
基于蓝牙定位的目标追踪方法、装置、设备及存储介质.pdf

书生****ma

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于蓝牙定位的目标追踪方法、装置、设备及存储介质.pdf
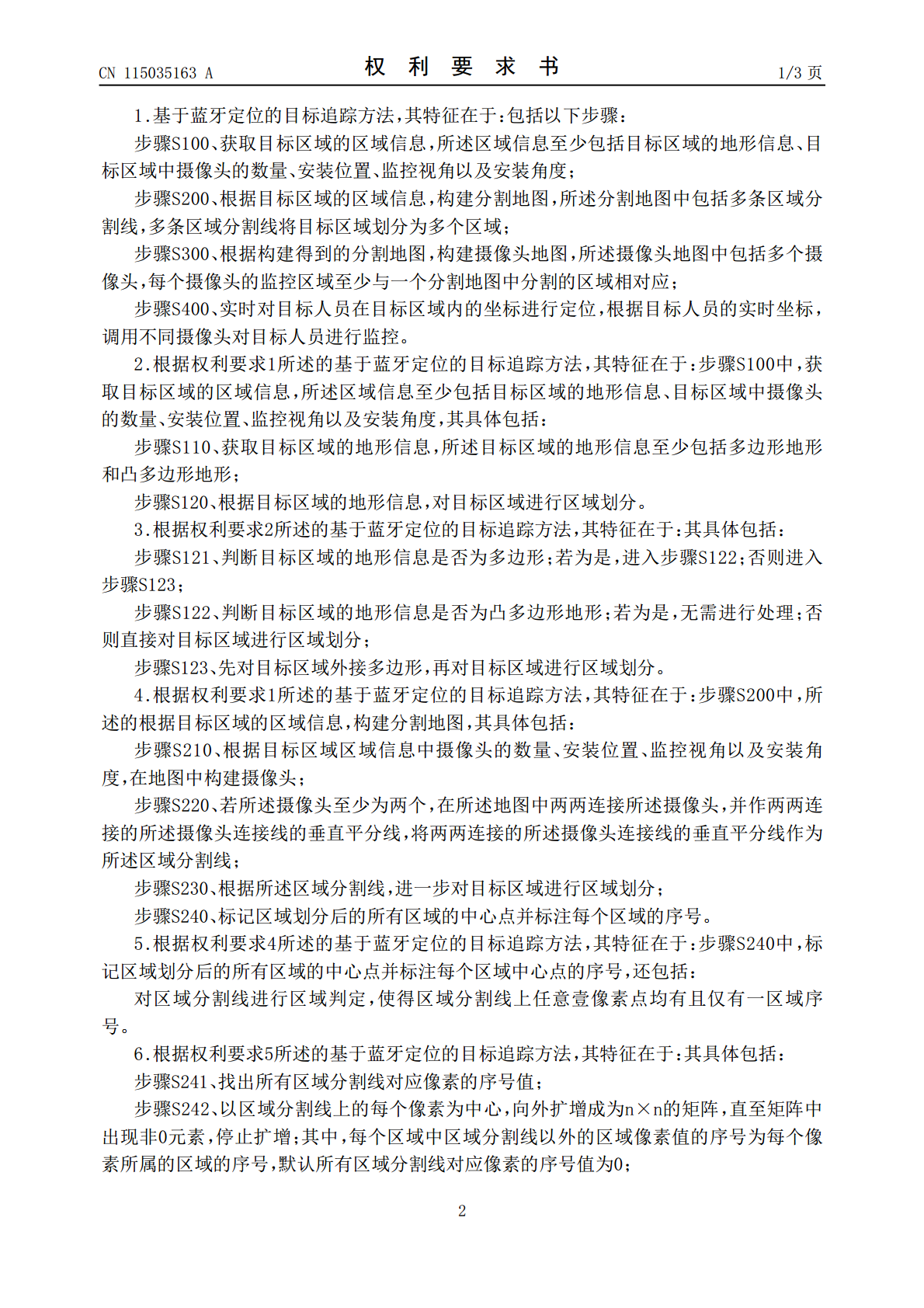
本发明公开了一种基于蓝牙定位的目标追踪方法、装置、设备及存储介质,属于人员定位技术领域。所述方法包括获取目标区域的区域信息;根据目标区域的区域信息,构建分割地图;根据构建得到的分割地图,构建摄像头地图;实时对目标人员在目标区域内的坐标进行定位,根据目标人员的实时坐标,调用不同摄像头对目标人员进行监控。