
一种双夹持机械手爪.pdf

雨巷****轶丽

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种双夹持机械手爪.pdf
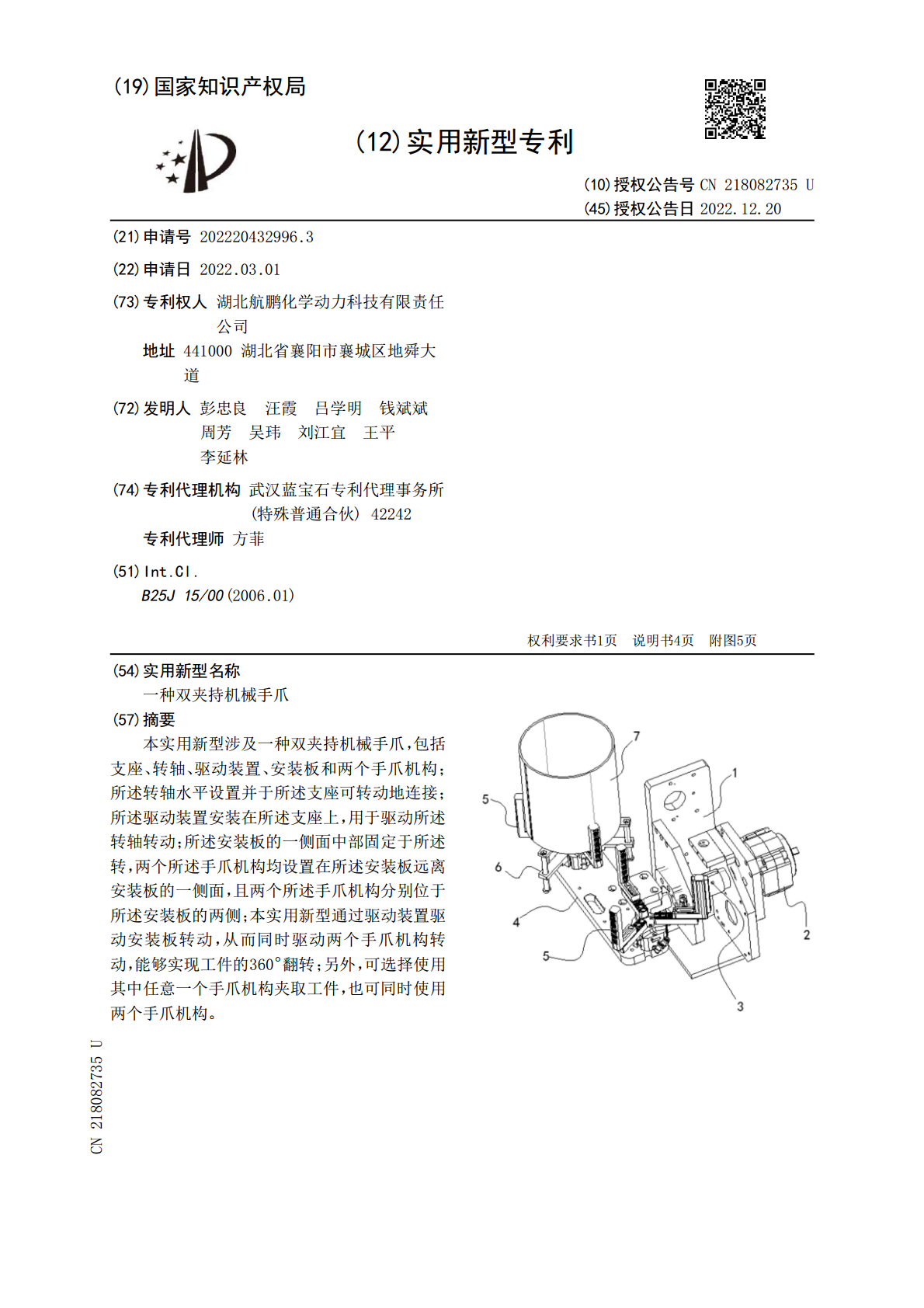
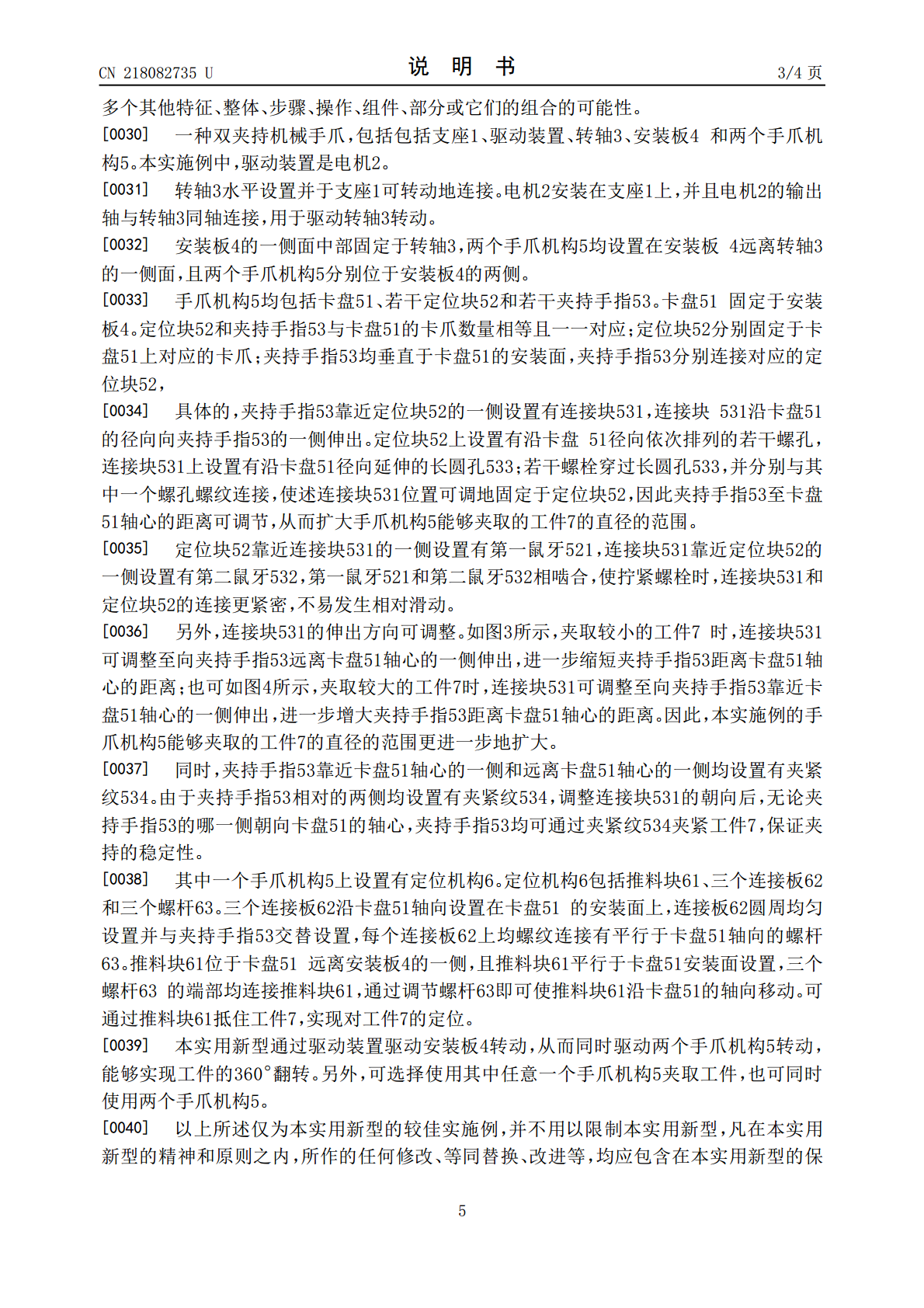
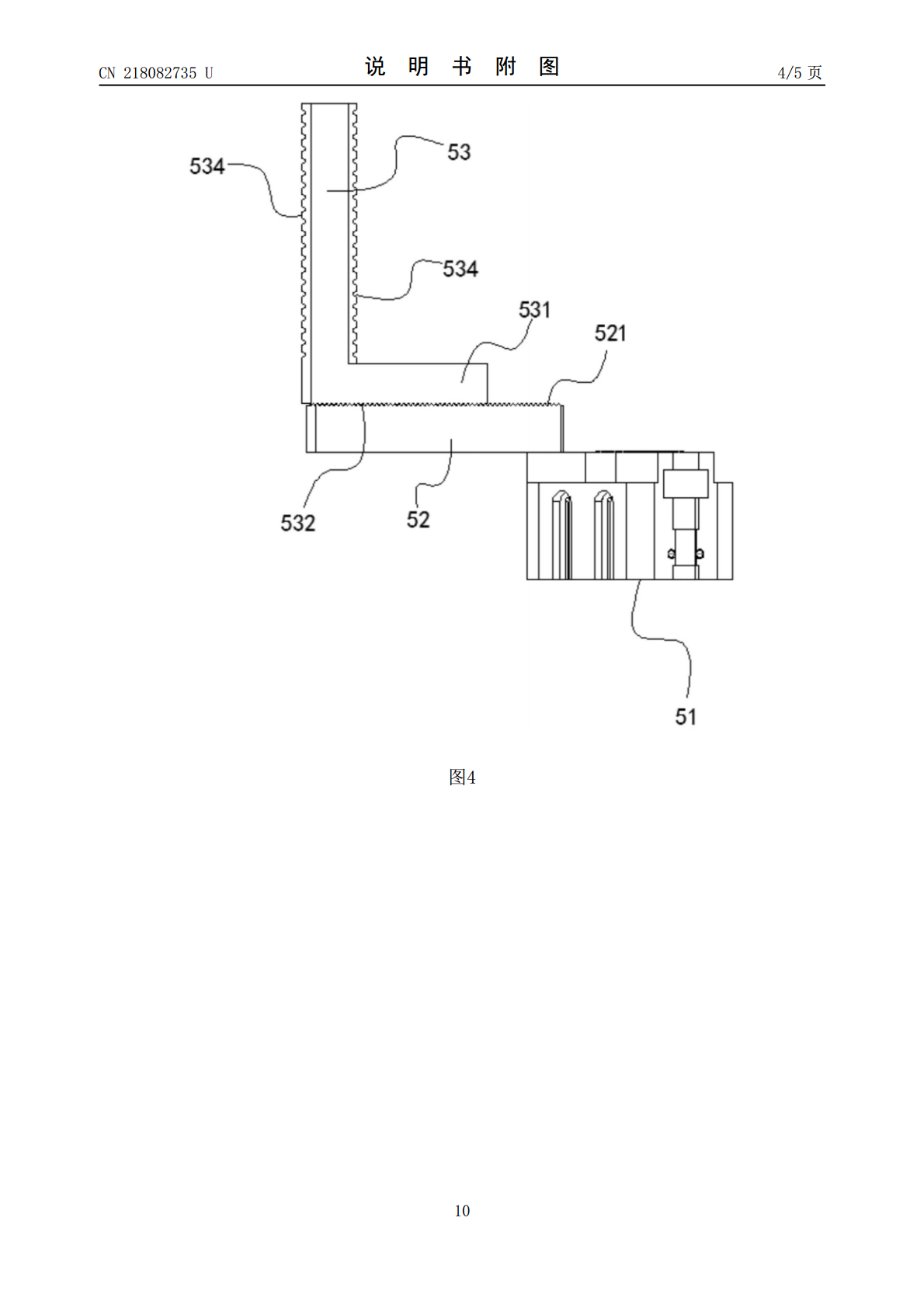
