
目标轨迹追踪方法及装置、存储介质、电子设备.pdf

文阁****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
目标轨迹追踪方法及装置、存储介质、电子设备.pdf
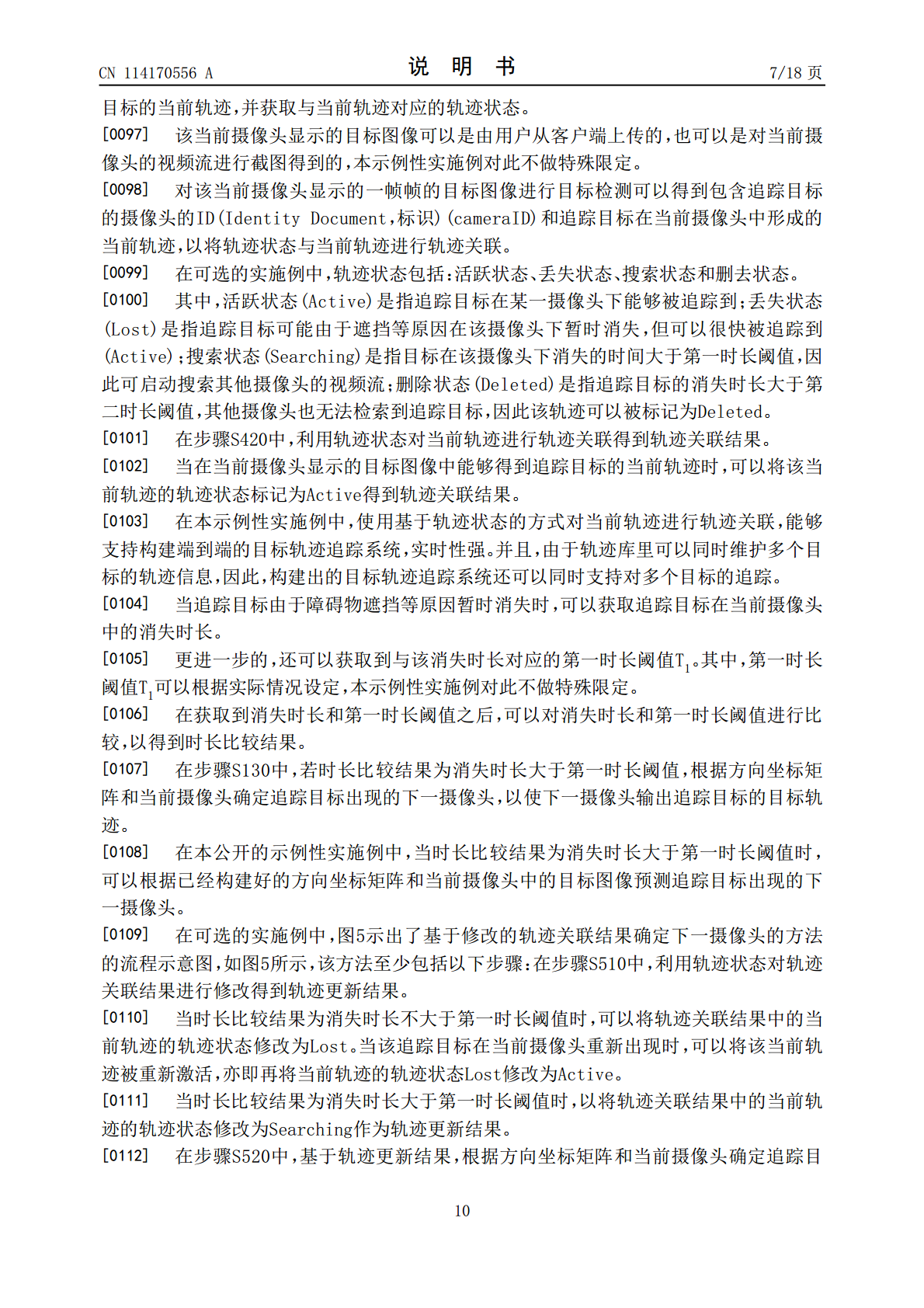
本公开属于轨迹追踪技术领域,涉及一种目标轨迹追踪方法及装置、存储介质、电子设备。该方法包括:获取多个摄像头的位置信息,并根据位置信息构建多个摄像头的方向坐标矩阵;获取追踪目标在多个摄像头中的当前摄像头中的消失时长以及与消失时长对应的第一时长阈值,并对消失时长和第一时长阈值进行比较得到时长比较结果;若时长比较结果