本发明可以自动对摄像头的监控区域进行划分,不用再经过复杂的计算,方便快捷;同时不需要大量警力去查看监控,当发生紧急情况时,系统可以自动切换所定位人员的监控画面,节省了人力;此外,由于将蓝牙定位和视频监控相结合
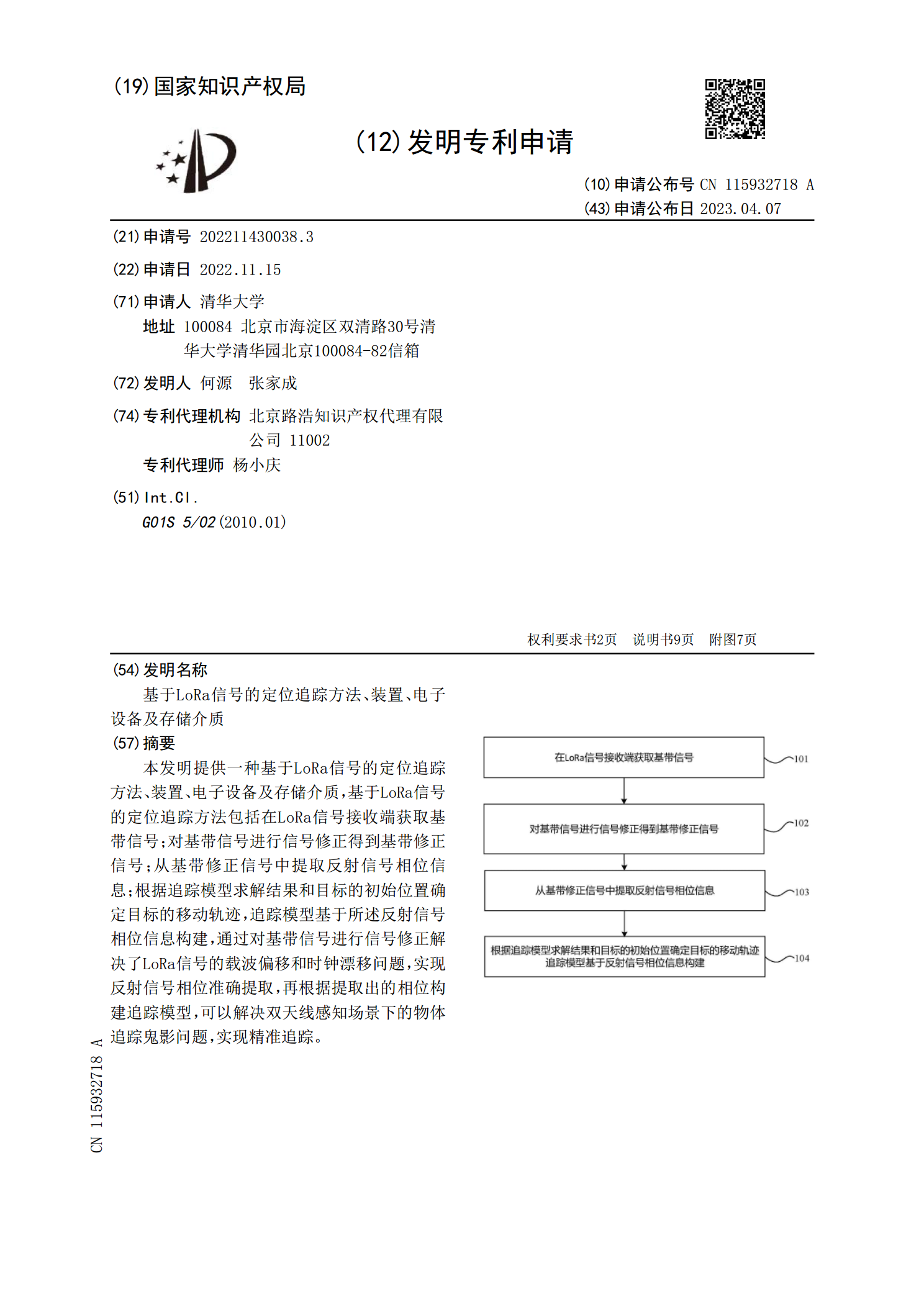
基于LoRa信号的定位追踪方法、装置、电子设备及存储介质.pdf
本发明提供一种基于LoRa信号的定位追踪方法、装置、电子设备及存储介质,基于LoRa信号的定位追踪方法包括在LoRa信号接收端获取基带信号;对基带信号进行信