
《工业机器人离线编程与仿真》试卷3套(含答案).pdf

文库****品店

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
《工业机器人离线编程与仿真》试卷3套(含答案).pdf
《工业机器人离线编程与仿真》试卷3套(含答案)考场:专业:姓名:考生号:班级:不要在密封线内答题20XX-20XX学年第X学期《工业机器人离线编程与仿真》期末考试试卷题号一二三总分得分一、填空题:(每空2分,共30分。请将正确的答案填在空格里)1.使用RobotStudio6.03在线编辑I/O信号时创建一个I/O单元DSQC651,首先要在功能选择卡中单击然后在示教器中单击进行确认。通过键盘、鼠标调整机器人工作站视图,平移:+;改变视角:++鼠标左键;缩放:。3.ABB仿真软件RobotStudio6.
工业机器人离线编程与仿真考试试卷答案.pdf
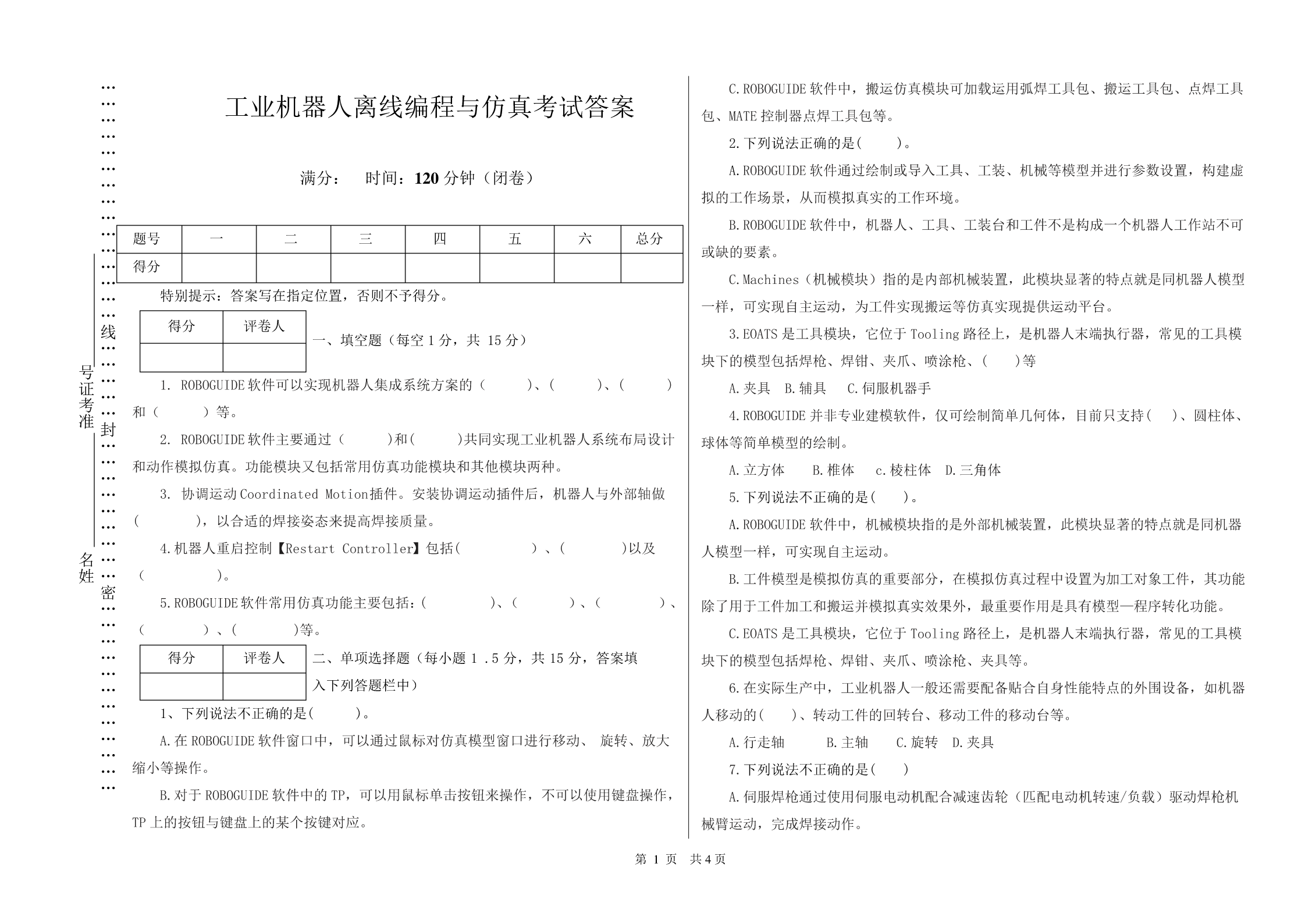
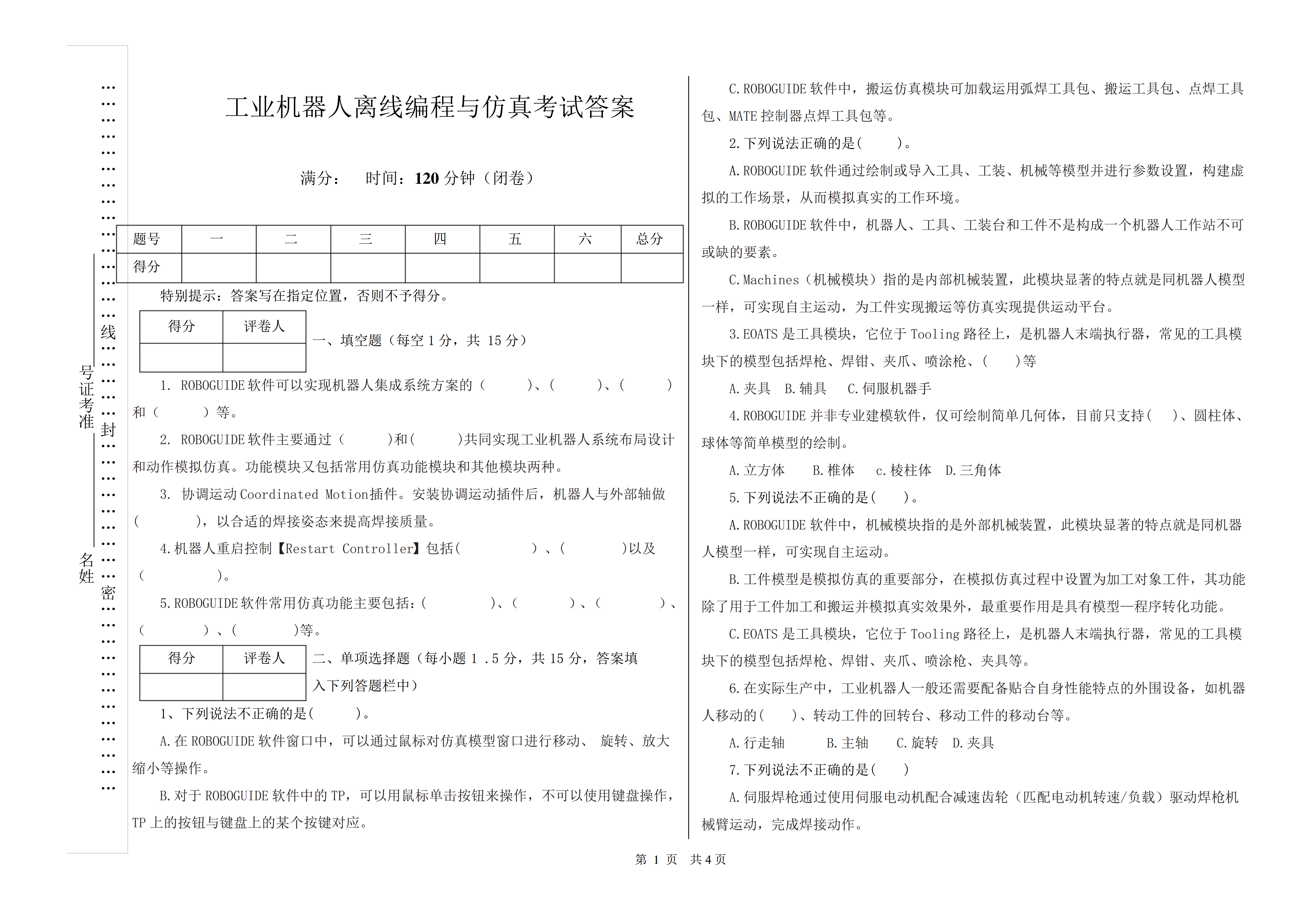
