
基于视频流的目标追踪监测方法、系统、装置及存储介质.pdf

新月****姐a

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于视频流的目标追踪监测方法、系统、装置及存储介质.pdf
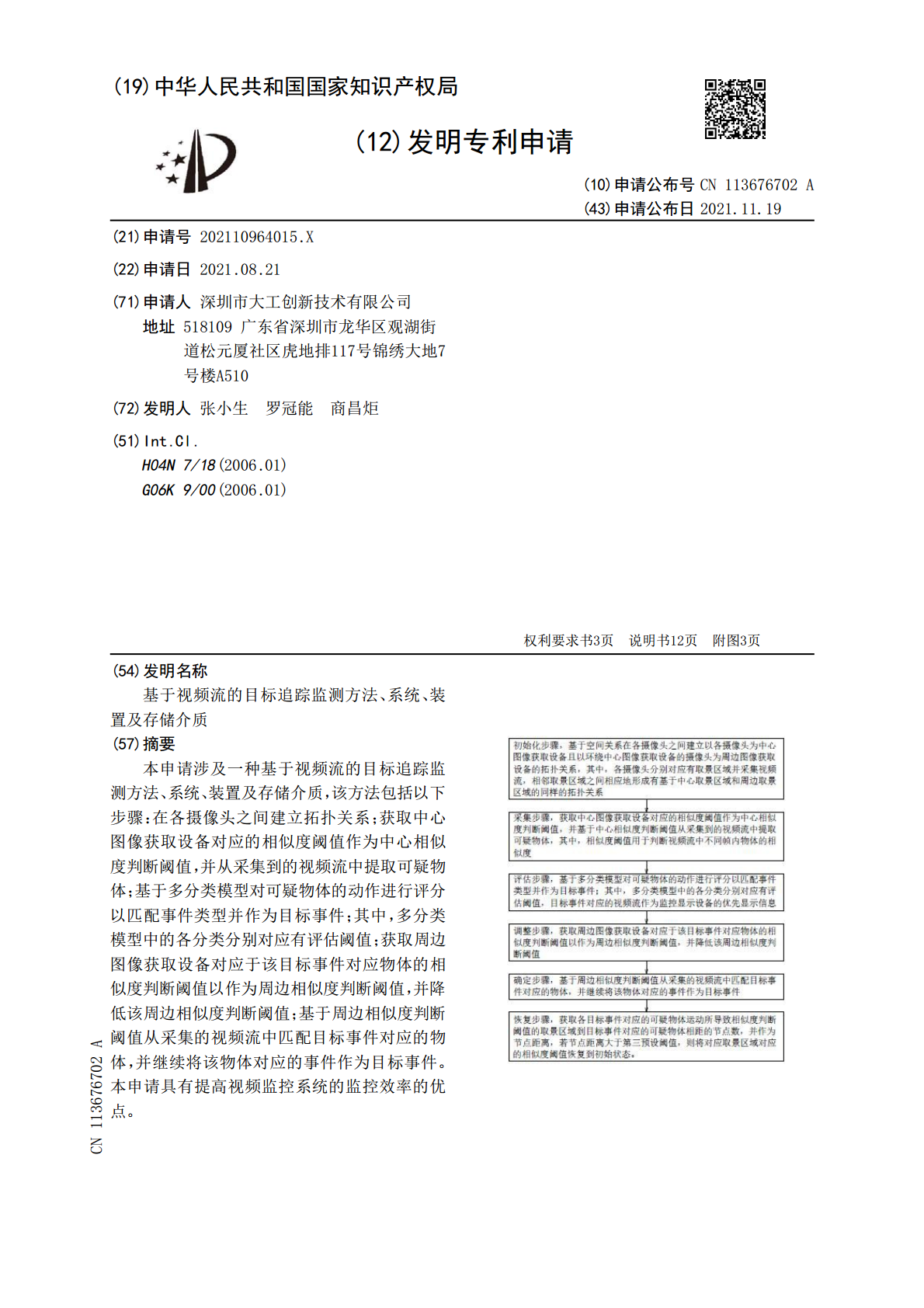
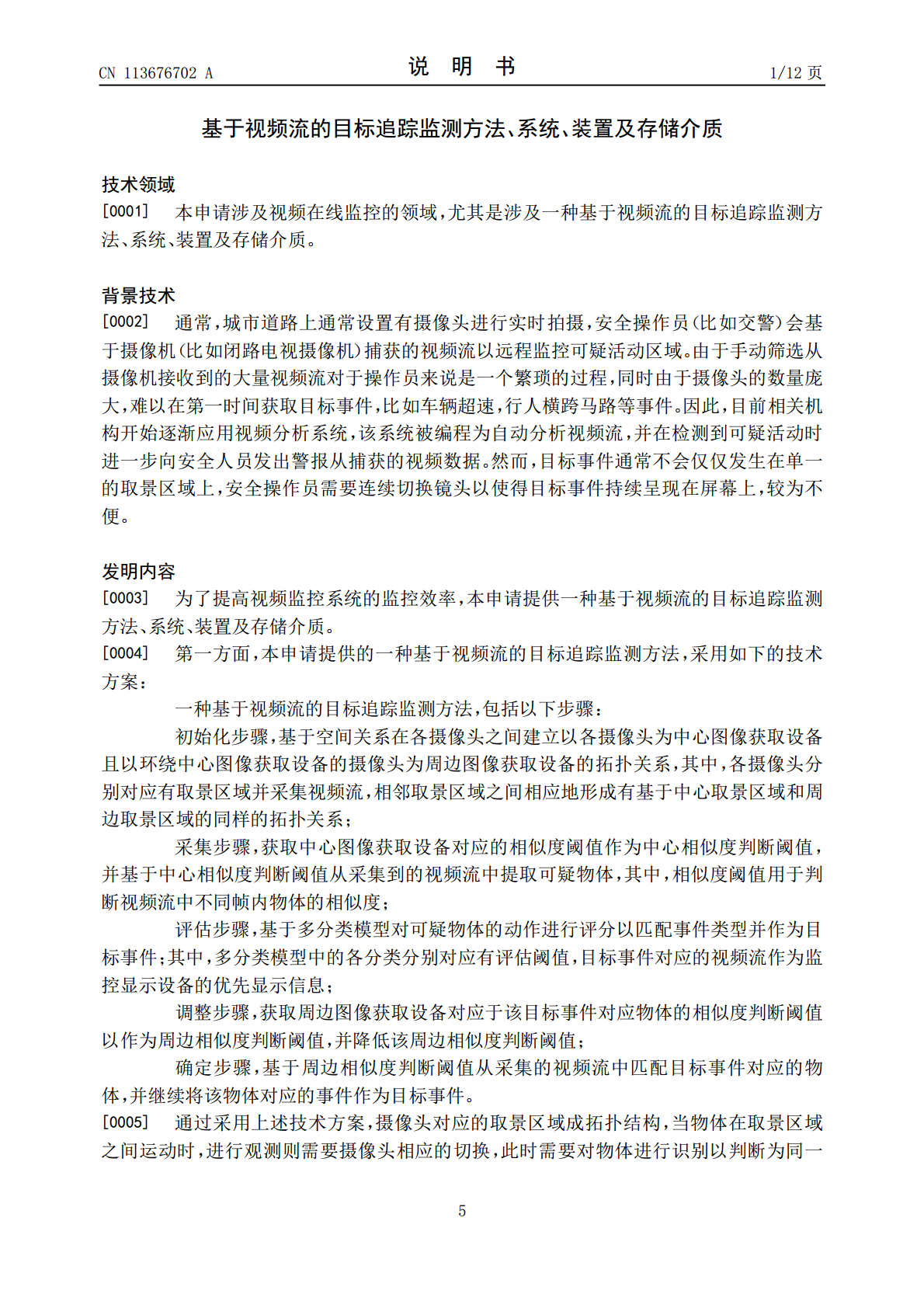
