
一种气动夹持机械手爪.pdf

甲申****66

1/4

2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种气动夹持机械手爪.pdf
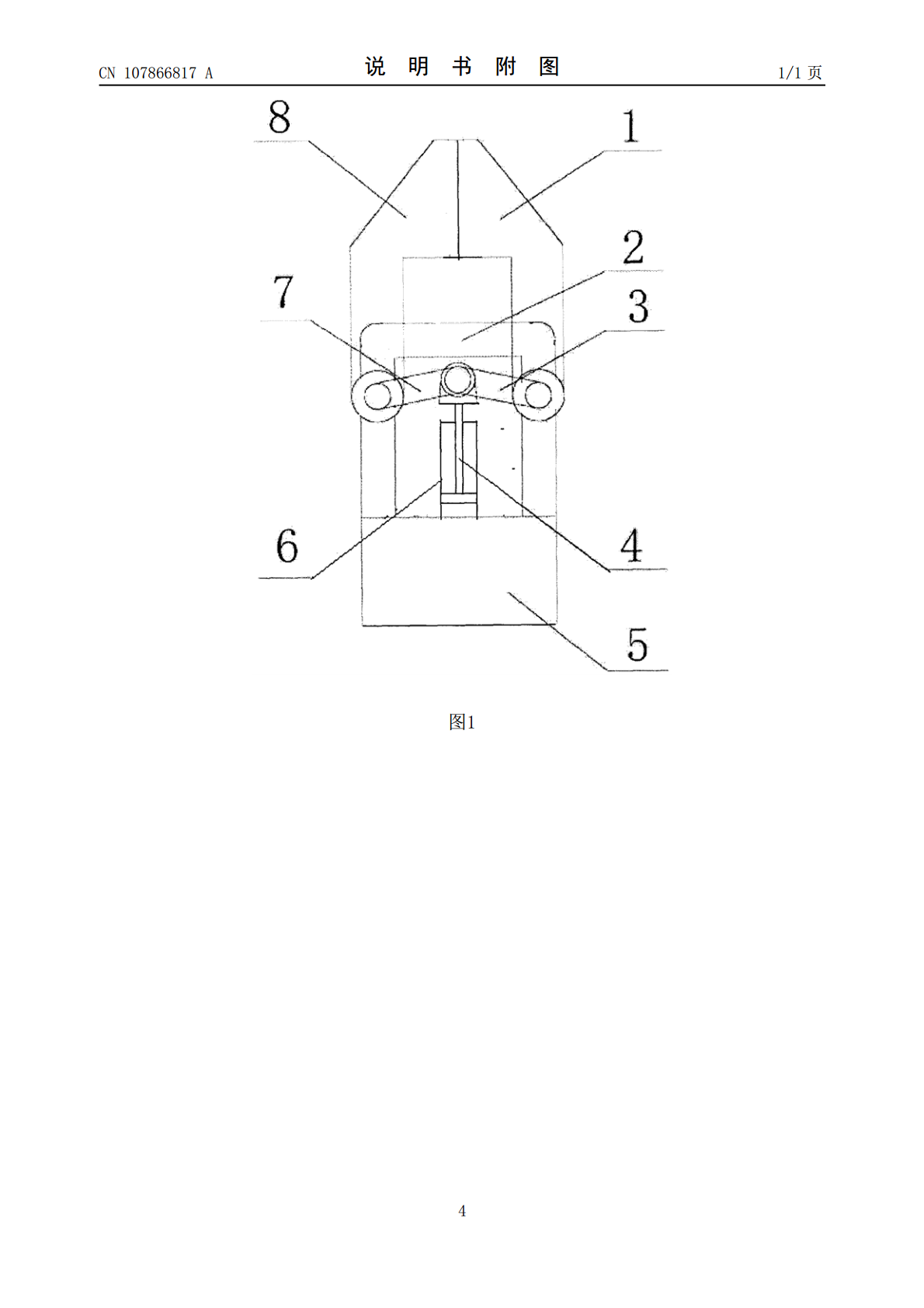
本发明涉及一种气动夹持机械手爪,主要解决现有机械手爪存在着结构复杂、造价高、体积大等问题。本发明通过以下技术方案解决上述问题:一种气动夹持机械手爪,包括第一夹臂、第二夹臂、支撑架、第一连接杆、第二连接杆、活塞杆、气缸、基座,所述第