…C.ROBOGUIDE软件中,搬运仿真模块可加载运用弧焊工具包、搬运工具包、点焊工具…工业机器人离线编程与仿真考试答案…包、MATE控制器点焊工具包等。…2.下列说法正确的是()。……A.ROBOGUIDE软件通过绘制或导入工具、工装、机械等模型并进行参数设置,构建虚…满分:时间:120分钟(闭卷)…拟的工作场景,从而模拟真实的工作环境。…B.ROBOGUIDE软件中,机器人、工具、工装台和工件不是构成一个机器人工作站不可…题号一二三四五六总分…或缺的要素。…得分C.Machines(机械模块)指的是内

工业机器人离线编程与仿真课后习题.pdf
第一章ROBOGUIDE概述一、填空题①ROBOGUIDE软件常用仿真功能主要包括:工件加工仿真(ChamferingPRO)、物料搬运仿真(HandlingPRO)、工艺仿真(WeldPRO)、码垛仿真(PalletPRO)、喷涂仿真(PaintPRO)等。②ROBOGUIDE软件中,搬运仿真模块可加载运用弧焊工具包、搬运工具包、点焊工具包、MATE控制器点焊工具包等。③ROBOGUIDE软件菜单栏主要分文件、编辑、视图、元素和机器人等共11个菜单选项。④在ROBOGUIDE软件窗口中,读者可以通过鼠标
工业机器人离线编程与仿真考试试卷答案.pdf