号修正得到基带修正信号;从基带修正信号中提取反射信号相位信息;根据追踪模型求解结果和目标的初始位置确定目标的移动轨迹,追踪模型基于所述反射信号相位信息构建,通过对基带信号进行信号修正解决了LoRa信号的载波偏移和时钟漂移问题,实现反射信号相位准确提取,再根据提取出的相位构建追踪模型,可以解决双天线感知场景下的物体追踪鬼影问题,实现精准追踪。
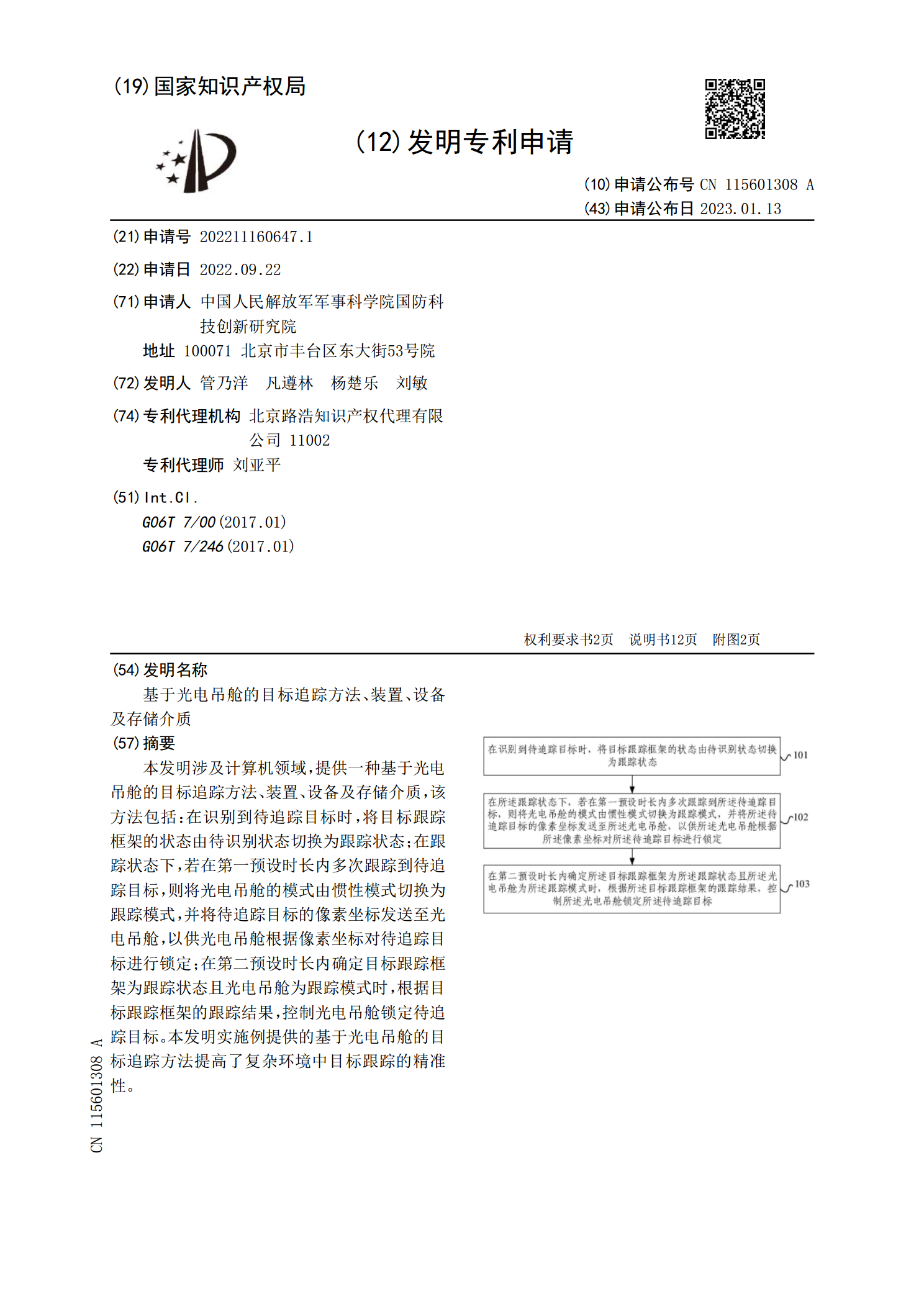
基于光电吊舱的目标追踪方法、装置、设备及存储介质.pdf
本发明涉及计算机领域,提供一种基于光电吊舱的目标追踪方法、装置、设备及存储介质,该方法