
《工业机器人离线编程与仿真》课程标准.pdf

文库****品店

1/7
2/7
3/7

4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
《工业机器人离线编程与仿真》课程标准.pdf
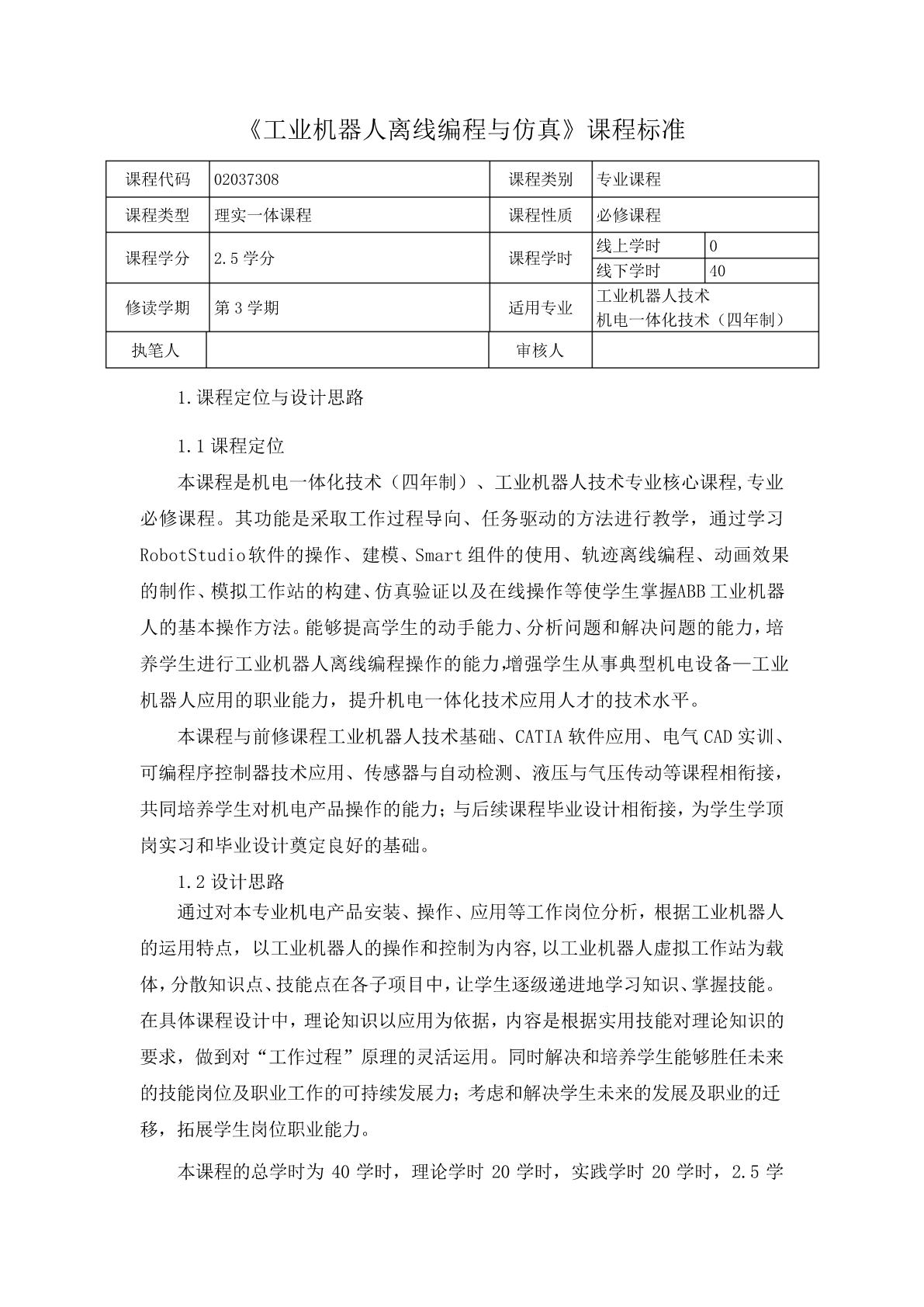
《工业机器人离线编程与仿真》课程标准课程代码02037308课程类别专业课程课程类型理实一体课程课程性质必修课程线上学时0课程学分2.5学分课程学时线下学时40工业机器人技术修读学期第3学期适用专业机电一体化技术(四年制)执笔人审核人1.课程定位与设计思路1.1课程定位本课程是机电一体化技术(四年制)、工业机器人技术专业核心课程,专业必修课程。其功能是采取工作过程导向、任务驱动的方法进行教学,通过学习RobotStudio软件的操作、建模、Smart组件的使用、轨迹离线编程、动画效果的制作、模拟工作站的构
《工业机器人系统离线编程与仿真》课程标准.pdf
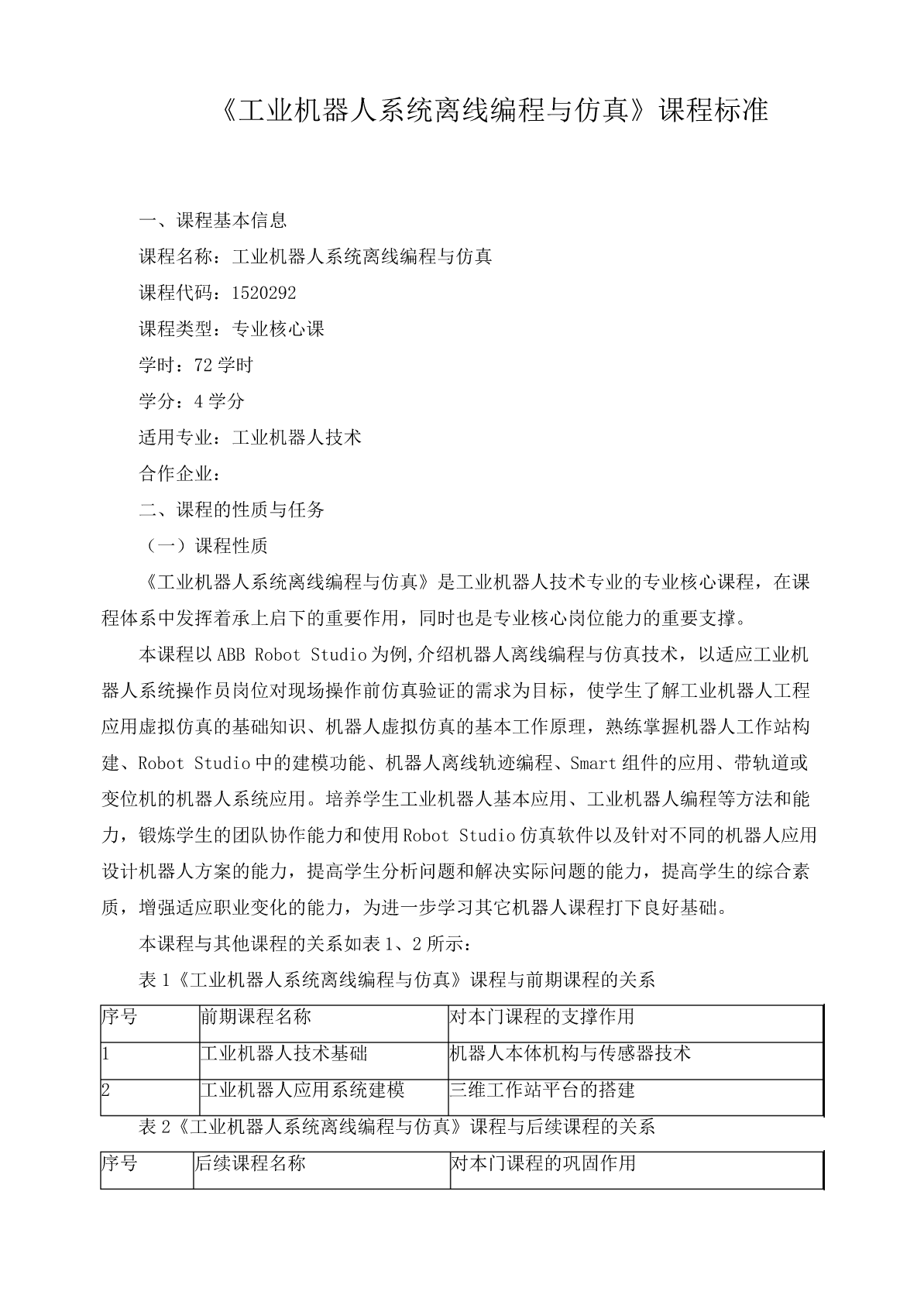
《工业机器人系统离线编程与仿真》课程标准一、课程基本信息课程名称:工业机器人系统离线编程与仿真课程代码:1520292课程类型:专业核心课学时:72学时学分:4学分适用专业:工业机器人技术合作企业:二、课程的性质与任务(一)课程性质《工业机器人系统离线编程与仿真》是工业机器人技术专业的专业核心课程,在课程体系中发挥着承上启下的重要作用,同时也是专业核心岗位能力的重要支撑。本课程以ABBRobotStudio为例,介绍机器人离线编程与仿真技术,以适应工业机器人系统操作员岗位对现场操作前仿真验证的需求为目标,
《工业机器人离线编程》课程标准.pdf
《工业机器人离线编程》课程标准课程名称工业机器人离线编程课程编码170105002C适用专业工业机器人技术学时/学分64/3课程标准编制人审定人本课程旨在提高学生在机器人方面的综合素质,着重使学生掌握从事机器人加工类企业中机器人工作所必备的知识和基本技能,初步形成处理实际问题的能力。培养其分析问题和解决问题的学习能力,具备继续学习专业技术的能力;在本课程的学习中渗透思想道德和职业素养等方面的教育,使学生形成认真负责的工作态度和严谨的工作作风,为后续课程学习和职业生涯的发展奠定基础。一、课程分析(一)教学计