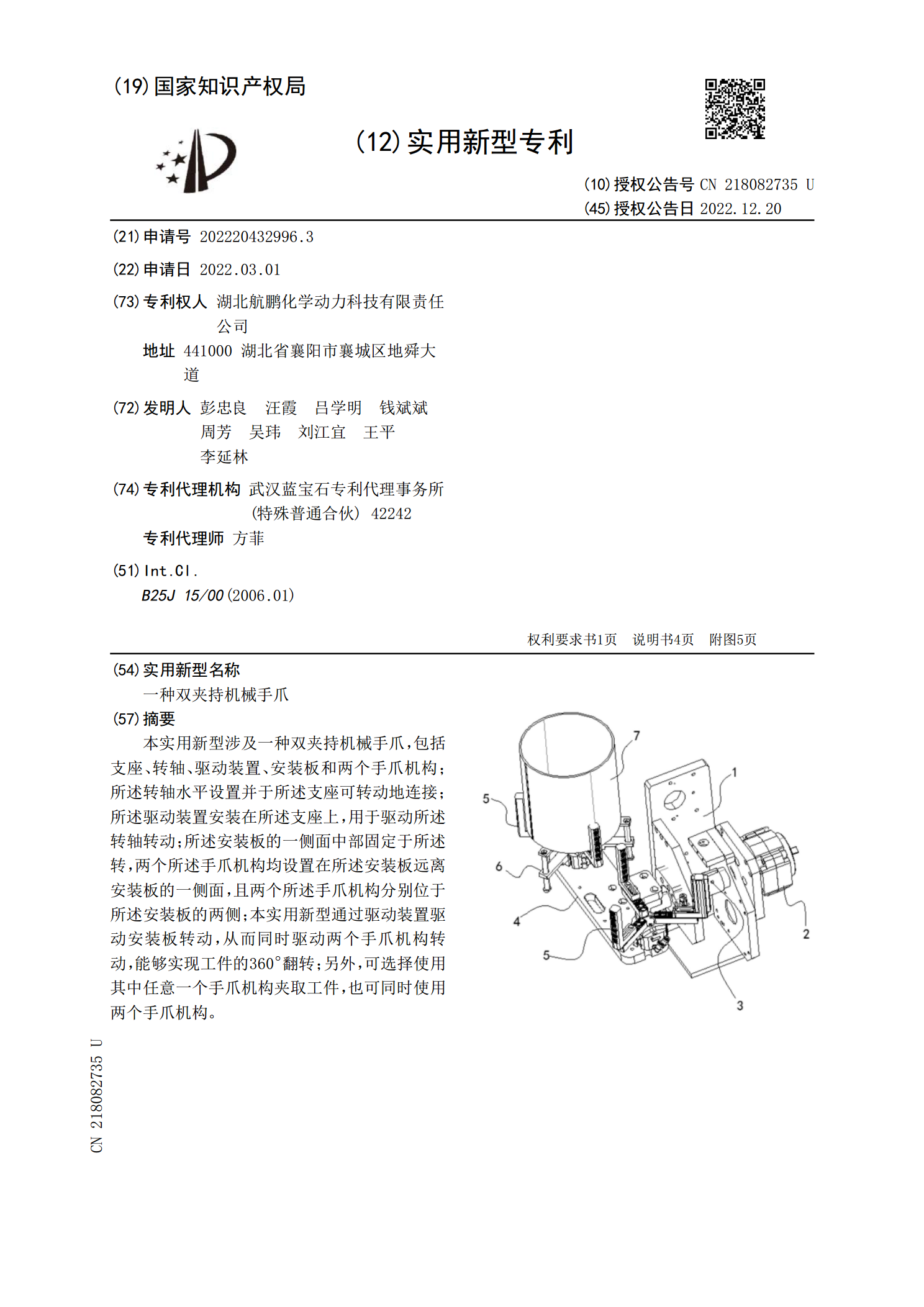
本实用新型涉及一种双夹持机械手爪,包括支座、转轴、驱动装置、安装板和两个手爪机构;所述转轴水平设置并于所述支座可转动地连接;所述驱动装置安装在所述支座上,用于驱动所述转轴转动;所述安装板的一侧面中部固定于所述转,两个所述手爪机构均设置在所述安装板远离安装板的一侧面,且两个所述手