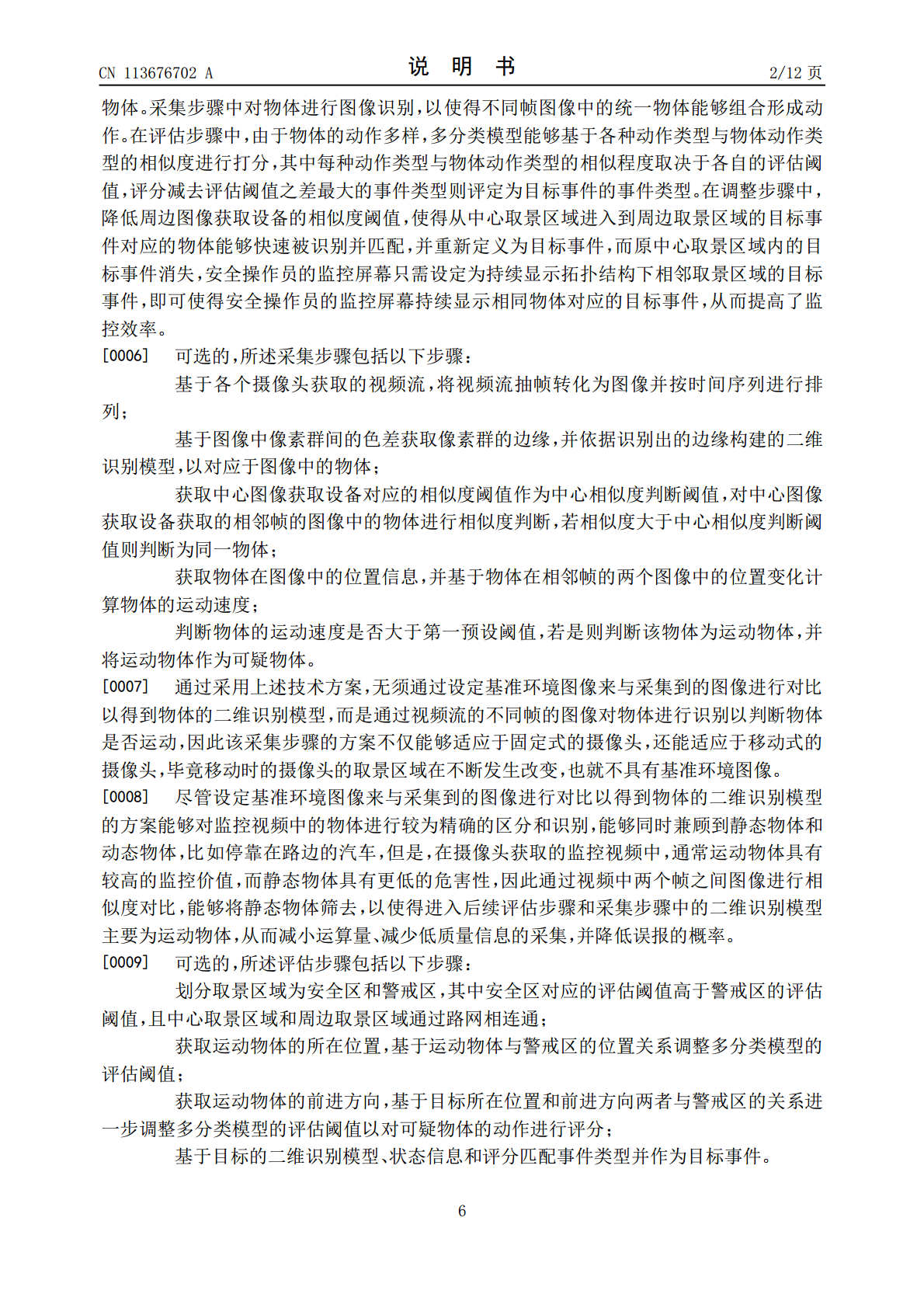
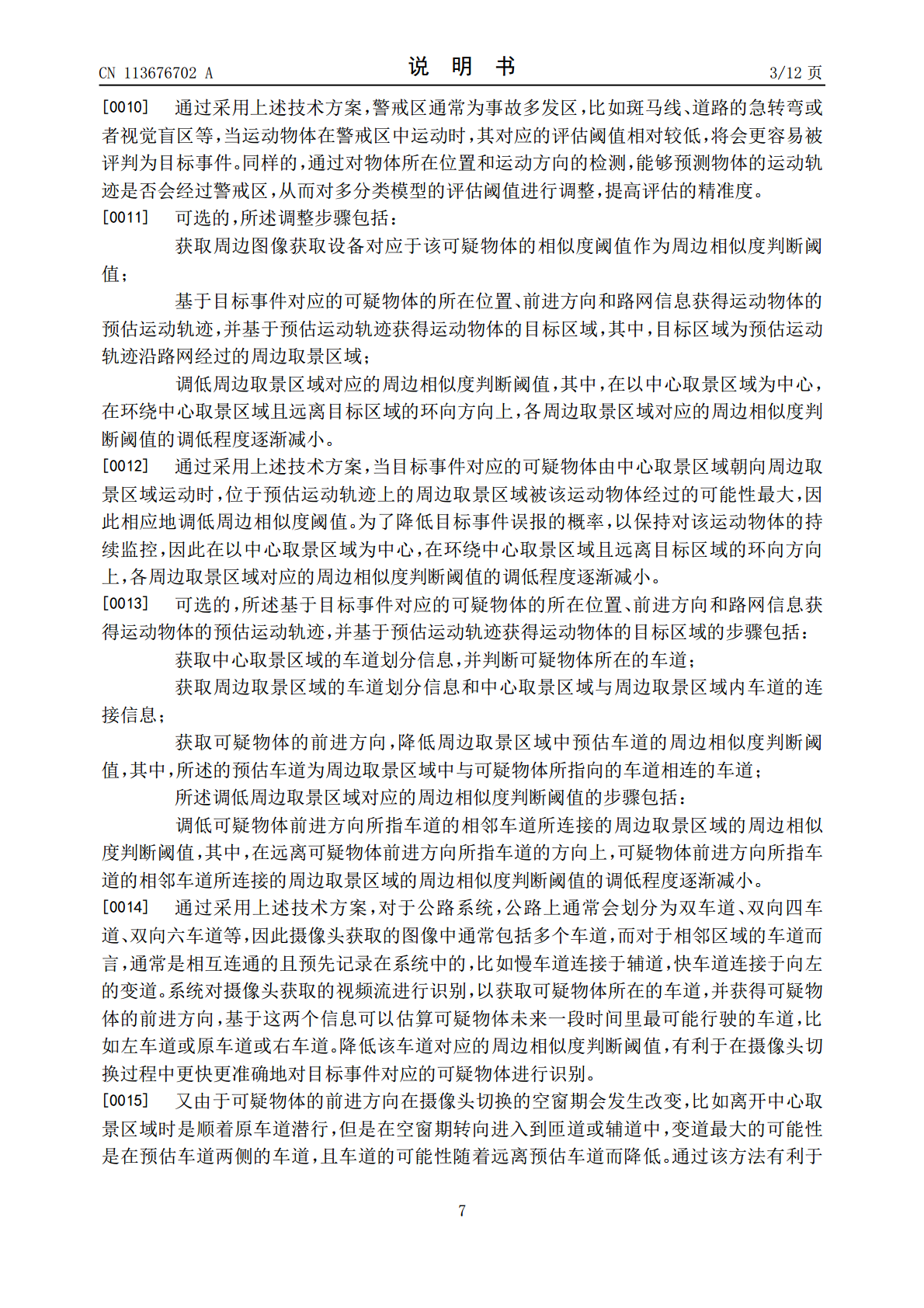
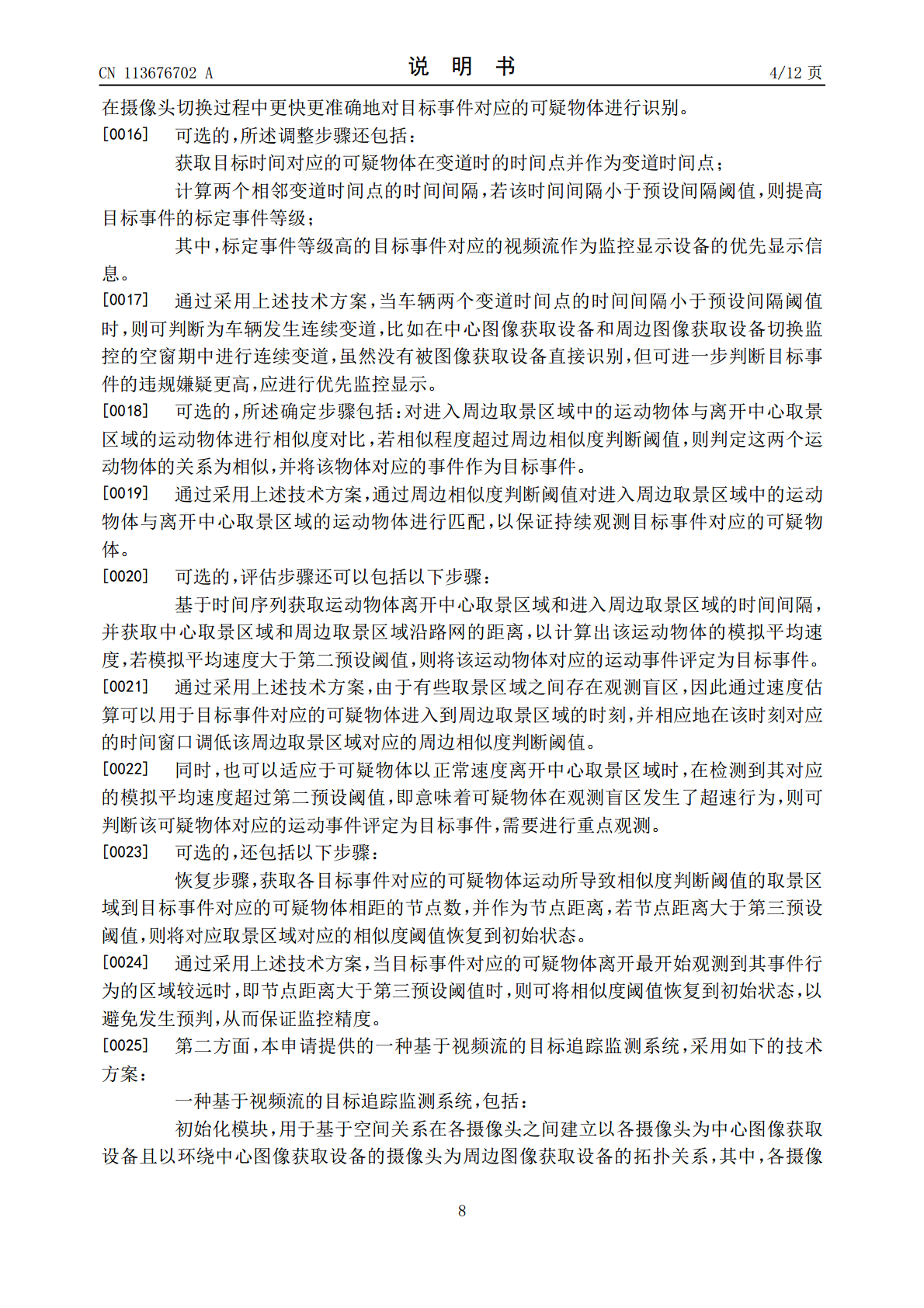
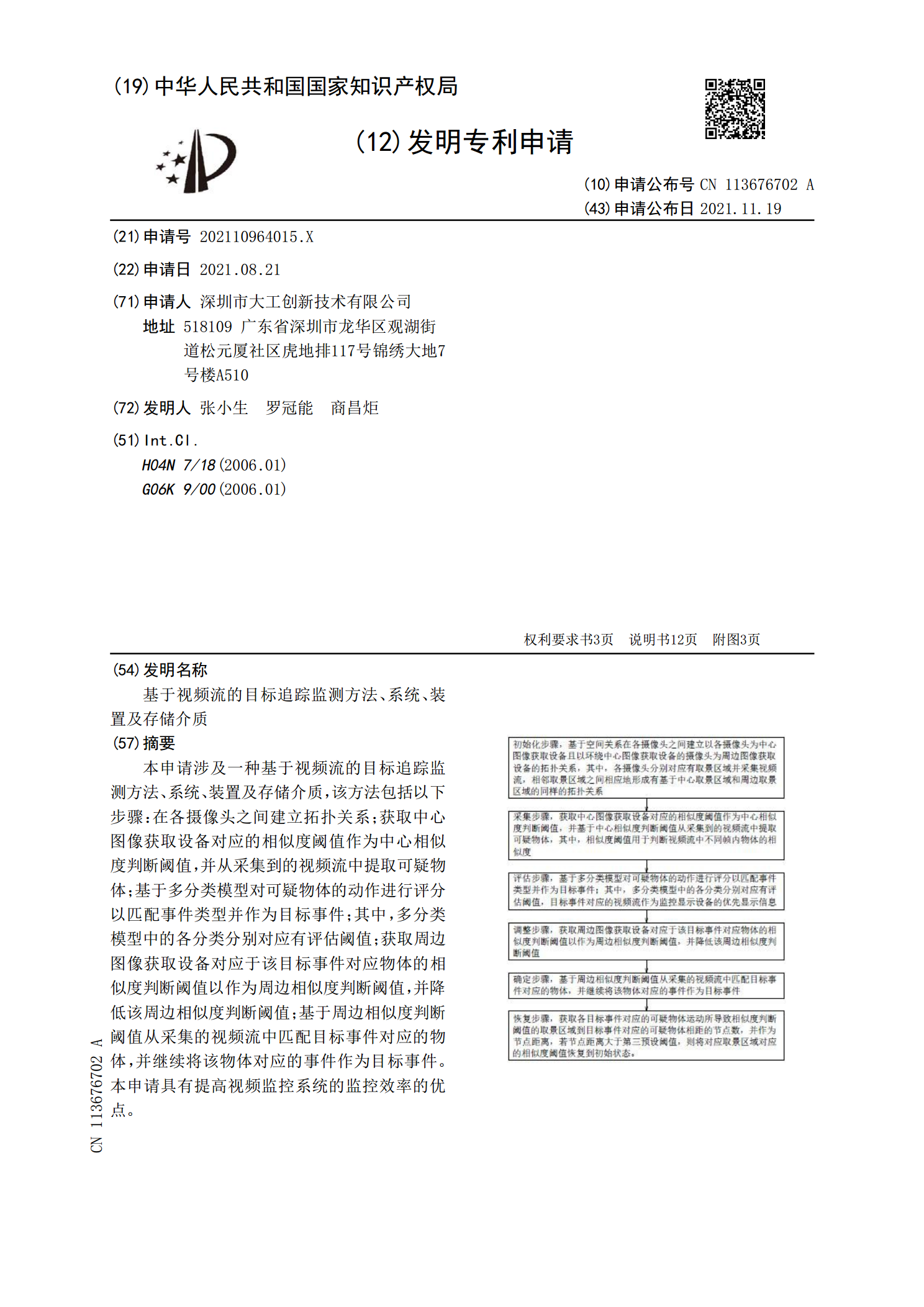
本申请涉及一种基于视频流的目标追踪监测方法、系统、装置及存储介质,该方法包括以下步骤:在各摄像头之间建立拓扑关系;获取中心图像获取设备对应的相似度阈值作为中心相