为消失时长大于所述第一时长阈值,根据方向坐标矩阵和当前摄像头确定追踪目标出现的下一摄像头,以使下一摄像头输出追踪目标的目标轨迹。本公开缩小了查询空间,提高了跨摄像头的目标检索效率和重识别准确率,降低
一种倒车轨迹追踪方法、装置、电子设备及存储介质.pdf
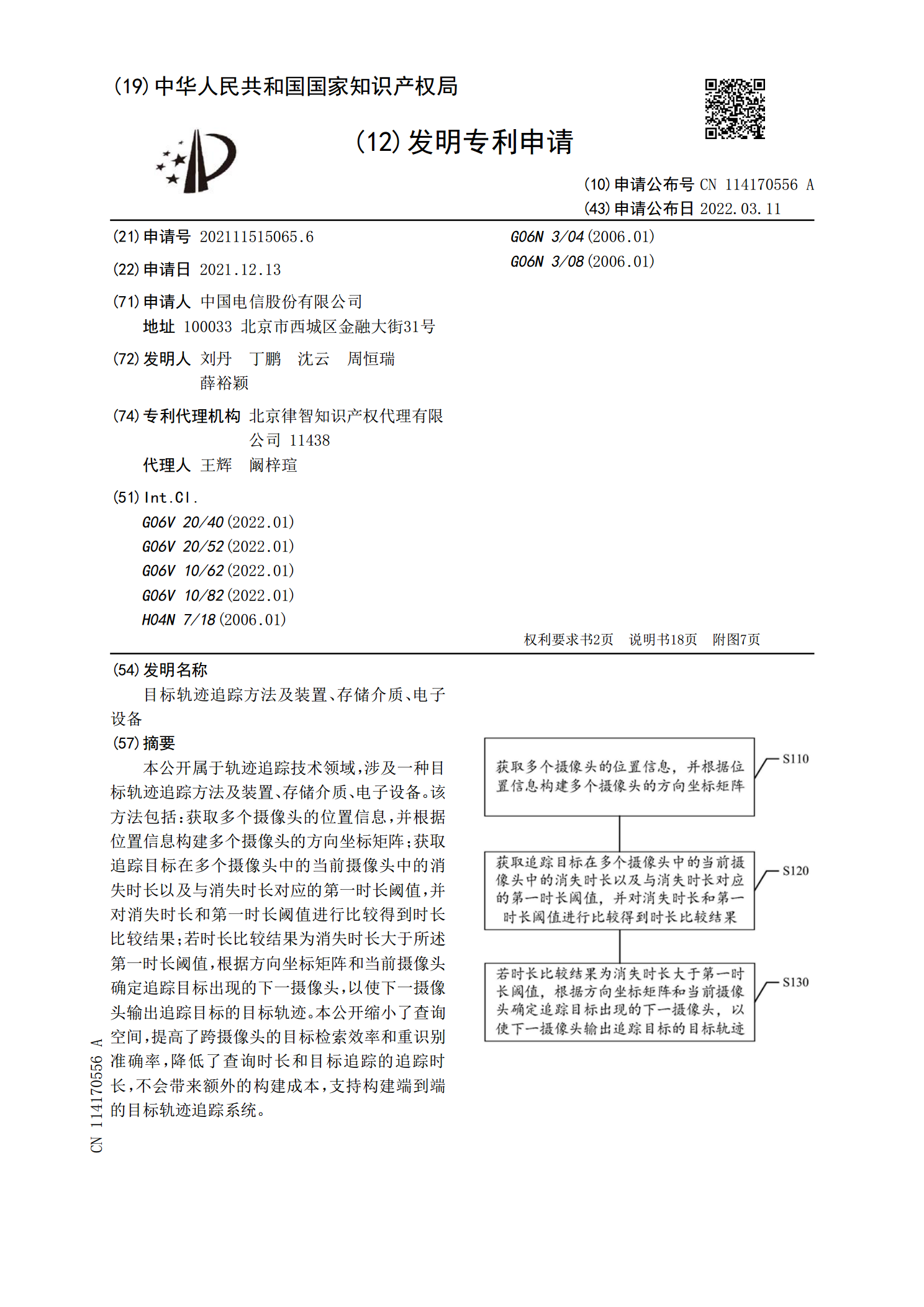
本申请实施例公开了一种倒车轨迹追踪方法、装置、电子设备及存储介质,涉及自动驾驶领域,尤其涉及自主泊车领域及轨迹追踪领域。具体实现方案为:获取车辆的定位信息及参考轨迹;根据车辆的定位信息及参考轨迹,确定车辆相对于参考轨迹的航向误差和横向误差;根据航向误差、横向误差及车辆的速度,确定车辆的期望前轮转角;利用车辆的期望前轮转角,调整车辆的实际前轮转角。