一夹臂、第二夹臂安装在支撑架上,第一连接杆两端分别与第一夹臂、活塞杆连接,所述第二连接杆两端分别与第二夹臂、活塞杆连接,支撑架、气缸固定在基座上。
一种双夹持机械手爪.pdf
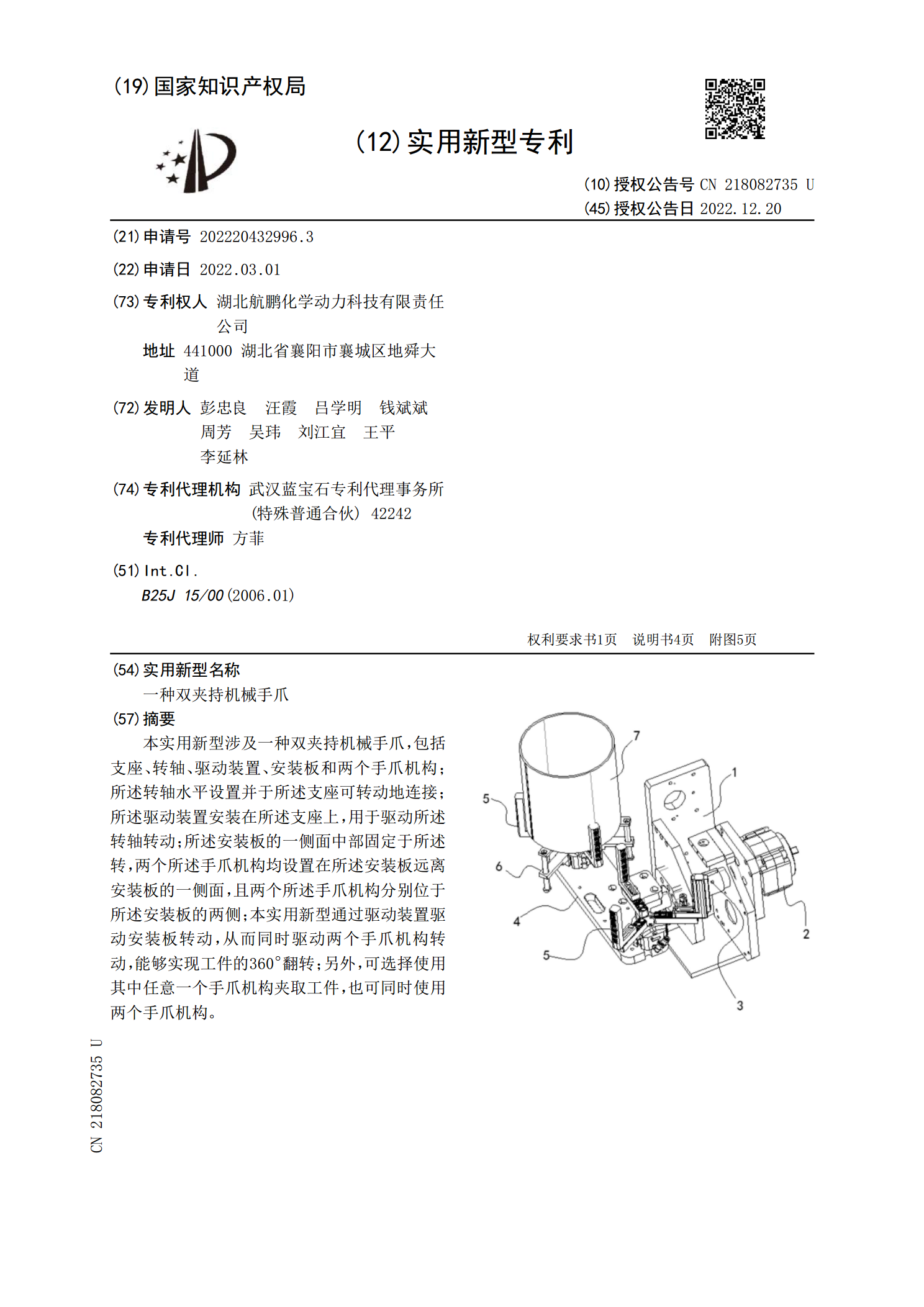
本实用新型涉及一种双夹持机械手爪,包括支座、转轴、驱动装置、安装板和两个手爪机构;所述转轴水平设置并于所述支座可转动地连接;所述驱动装置安装在所述支座上,用于驱动所述转轴转动;所述安装板的一侧面中部固定于所述转,两个所述手爪机构均设置在所述安装板远离安