似度判断阈值,并从采集到的视频流中提取可疑物体;基于多分类模型对可疑物体的动作进行评分以匹配事件类型并作为目标事件;其中,多分类模型中的各分类分别对应有评估阈值;获取周边图像获取设备对应于该目标事件对应物体的相似度判断阈值以作为周边相似度判断阈值,并降低该周边相似度判断阈值;基于周边相似度判断阈值从采集的视频流中匹配目标事件对应的物体,并继续将该物

视频处理方法、装置、视频追踪方法、装置及存储介质.pdf
本申请公开了一种视频处理方法、装置、视频追踪方法、装置及存储介质。其中,响应于请求端对目标视频数据的获取请求,获取请求端的用户标识;生成目标视频数据对应的N份切片序列;N份切片序列中M份切片序列的单帧图像中均携带有编码标识;不同份的切片序列中编码标识的图像位置不同;基于用户标识,从N份切片序列中分别提取至少一组切片数据,得到重组后的切片序列;重组后的切片序列的m组切片数据中,编码标识的图像位置用于唯一地指示用户标识;以及将重组后的切片序列发送至请求端,以供请求端播放重组后的切片序列。可以解决现有技术中存在

基于视频流的定损方法、装置、设备及存储介质.pdf
本发明涉及人工智能领域,公开了一种基于视频流的定损方法、装置、设备及存储介质,用于提高理赔定损的准确率。所述基于视频流的定损方法包括:对多个视频帧进行路况和天气识别,得到目标路况信息和目标天气信息;对多个视频帧进行事故车辆识别,得到目标事故车辆;对多个视频帧进行伤者识别,得到目标伤者;对现场勘测视频流进行音频提取,得到目标音频,并对目标音频进行语音分析,得到对话流畅度和对