爪机构分别位于所述安装板的两侧;本实用新型通过驱动装置驱动安装板转动,从而同时驱动两个手爪机构转动,能够实现工件的360°翻转;另外,可选择使用其中任意一个手爪机构夹取工件,也可同时使用两个手爪机构。
一种气动夹持机械手爪.pdf
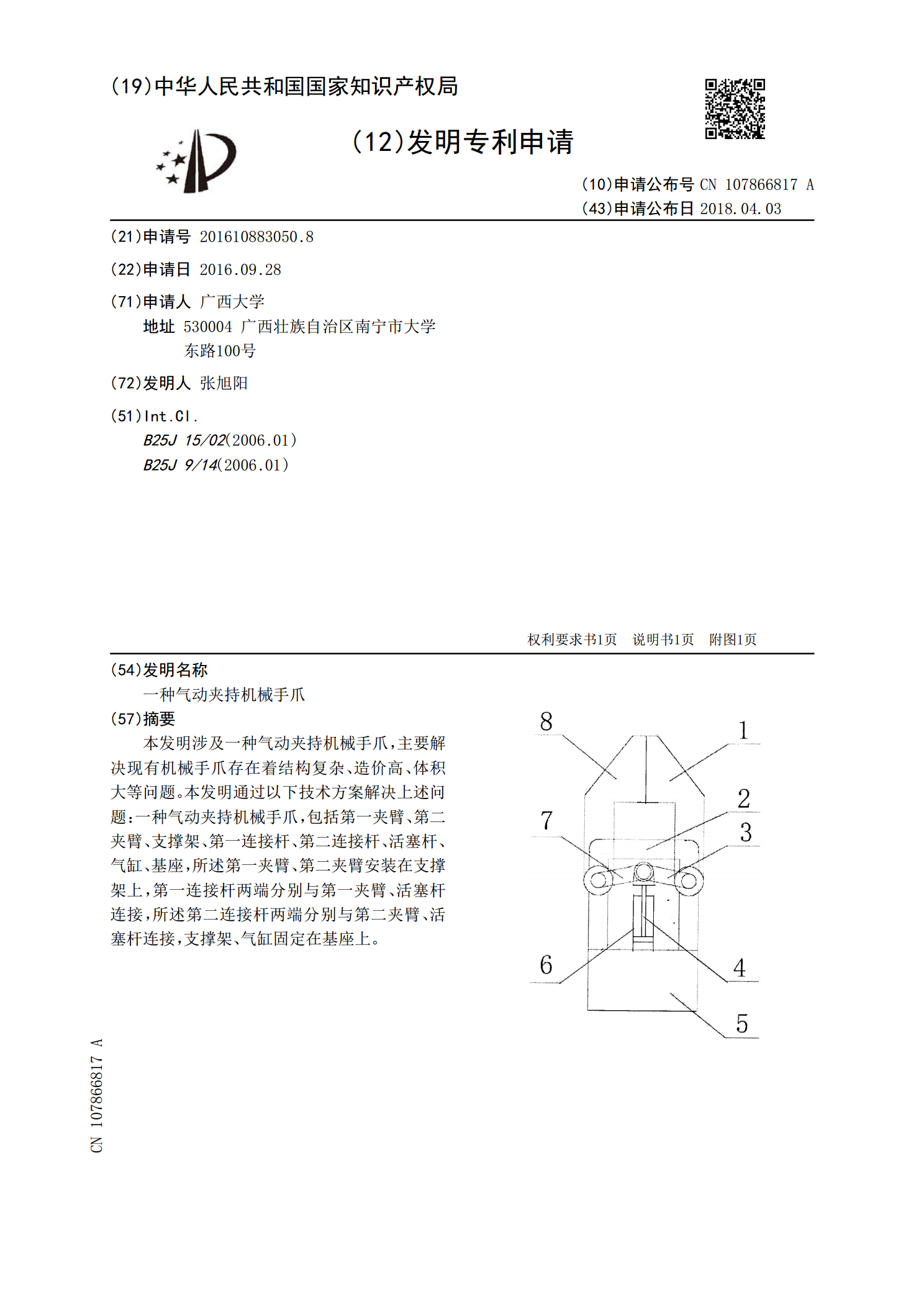
本发明涉及一种气动夹持机械手爪,主要解决现有机械手爪存在着结构复杂、造价高、体积大等问题。