
舵机机器人.docx

快乐****蜜蜂


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

舵机机器人.docx
小型双足步行机器人的结构及其控制电路设计两足步行是步行方式中自动化程度最高、最为复杂的动态系统。两足步行系统具有非常丰富的动力学特性,对步行的环境要求很低,既能在平地上行走,也能在非结构性的复杂地面上行走,对环境有很好的适应性。与其它足式机器人相比,双足机器人具有支撑面积小,支撑面的形状随时间变化较大,质心的相对位置高的特点。是其中最复杂,控制难度最大的动态系统。但由于双足机器人比其它足式机器人具有更高的灵活性,因此具有自身独特的优势,更适合在人类的生活或工作环境中与人类协同工作,而不需要专门为其对这些环

舵机及机器人.pdf
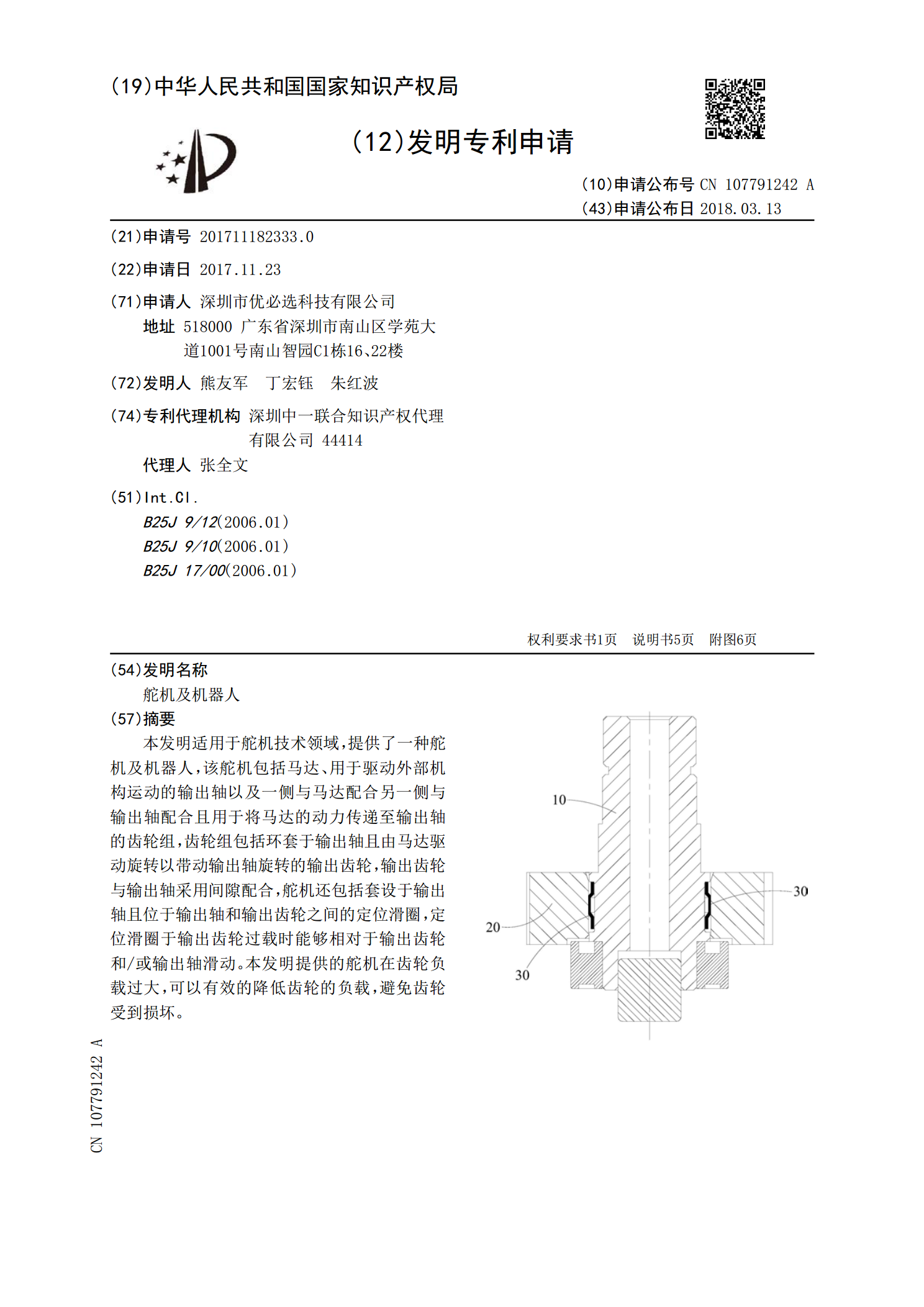
本发明适用于舵机技术领域,提供了一种舵机及机器人,该舵机包括马达、用于驱动外部机构运动的输出轴以及一侧与马达配合另一侧与输出轴配合且用于将马达的动力传递至输出轴的齿轮组,齿轮组包括环套于输出轴且由马达驱动旋转以带动输出轴旋转的输出齿轮,输出齿轮与输出轴采用间隙配合,舵机还包括套设于输出轴且位于输出轴和输出齿轮之间的定位滑圈,定位滑圈于输出齿轮过载时能够相对于输出齿轮和/或输出轴滑动。本发明提供的舵机在输出轴负载过大,可以有效的降低齿轮的负载,避免齿轮受到损坏。

舵机及机器人.pdf
本发明属于舵机技术领域,涉及舵机及机器人。电机组件安装于壳体,电机组件的电机输出轴穿设于壳体,电机输出轴端部连接于谐波减速器的波发生器,刚轮的内齿圈与柔轮的外齿圈啮合。第一轴承将输出部件支承于固定部件。工作时,电机输出轴带动波发生器高速转动,波发生器使得柔轮产生柔性变形,柔轮与刚轮啮合传动,通过输出部件输出动力,作低速转动。输出部件固定有支柱,支柱穿设于空心的电机输出轴。支柱的一端设有第一传感组件,配合控制电路板的第一感应芯片以检测输出部件的转角。舵机结构紧凑、体积小,有利于降低舵机及机器人体积、重量。
舵机及机器人.pdf
本发明适用于舵机技术领域,提供了一种舵机及机器人,该舵机包括马达、用于驱动外部机构运动的输出轴以及一侧与马达配合另一侧与输出轴配合且用于将马达的动力传递至输出轴的齿轮组,齿轮组包括环套于输出轴且由马达驱动旋转以带动输出轴旋转的输出齿轮,输出齿轮与输出轴采用间隙配合,舵机还包括套设于输出轴且位于输出轴和输出齿轮之间的定位滑圈,定位滑圈于输出齿轮过载时能够相对于输出齿轮和/或输出轴滑动。本发明提供的舵机在齿轮负载过大,可以有效的降低齿轮的负载,避免齿轮受到损坏。

舵机及机器人.pdf
本发明适用于舵机技术领域,提供了一种舵机及机器人,该舵机包括马达、输出轴以及一侧与马达啮合另一侧与输出轴啮合的齿轮组,齿轮组包括双联齿轮,双联齿轮包括第一齿轮、固定设置于第一齿轮的一端面且旋转轴线与第一齿轮的旋转轴线重合的连接转轴以及套设于连接转轴且旋转轴线与连接转轴的旋转轴线重合的第二齿轮,第二齿轮设有套设于连接转轴的轴孔,轴孔具有面向连接转轴的内圆面,连接转轴具有与内圆面相面对的外圆面;舵机还包括套设于连接转轴且位于内圆面和外圆面之间的定位滑圈。本发明提供的舵机在机器人摔倒或者受到碰撞时,可以降低双联