…C.ROBOGUIDE软件中,搬运仿真模块可加载运用弧焊工具包、搬运工具包、点焊工具…工业机器人离线编程与仿真考试答案…包、MATE控制器点焊工具包等。…2.下列说法正确的是()。……A.ROBOGUIDE软件通过绘制或导入工具、工装、机械等模型并进行参数设置,构建虚…满分:时间:120分钟(闭卷)…拟的工作场景,从而模拟真实的工作环境。…B.ROBOGUIDE软件中,机器人、工具、工装台和工件不是构成一个机器人工作站不可…题号一二三四五六总分…或缺的要素。…得分C.Machines(机械模块)指的是内
《工业机器人离线编程与仿真》课程标准.pdf
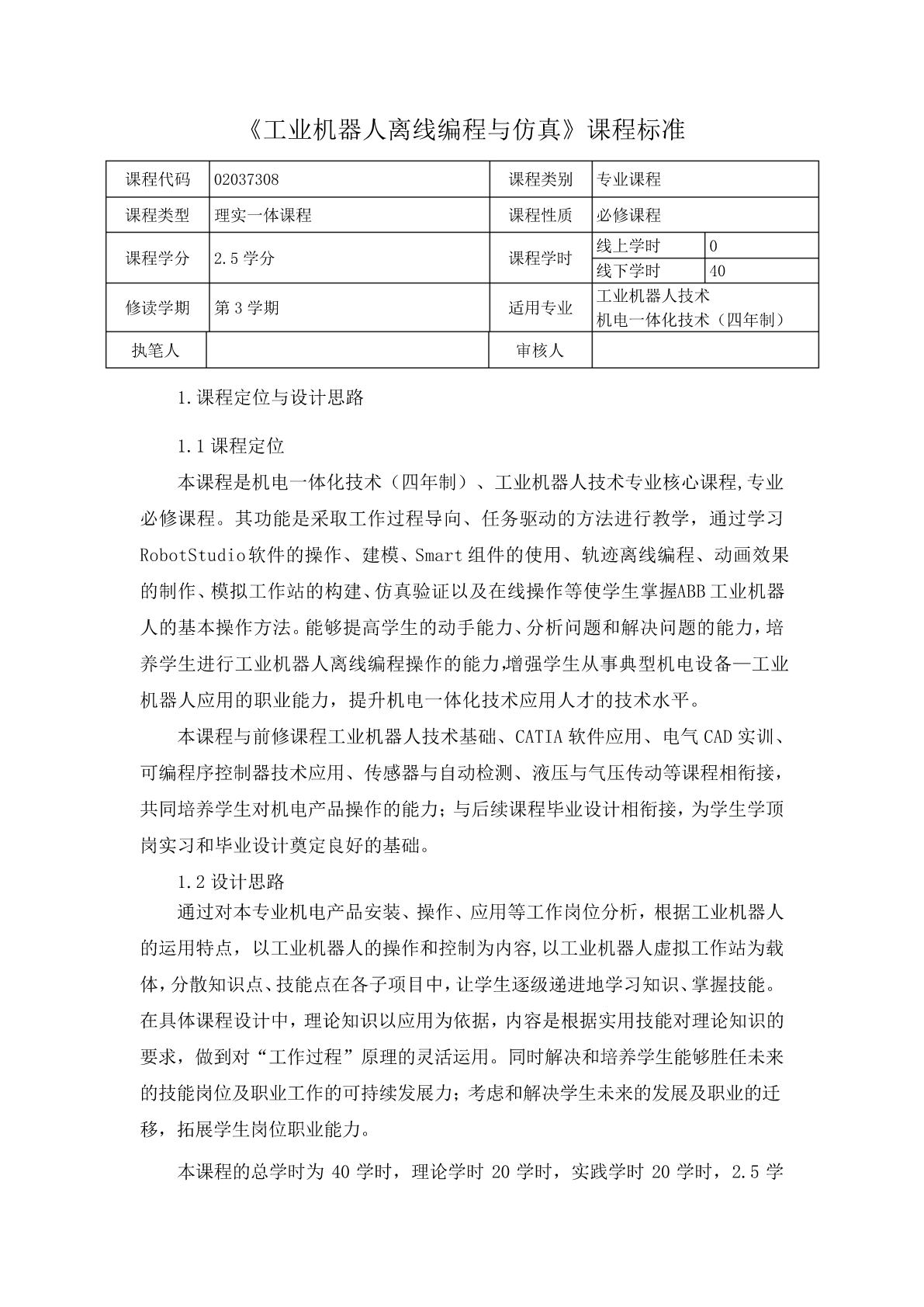
《工业机器人离线编程与仿真》课程标准课程代码02037308课程类别专业课程课程类型理实一体课程课程性质必修课程线上学时0课程学分2.5学分课程学时线下学时40工业机器人技术修读学期第3学期适用专业机电一体化技术(四年制)执笔人审核人1.课程定位与设计思路1.1课程定位本课程是机电一体化技术(四年制)、工业机器人技术专业核心课程,专业必修课程。其功能是采取工作过程导向、任务驱动的方法进行教学,通过学习RobotStudio软件的操作、建模、Smart组件的使用、轨迹离线编程、动画效果的制作、模拟工作站的构