本发明通过以下技术方案解决上述问题:一种气动夹持机械手爪,包括第一夹臂、第二夹臂、支撑架、第一连接杆、第二连接杆、活塞杆、气缸、基座,所述第一夹臂、第二夹臂安装在支撑架上,第一连接杆两端分别与第一夹臂、活塞杆连接,所述第二连接杆两端分别与第二夹臂、活塞杆连接,支撑架、气缸固定在基座上。

一种用于夹持物料的手爪及抓手.pdf
本发明属于生产线机器人领域,具体为一种夹持物料的手爪,包括手爪主体、连接轴和第一弹性牵引件,手爪主体可转动地连接于连接轴,第一弹性牵引件连接连接轴和手爪主体;手爪主体包括连接座、至少两个爪臂和至少两个手指组件,每个爪臂安装在连接座上,每个爪臂具有预设范围内的被动自由度,每个手指组件安装在对应一个爪臂上,手指组件包括固定部和抓取部,该手爪可抓取表面为曲面的物件,其自适应能力高,与物件的贴合程度高,抓取稳固;本发明还提供一种应用上述手爪的抓手,包括机座、两个手爪和负压源,该抓手自适应能力强,抓取稳固。
一种双位置抓取的手爪.pdf
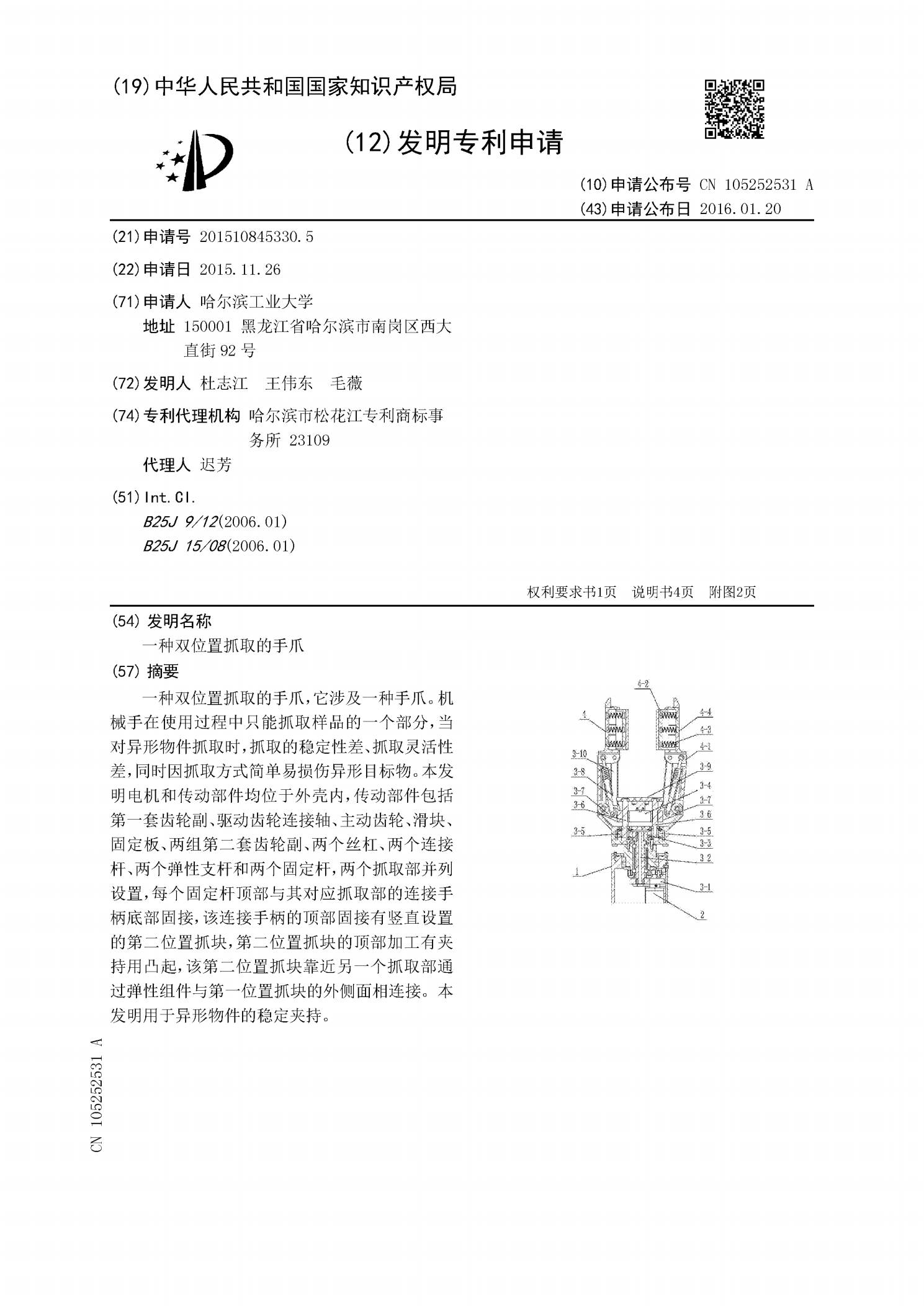
一种双位置抓取的手爪,它涉及一种手爪。机械手在使用过程中只能抓取样品的一个部分,当对异形物件抓取时,抓取的稳定性差、抓取灵活性差,同时因抓取方式简单易损伤异形目标物。本发明电机和传动部件均位于外壳内,传动部件包括第一套齿轮副、驱动