
一种舵机及带有该舵机的机器人关节及机器人.pdf

小忆****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种舵机及带有该舵机的机器人关节及机器人.pdf
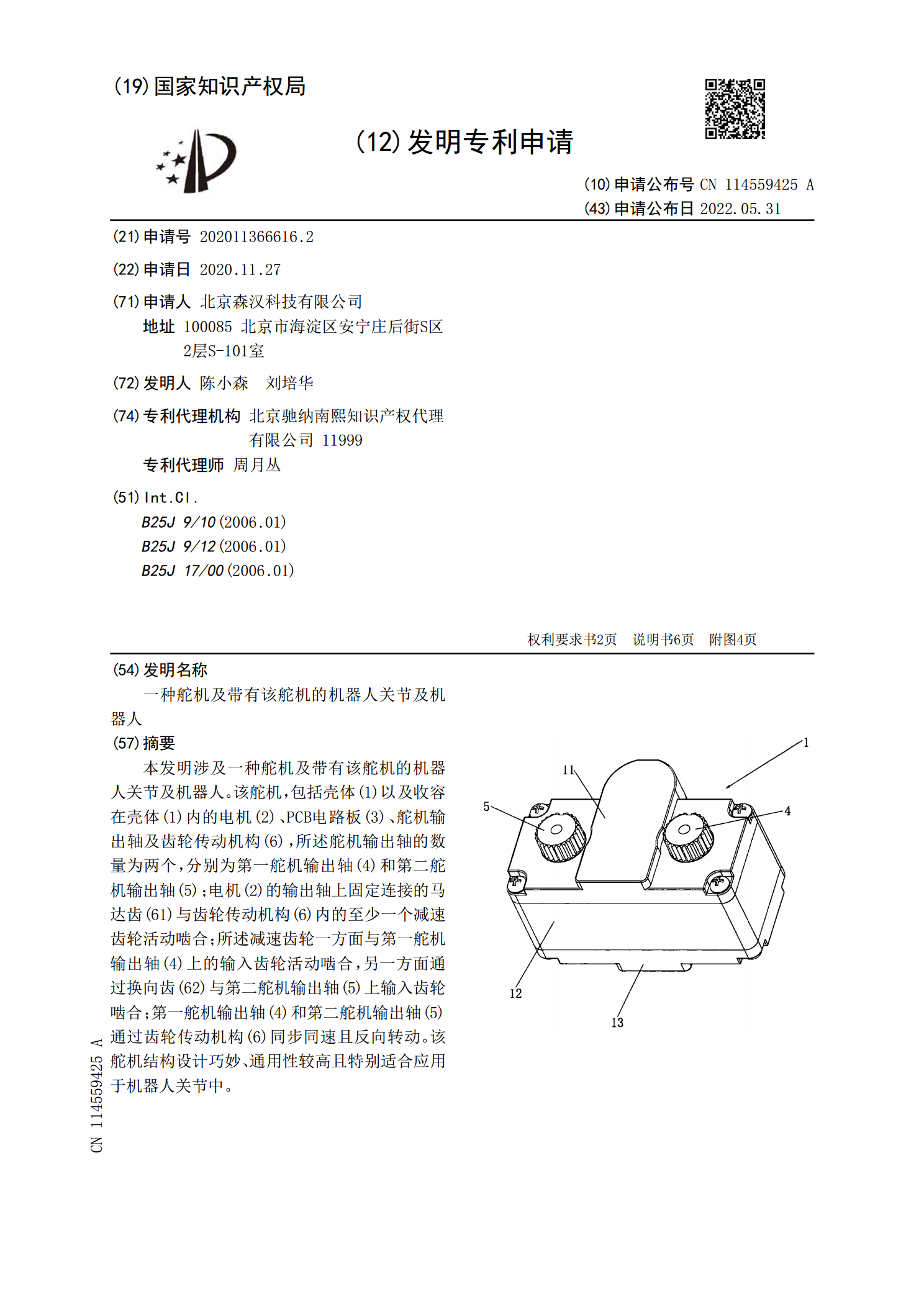
本发明涉及一种舵机及带有该舵机的机器人关节及机器人。该舵机,包括壳体(1)以及收容在壳体(1)内的电机(2)、PCB电路板(3)、舵机输出轴及齿轮传动机构(6),所述舵机输出轴的数量为两个,分别为第一舵机输出轴(4)和第二舵机输出轴(5);电机(2)的输出轴上固定连接的马达齿(61)与齿轮传动机构(6)内的至少一个减速齿轮活动啮合;所述减速齿轮一方面与第一舵机输出轴(4)上的输入齿轮活动啮合,另一方面通过换向齿(62)与第二舵机输出轴(5)上输入齿轮啮合;第一舵机输出轴(4)和第二舵机输出轴(5)通过齿轮

一种舵机及带有该舵机的机器人关节及机器人.pdf
本发明涉及一种舵机及带有该舵机的机器人关节及机器人。该舵机包括收容在壳体内的电机、两个PCB电路板、舵机输出轴及齿轮减速机构。齿轮减速机构的数量为两组。舵机输出轴和电机的数量均为两个。任一电机主轴上的马达齿通过任一齿轮减速机构与任一舵机输出轴上的输入齿轮活动啮合,另一电机主轴上的马达齿通过另一齿轮减速机构与另一舵机输出轴上的输入齿轮活动啮合。任一电机通过任一齿轮减速机构带动任一个舵机输出轴转动,另一电机通过另一齿轮减速机构带动另一个舵机输出轴转动。该舵机的输出稳定性较高、通用性较强且具有两个舵机输出轴,两

关节舵机及机器人.pdf
本发明适用于机器人技术领域,提供了一种关节舵机及具有该关节舵机的机器人,该关节舵机包括电机以及减速箱,减速箱包括箱体以及容置于箱体内的齿轮组,箱体的外形呈圆柱形,电机固定设置于箱体内,本发明提供的关节舵机外形为圆柱形,这使得机器人的关节在绕关节舵机的转轴旋转的过程中不会碰到关节舵机,在设计机器人的关节时,无需为了避让关节舵机而将机器人关节做的很大,提高了机器人关节部位的灵活性。

舵机机器人.docx
小型双足步行机器人的结构及其控制电路设计两足步行是步行方式中自动化程度最高、最为复杂的动态系统。两足步行系统具有非常丰富的动力学特性,对步行的环境要求很低,既能在平地上行走,也能在非结构性的复杂地面上行走,对环境有很好的适应性。与其它足式机器人相比,双足机器人具有支撑面积小,支撑面的形状随时间变化较大,质心的相对位置高的特点。是其中最复杂,控制难度最大的动态系统。但由于双足机器人比其它足式机器人具有更高的灵活性,因此具有自身独特的优势,更适合在人类的生活或工作环境中与人类协同工作,而不需要专门为其对这些环

舵机及机器人.pdf
本发明适用于舵机技术领域,提供了一种舵机及机器人,该舵机包括马达、用于驱动外部机构运动的输出轴以及一侧与马达配合另一侧与输出轴配合且用于将马达的动力传递至输出轴的齿轮组,齿轮组包括环套于输出轴且由马达驱动旋转以带动输出轴旋转的输出齿轮,输出齿轮与输出轴采用间隙配合,舵机还包括套设于输出轴且位于输出轴和输出齿轮之间的定位滑圈,定位滑圈于输出齿轮过载时能够相对于输出齿轮和/或输出轴滑动。本发明提供的舵机在输出轴负载过大,可以有效的降低齿轮的负载,避免齿轮受到损坏。