本申请实施例提供了灵活性更高、且适用范围更广的倒车轨迹追踪方法。
目标行人轨迹预测方法、装置、电子设备及存储介质.pdf
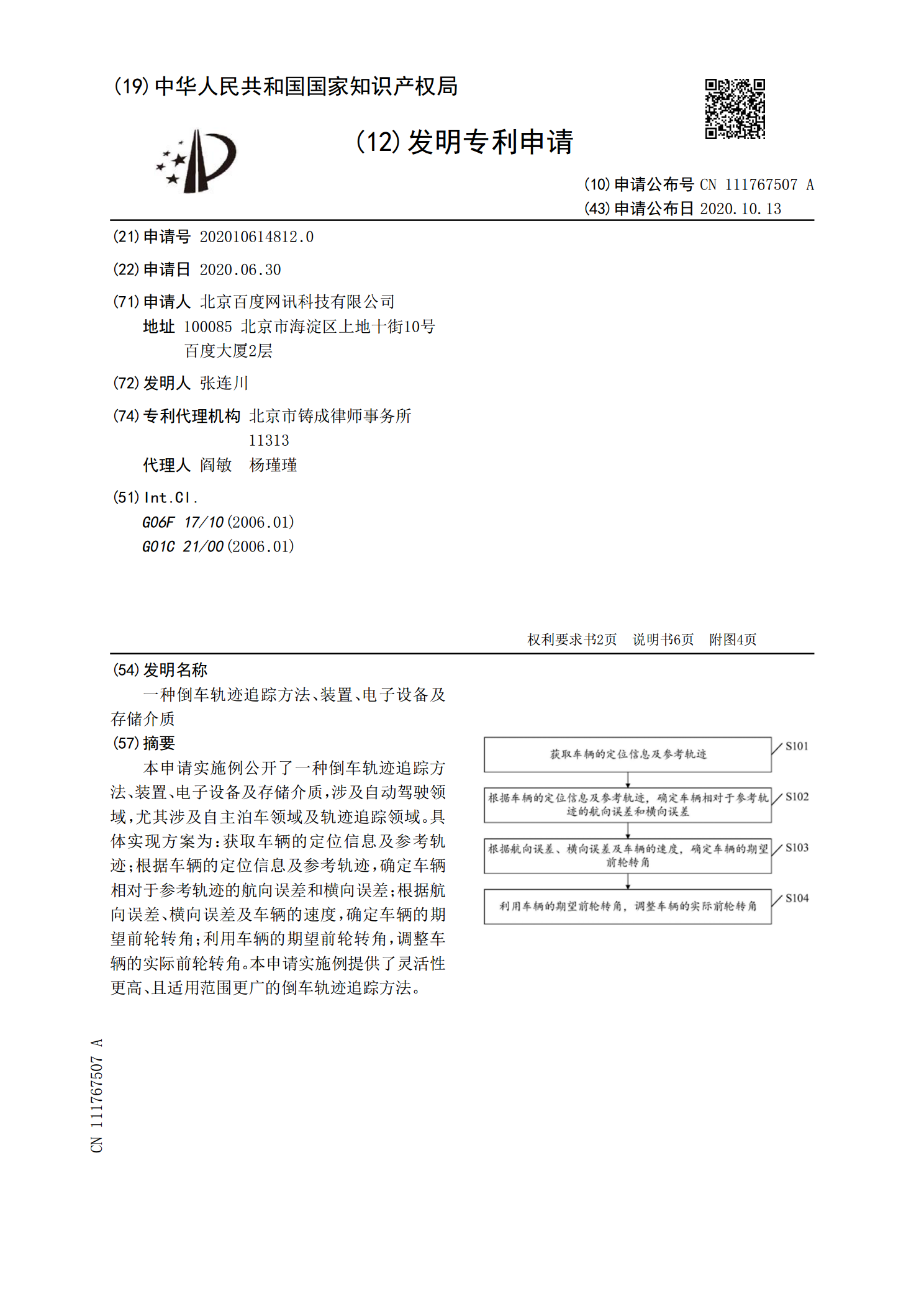
本公开提供了一种目标行人轨迹预测方法,包括:确定预测主目标及辅助观测目标,将预测主目标的观测轨迹转换为在预测主目标的自我视角坐标系中的观测轨迹以及在辅助观测目标的自我视角坐标系中的观测轨迹;计算预测主目标在各个重要视角下的运动趋势特征;分别计算主目标视角和各个辅助目标视角的未来轨迹隐含特征;分别进行关键特征提取,生成预测主目标的主目标视角隐含关键特征以及