齿轮连接轴、主动齿轮、滑块、固定板、两组第二套齿轮副、两个丝杠、两个连接杆、两个弹性支杆和两个固定杆,两个抓取部并列设置,每个固定杆顶部与其对应抓取部的连接手柄底部固接,该连接手柄的顶部固接有竖直设置的第二位置抓块,第二位置抓块的顶部加工有夹持用凸起,该第二位置抓块靠近另一个抓取
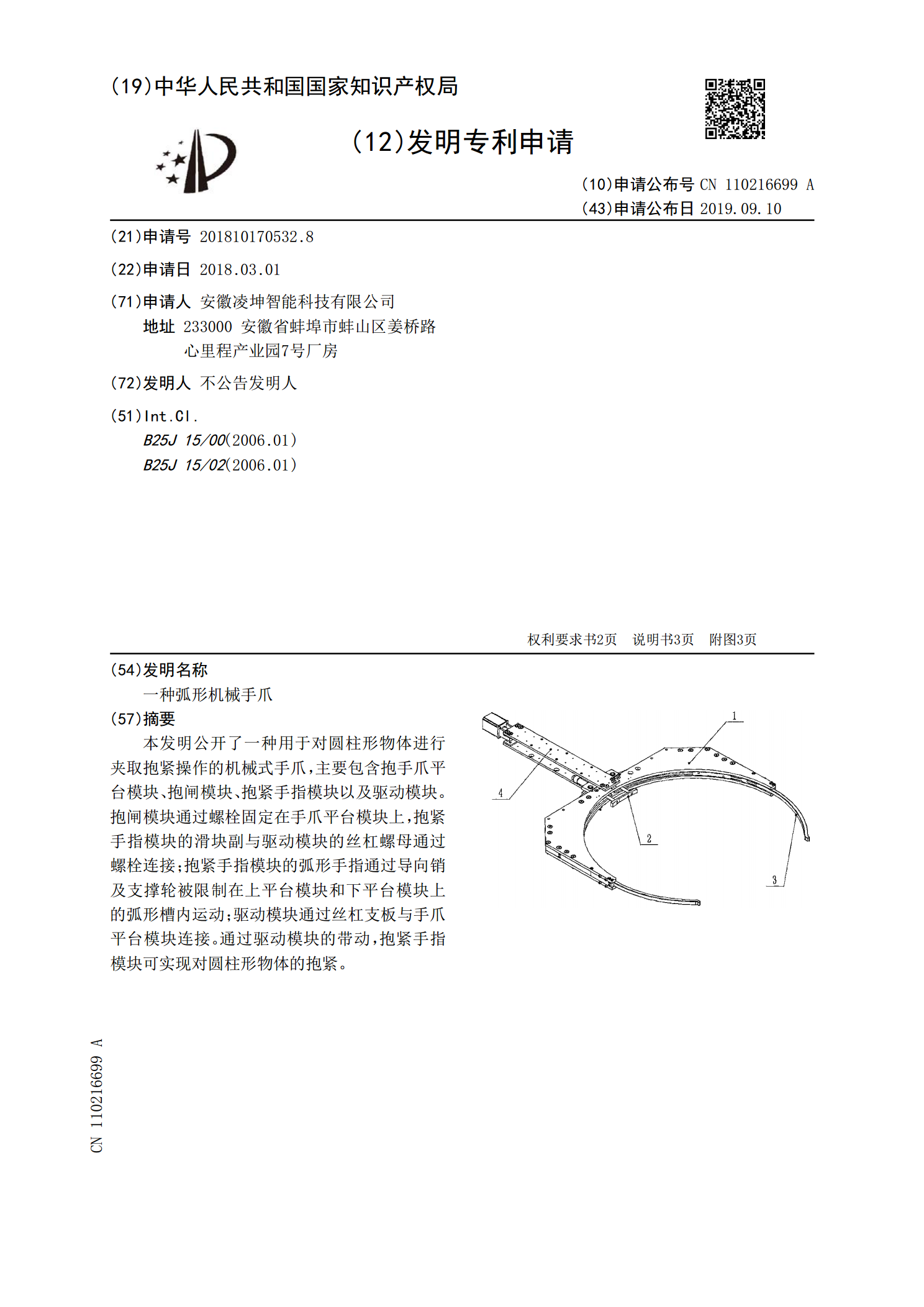
一种弧形机械手爪.pdf
本发明公开了一种用于对圆柱形物体进行夹取抱紧操作的机械式手爪,主要包含抱手爪平台模块、抱闸模块、抱紧手指模块以及驱动模块。抱闸模块通过螺栓固定在手爪平台模块上,抱紧手指模块的滑块副与驱动模块的丝杠螺母通过螺栓连接;抱紧手指模块的弧形手指通过导向销及支撑轮被限制在上平台模块和下平台模块上的弧形槽内运动;驱动模块通过丝杠支板与手爪平台模块连接。通过驱动模块的带动,抱紧手指模块可实现对圆柱形物体的抱紧。