话合理度;将目标路况信息、目标天气信息、目标事故车辆、目标伤者、对话流畅度和对话合理度输入理赔金额预测模型进行理赔金额预测,得到目标理赔

基于光场视频流的抓拍方法及装置、存储介质.pdf
本发明公开了一种基于光场视频流的抓拍方法,该基于光场视频流的抓拍方法包括:获取相机阵列按照预设采集频率采集的光场数据和图像数据,所述相机阵列包括预设数量的按照预设规则排列的相机;根据预设渲染频率对所述光场数据和所述图像数据进行渲染,得到若干路数的视频流;根据预设检测频率对所述视频流包括的图像进行目标检测,得到包括目标图像的待选集合,其中,所述预设检测频率不小于所述预设采集频率;从所述待选集合中获取图像质量满足预设条件的目标图像的目标集合。本发明还公开了一种基于光场视频流的抓拍装置、计算机装置和计算机可读存
基于光电吊舱的目标追踪方法、装置、设备及存储介质.pdf
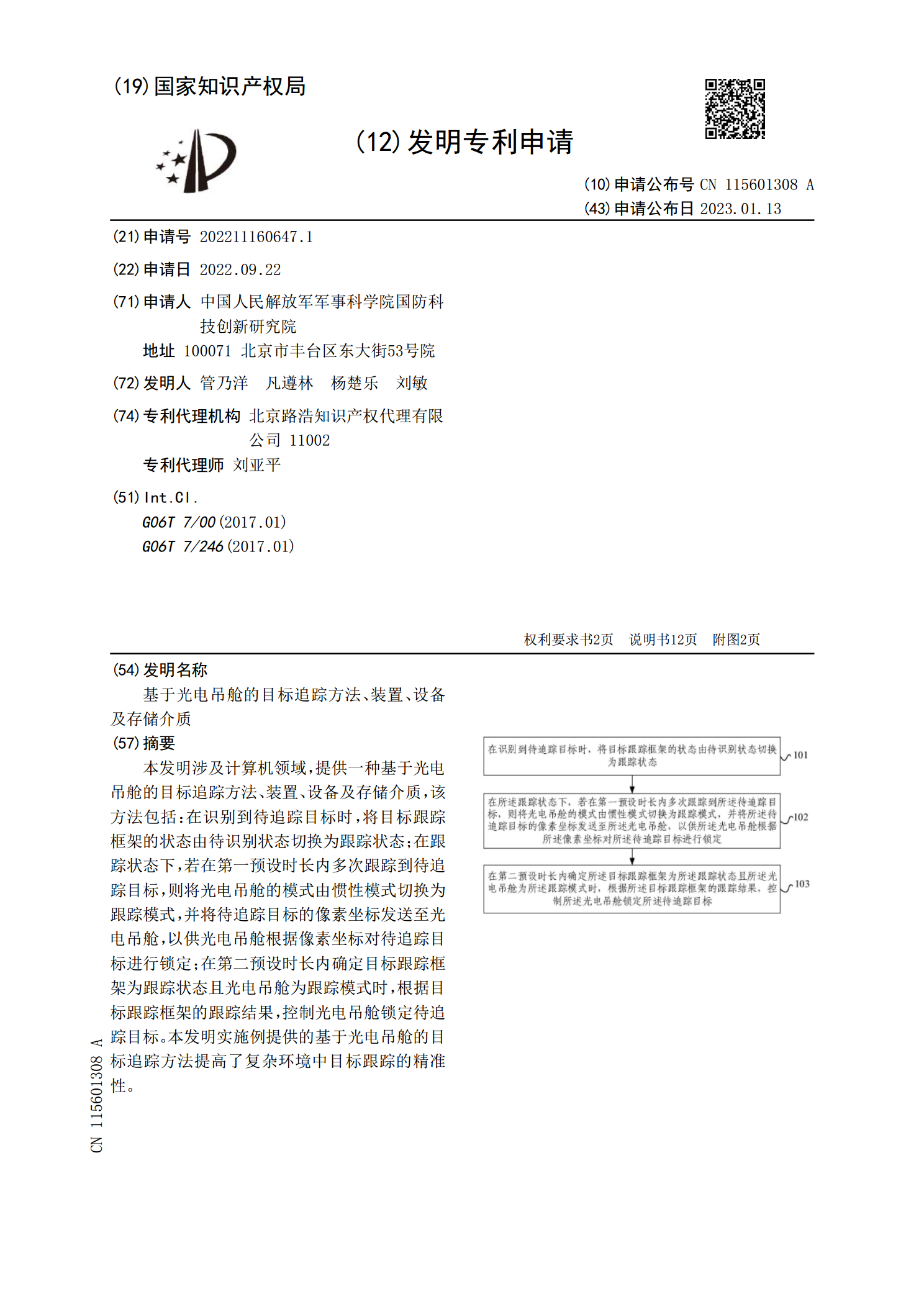
本发明涉及计算机领域,提供一种基于光电吊舱的目标追踪方法、装置、设备及存储介质,该方法包括:在识别到待追踪目标时,将目标跟踪框架的状态由待识别状态切换为跟踪状态;在跟踪状态下,若在第一预设时长内多次跟踪到待追踪目标,则将光电吊舱的模式由惯性模式切换为跟踪模式,并将待追踪目标的像素坐标发送至光电吊舱,以供光电吊舱根据像素坐标对待追踪目标进行锁定;在第二预设时长内确定目标跟踪框架为跟踪状态且光电吊舱为跟踪模式时,根据目标跟踪框架的跟踪结果,控制光电吊舱锁定待追踪目标。本发明实施例提供的基于光电吊舱的目标追踪方