包括:在识别到待追踪目标时,将目标跟踪框架的状态由待识别状态切换为跟踪状态;在跟踪状态下,若在第一预设时长内多次跟踪到待追踪目标,则将光电吊舱的模式由惯性模式切换为跟踪模式,并将待追踪目标的像素坐标发送至光电吊舱,以供光电吊舱根据像素坐标对待追踪目标进行锁定;在第二预设时长内确定目标跟踪框架为跟踪状态且光电吊舱为跟踪模式时,根据目标跟踪框架的跟踪结果,控制光电吊舱锁定待追踪目标。本发明实施例提供的基于光电吊舱的目标追踪方
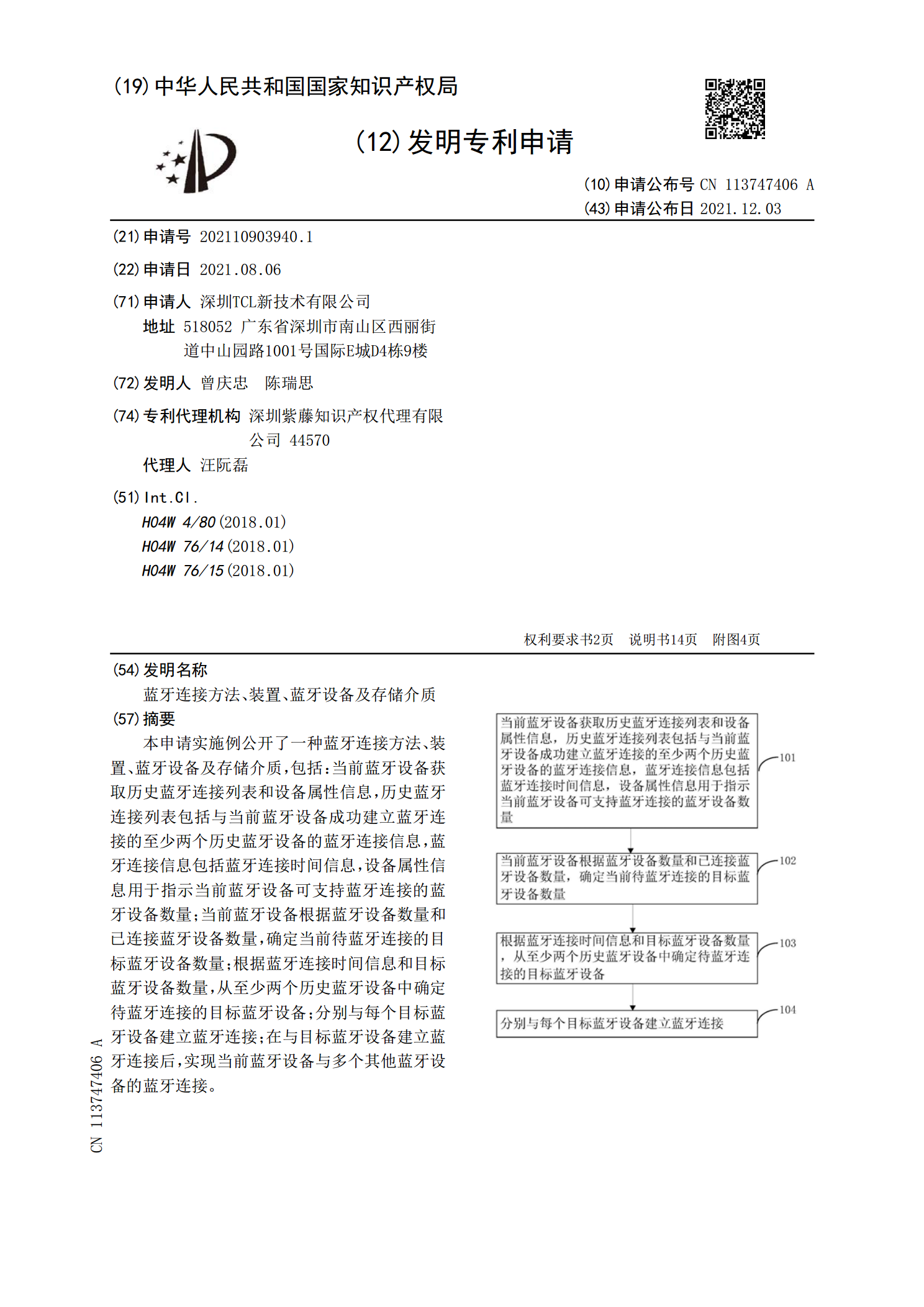
蓝牙连接方法、装置、蓝牙设备及存储介质.pdf