装板的一侧面,且两个所述手爪机构分别位于所述安装板的两侧;本实用新型通过驱动装置驱动安装板转动,从而同时驱动两个手爪机构转动,能够实现工件的360°翻转;另外,可选择使用其中任意一个手爪机构夹取工件,也可同时使用两个手爪机构。
一种气动机械手爪.pdf
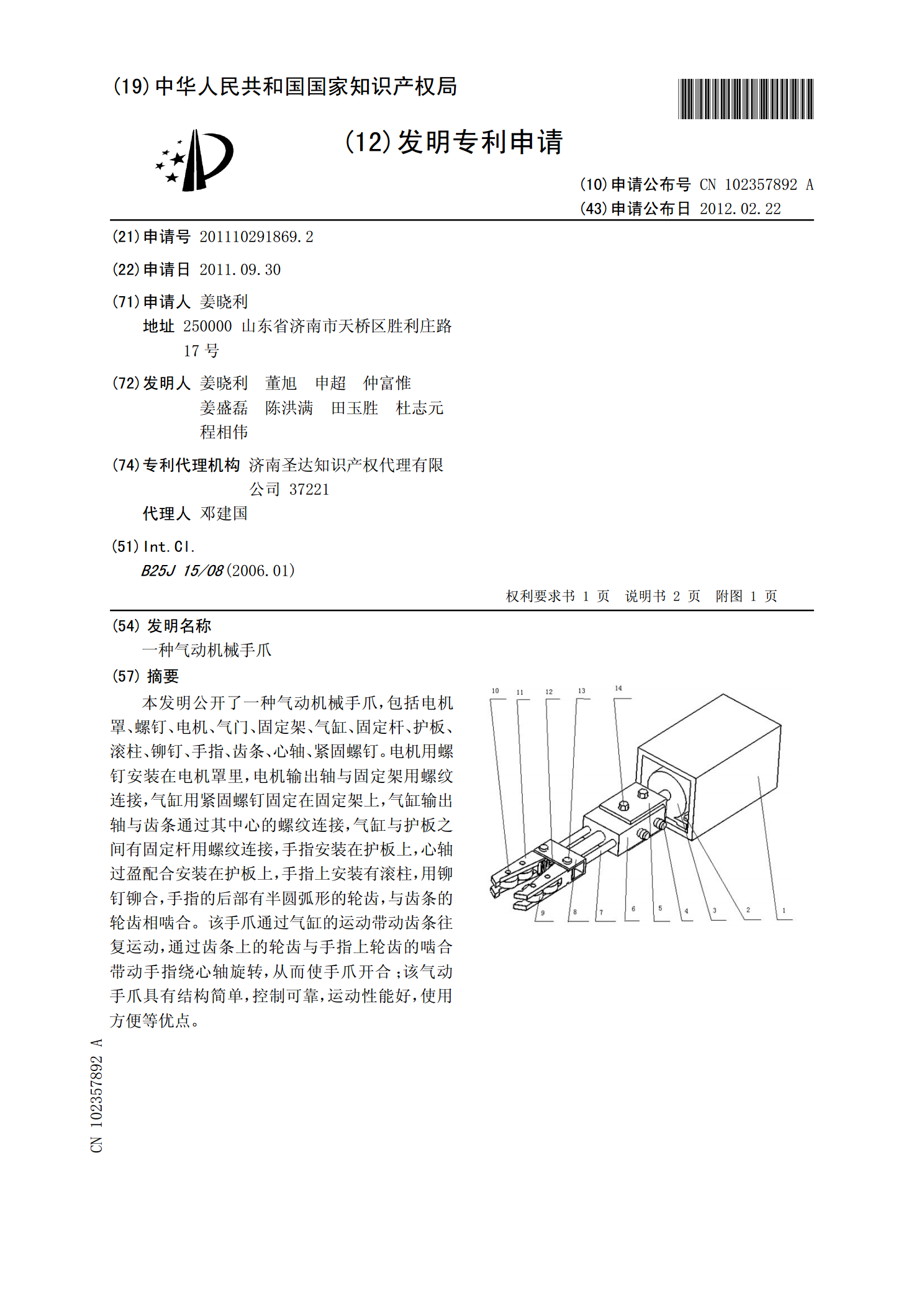
本发明公开了一种气动机械手爪,包括电机罩、螺钉、电机、气门、固定架、气缸、固定杆、护板、滚柱、铆钉、手指、齿条、心轴、紧固螺钉。