
工业机器人离线编程与仿真课后习题.pdf

文库****品店

1/3
2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

工业机器人离线编程与仿真课后习题.pdf
第一章ROBOGUIDE概述一、填空题①ROBOGUIDE软件常用仿真功能主要包括:工件加工仿真(ChamferingPRO)、物料搬运仿真(HandlingPRO)、工艺仿真(WeldPRO)、码垛仿真(PalletPRO)、喷涂仿真(PaintPRO)等。②ROBOGUIDE软件中,搬运仿真模块可加载运用弧焊工具包、搬运工具包、点焊工具包、MATE控制器点焊工具包等。③ROBOGUIDE软件菜单栏主要分文件、编辑、视图、元素和机器人等共11个菜单选项。④在ROBOGUIDE软件窗口中,读者可以通过鼠标

《焊接机器人离线编程及仿真系统应用》课后习题.pdf
《焊接机器人离线编程及仿真系统应用》课后习题第一章虚拟现实与仿真技术1.(填空题)虚拟现实技术,是一种基于_____________的沉浸式交互环境。2.虚拟现实的三要素是:_______、_______、_______。3.系统仿真的基本步骤是:阐述问题和目标设定→_________→_________→仿真模型的确认→_________________→仿真模型的运行→仿真输出结果的统计分析。第二章机器人离线编程技术1.机器人语言等级通常分为_______、_______和_______。2.示教再现
《工业机器人离线编程与仿真》课程标准.pdf
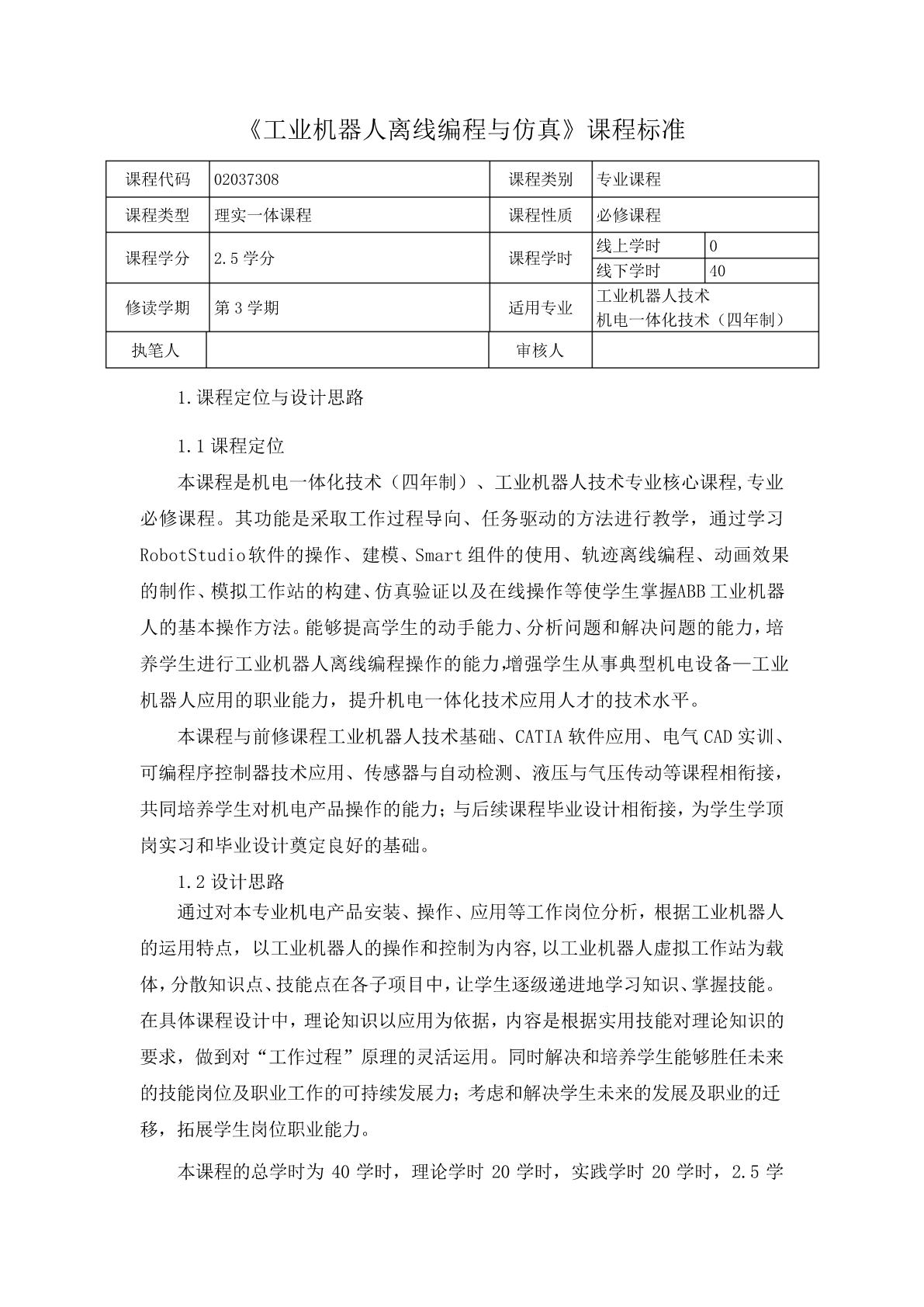
《工业机器人离线编程与仿真》课程标准课程代码02037308课程类别专业课程课程类型理实一体课程课程性质必修课程线上学时0课程学分2.5学分课程学时线下学时40工业机器人技术修读学期第3学期适用专业机电一体化技术(四年制)执笔人审核人1.课程定位与设计思路1.1课程定位本课程是机电一体化技术(四年制)、工业机器人技术专业核心课程,专业必修课程。其功能是采取工作过程导向、任务驱动的方法进行教学,通过学习RobotStudio软件的操作、建模、Smart组件的使用、轨迹离线编程、动画效果的制作、模拟工作站的构

工业机器人离线编程与仿真考试A卷(答案).pdf
…8.(B)、围栏、控制柜、一体PC机等由专业的SW、UG等第三方三维绘图软…工业机器人离线编程与仿真考试卷…A(答案)件绘制,再将绘制好的模型转存为IGS格式文件,存储在指定的文件夹,然后作为一个整…体的障碍物(【Obstacles】)导入ROBOGUIDE软件。……满分:120时间:90分钟(闭卷)9.下列说法不正确的是(B)……10.离线编程具有如下优点(B)…题号一二三四五六总分得分评卷人三、判断题:(正确的“√”,错误的“×”,每题2分,共…得分…10分)…特别提示:答案写在指定位置,否则不予得
工业机器人离线编程与仿真实训总结.pdf
工业机器人离线编程与仿真实训总结随着工业机器人在各个行业的应用越来越广泛,对工业机器人的离线编程与仿真实训的需求也越来越迫切。离线编程与仿真实训是指在实际工作环境之外,通过使用专业的软件进行机器人编程和仿真实训,从而提高机器人的编程效率和准确性。本文将对工业机器人离线编程与仿真实训进行总结和分析。工业机器人离线编程是指在实际生产环境之外,通过使用专业的机器人编程软件,对机器人进行编程。与现场编程相比,离线编程具有安全、高效、灵活等优势。通过离线编程,操作人员可以在不接触机器人的情况下,完成对机器人的编程任