

一种成像声呐检测水下平面形桥墩裂缝的测点布设方法.pdf
本发明涉及一种成像声呐检测水下平面形桥墩裂缝的测点布设方法。用于部署多个测点对桥墩平面裂缝进行完整检测。其中,检测桥墩对象为平面形桥墩;测点布设方法是基于声呐中心轴向正对桥墩平面的检测测位进行测点布设。所述测点布设方法中,当声呐和桥墩平面沿桥墩平面法向的距离保持不变时,能通过横向移动和竖向移动声呐布设多个测点,且保证相邻测点的波束范围相互覆盖以补偿各测点下无法检测到的盲区范围,从而实现对桥墩平面裂缝的完整检测。本发明能在完整检测平面桥墩裂缝的同时使得测点布设数量少,提高检测效率。