电机用螺钉安装在电机罩里,电机输出轴与固定架用螺纹连接,气缸用紧固螺钉固定在固定架上,气缸输出轴与齿条通过其中心的螺纹连接,气缸与护板之间有固定杆用螺纹连接,手指安装在护板上,心轴过盈配合安装在护板上,手指上安装有滚柱,用铆钉铆合,手指的后部有半圆弧形的轮齿,与齿条的轮齿相啮合。该手爪通过气缸的运动带动齿条往复运动,通过齿条上的轮齿与手指上轮齿的啮合带动手指绕心轴旋转,从而使手爪
一种新型气动机械手爪.pdf
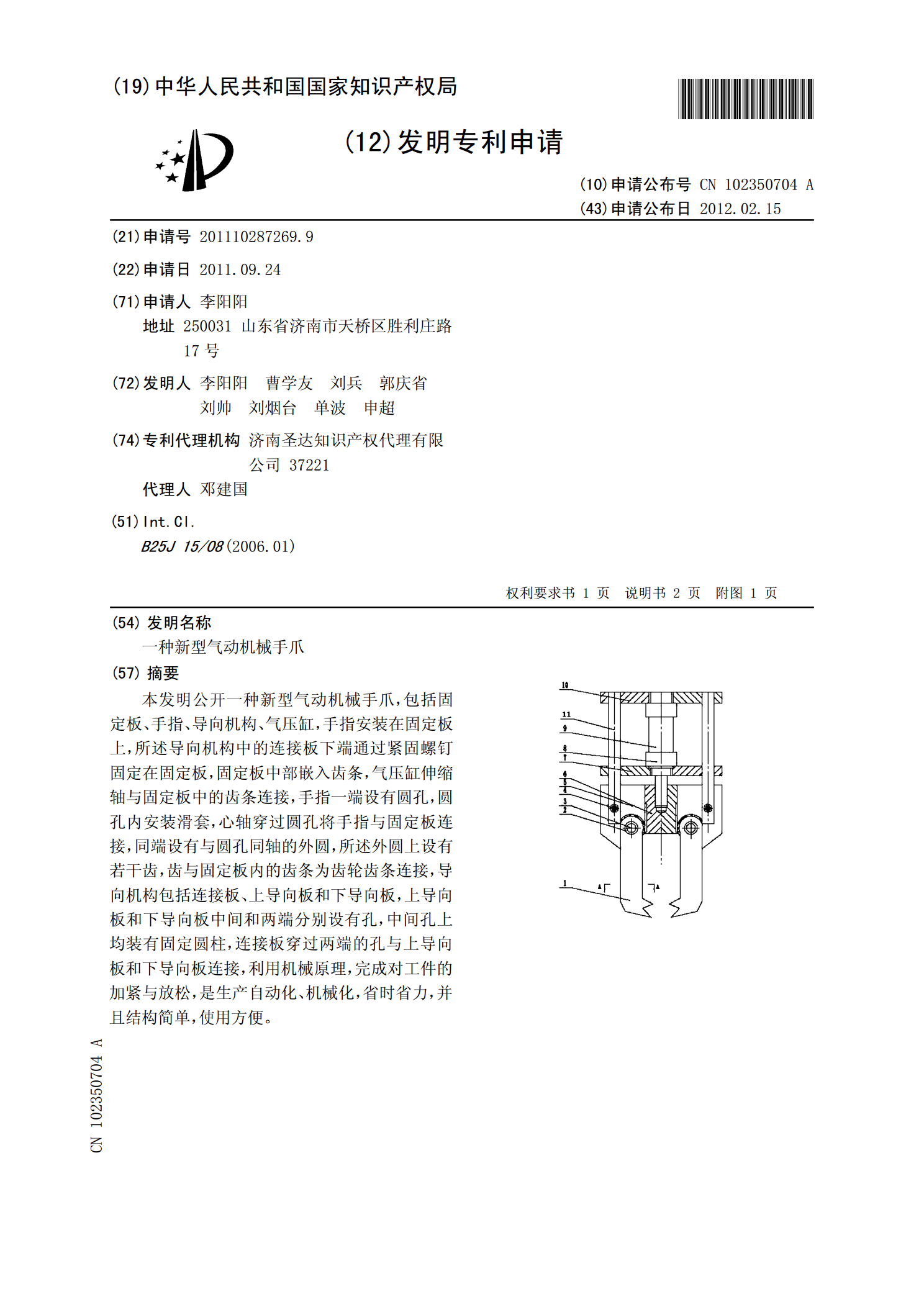