辅助目标视角隐含关键特征;以及,对预测主目标的主目标视角隐含关键特征以及辅助目标视角隐含关键特征进行解码处理,生成预测主目标的未来轨迹。本公开还提供一种目
物体追踪方法、物体追踪装置、存储介质及电子设备.pdf
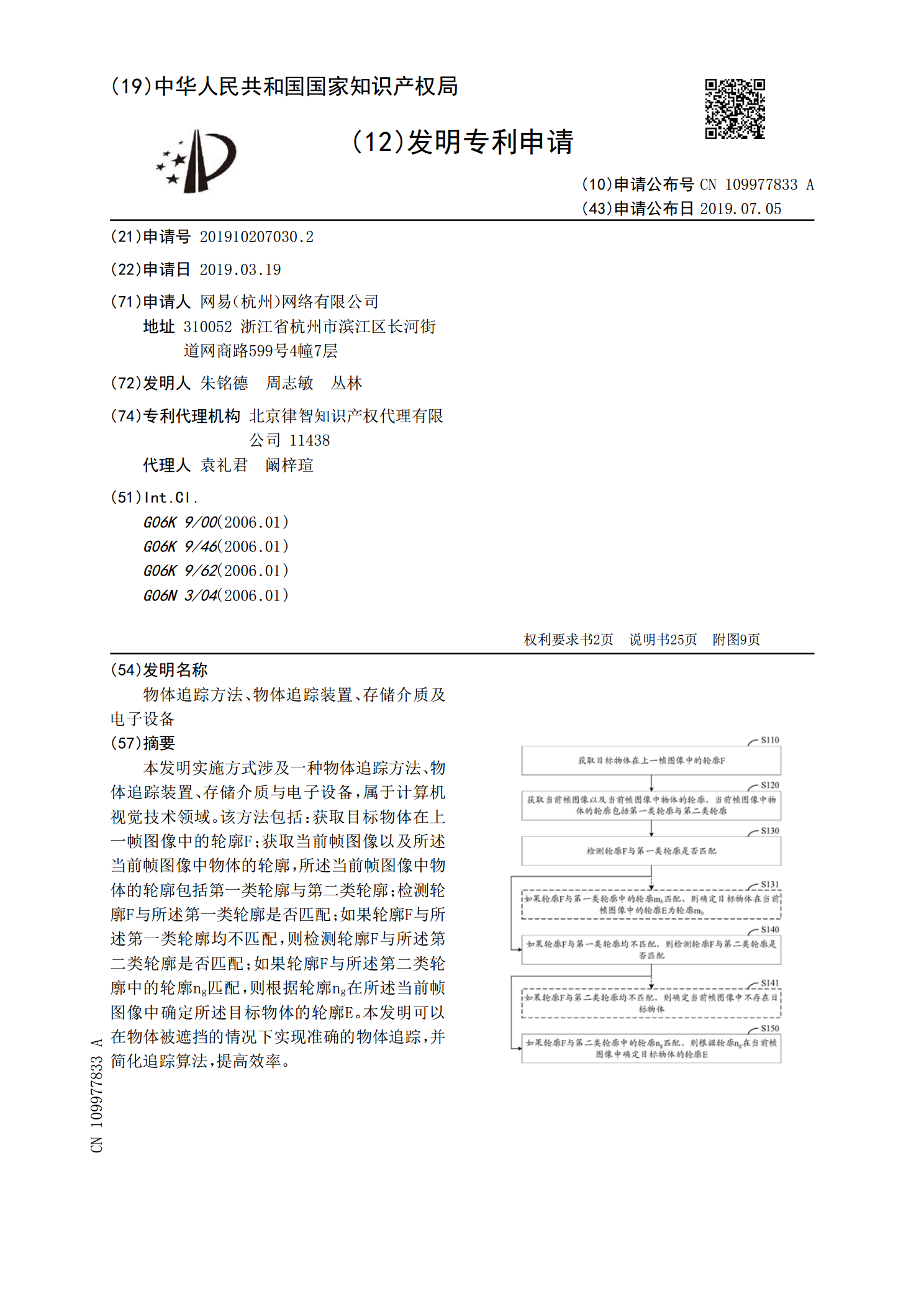
本发明实施方式涉及一种物体追踪方法、物体追踪装置、存储介质与电子设备,属于计算机视觉技术领域。该方法包括:获取目标物体在上一帧图像中的轮廓F;获取当前帧图像以及所述当前帧图像中物体的轮廓,所述当前帧图像中物体的轮廓包括第一类轮廓与第二类轮廓;检测轮廓F与所述第一类轮廓是否匹配;如果轮廓F与所述第一类轮廓均不匹配,则检测轮廓F与所述第二类轮廓是否匹配;如果轮廓F与所述第二类轮廓中的轮廓n

任务追踪方法、装置、电子设备及存储介质.pdf
本公开关于一种任务追踪方法、装置、电子设备及存储介质,该方法包括在监测到目标任务的第一任务分发指令的情况下,确定目标任务的任务发起账号和至少一个任务接收账号;获取至少一个任务接收账号的任务状态;基于任务发起账号、至少一个任务接收账号和任务状态,生成目标任务的目标任务追踪信息,目标任务追踪信息为以任务发起账号为父节点、至少一个任务接收账号为子节点的层级结构,且子节点包含对应的任务接收账号的任务状态;展示目标任务追踪信息。利用本公开实施例可以可以精准展示目标任务的任务分发情况和任务状态等任务执行情况,便于对目