《工业机器人离线编程》课程标准.doc
《工业机器人离线编程》课程标准课程名称工业机器人离线编程课程编码170105002C适用专业工业机器人技术学时/学分64/3课程标准编制人审定人本课程旨在提高学生在机器人方面的综合素质,着重使学生掌握从事机器人加工类企业中机器人工作所必备的知识和基本技能,初步形成处理实际问题的能力。培养其分析问题和解决问题的学习能力,具备继续学习专业技术的能力;在本课程的学习中渗透思想道德和职业素养等方面的教育,使学生形成认真负责的工作态度和严谨的工作作风,为后续课程学习和职业生涯的发展奠定基础。一、课程分析(一)教学计
工业机器人离线编程课程标准.pdf
工业机器人离线编程课程标准课程名称工业机器人离线编程课程编码2C适用专业工业机器人技术学时/学分64/3课程标准编制审定人本课程旨在提高学生在机器人方面的综合素质,着重使学生掌握从事机器人加工类企业中机器人工作所必备的知识和基本技能,初步形成处理实际问题的能力;培养其分析问题和解决问题的学习能力,具备继续学习专业技术的能力;在本课程的学习中渗透思想道德和职业素养等方面的教育,使学生形成认真负责的工作态度和严谨的工作作风,为后续课程学习和职业生涯的发展奠定基础;一、课程分析一教学计划的制定和教学内容的选取根