本发明公开一种新型气动机械手爪,包括固定板、手指、导向机构、气压缸,手指安装在固定板上,所述导向机构中的连接板下端通过紧固螺钉固定在固定板,固定板中部嵌入齿条,气压缸伸缩轴与固定板中的齿条连接,手指一端设有圆孔,圆孔内安装滑套,心轴穿过圆孔将手指与固定板连接,同端设有与圆孔同轴的外圆,所述外圆上设有若干齿,齿与固定板内的齿条为齿轮齿条连接,导向机构包括连接板、上导向板和下导向板,上导向板和下导向板中间和两端分别设有孔,中间孔上均装有固定圆柱,连接板穿过两端的孔与上导向板和下导向板连接,利用机械原理,完成对
一种气动夹持机械手.pdf
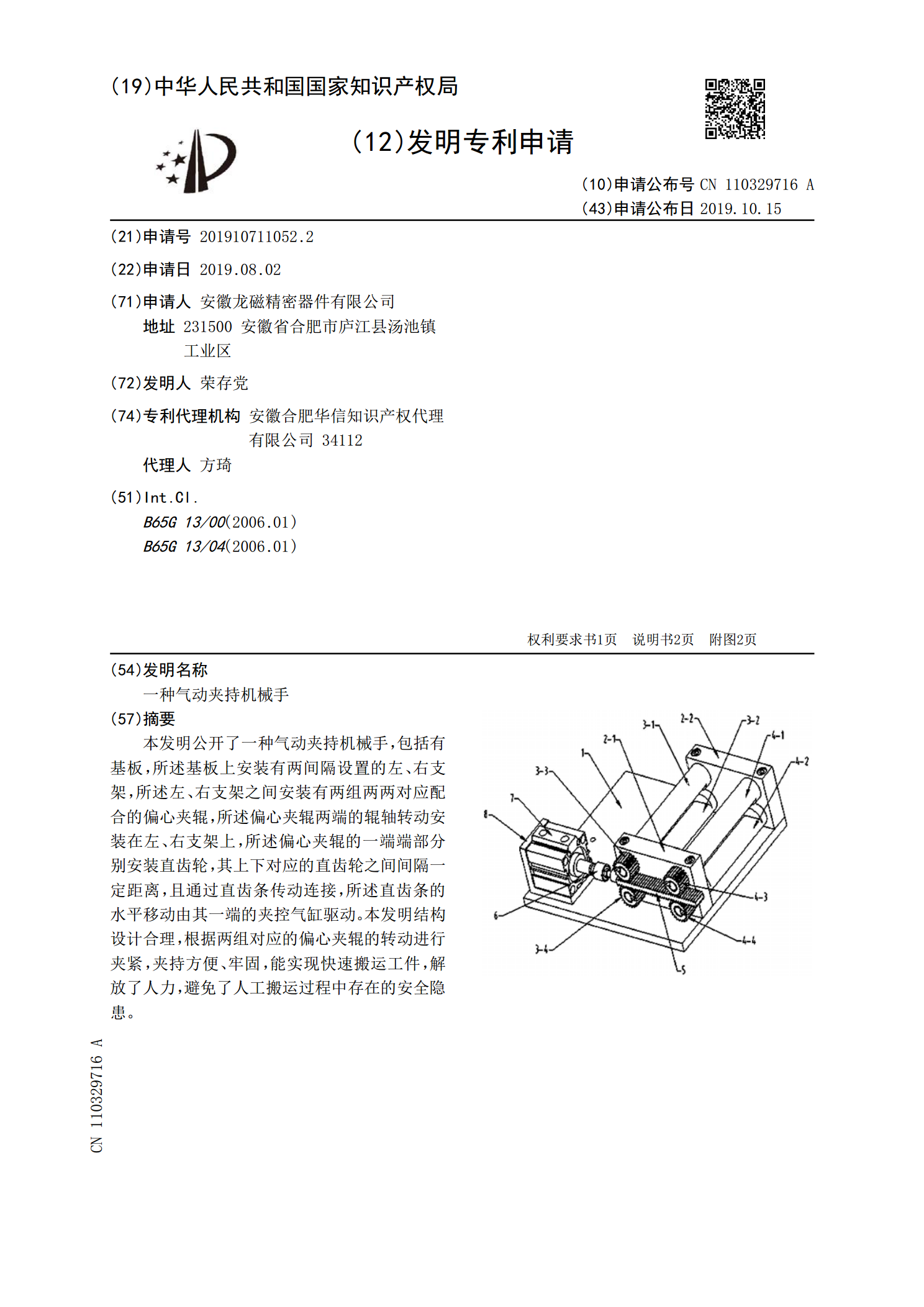
本发明公开了一种气动夹持机械手,包括有基板,所述基板上安装有两间隔设置的左、右支架,所述左、右支架之间安装有两组两两对应配合的偏心夹辊,所述偏心夹辊两端的辊轴转动安装在左、右支架上,所述偏心夹辊的一端端部分别安装直齿轮,其上下对应的直齿轮之间间隔一定距离,且通过直齿条传动连接,所述直齿条的水平移动由其一端的夹控气缸驱动。本发明结构设计合理,根据两组对应的偏心夹辊的转动进行夹紧,夹持方便、牢固,能实现快速搬运工件,解放了人力,避免了人工搬运过程中存在的安全隐患。