本申请实施例公开了一种蓝牙连接方法、装置、蓝牙设备及存储介质,包括:当前蓝牙设备获取历史蓝牙连接列表和设备属性信息,历史蓝牙连接列表包括与当前蓝牙设备成功建立蓝牙连接的至少两个历史蓝牙设备的蓝牙连接信息,蓝牙连接信息包括蓝牙连接时间信息,设备属性信息用于指示当前蓝牙设备可支持蓝牙连接的蓝牙设备数量;当前蓝牙设备根据蓝牙设备数量和已连接蓝牙设备数量,确定当前待蓝牙连接的目标蓝牙设备数量;根据蓝牙连接时间信息和目标蓝牙设备数量,从至少两个历史蓝牙设备中确定待蓝牙连接的目标蓝牙设备;分别与每个目标蓝牙设备建立蓝
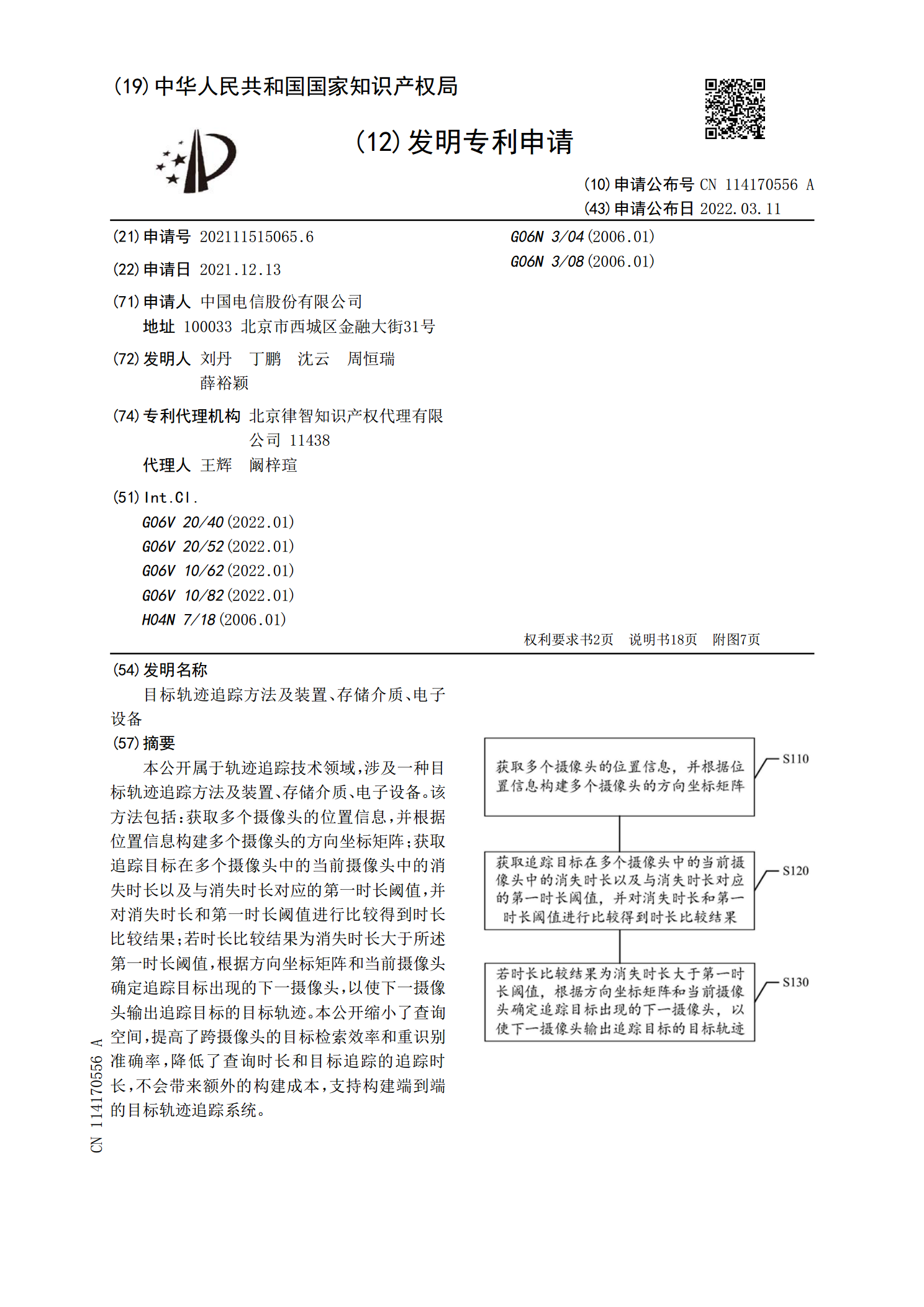
目标轨迹追踪方法及装置、存储介质、电子设备.pdf
本公开属于轨迹追踪技术领域,涉及一种目标轨迹追踪方法及装置、存储介质、电子设备。该方法包括:获取多个摄像头的位置信息,并根据位置信息构建多个摄像头的方向坐标矩阵;获取追踪目标在多个摄像头中的当前摄像头中的消失时长以及与消失时长对应的第一时长阈值,并对消失时长和第一时长阈值进行比较得到时长比较结果;若时长比较结果为消失时长大于所述第一时长阈值,根据方向坐标矩阵和当前摄像头确定追踪目标出现的下一摄像头,以使下一摄像头输出追踪目标的目标轨迹。本公开缩小了查询空间,提高了跨摄像头的目标检索效率和重识别准确率,降低