
李雅普诺夫方法.ppt

胜利****实阿


1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共48页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
李雅普诺夫方法.ppt
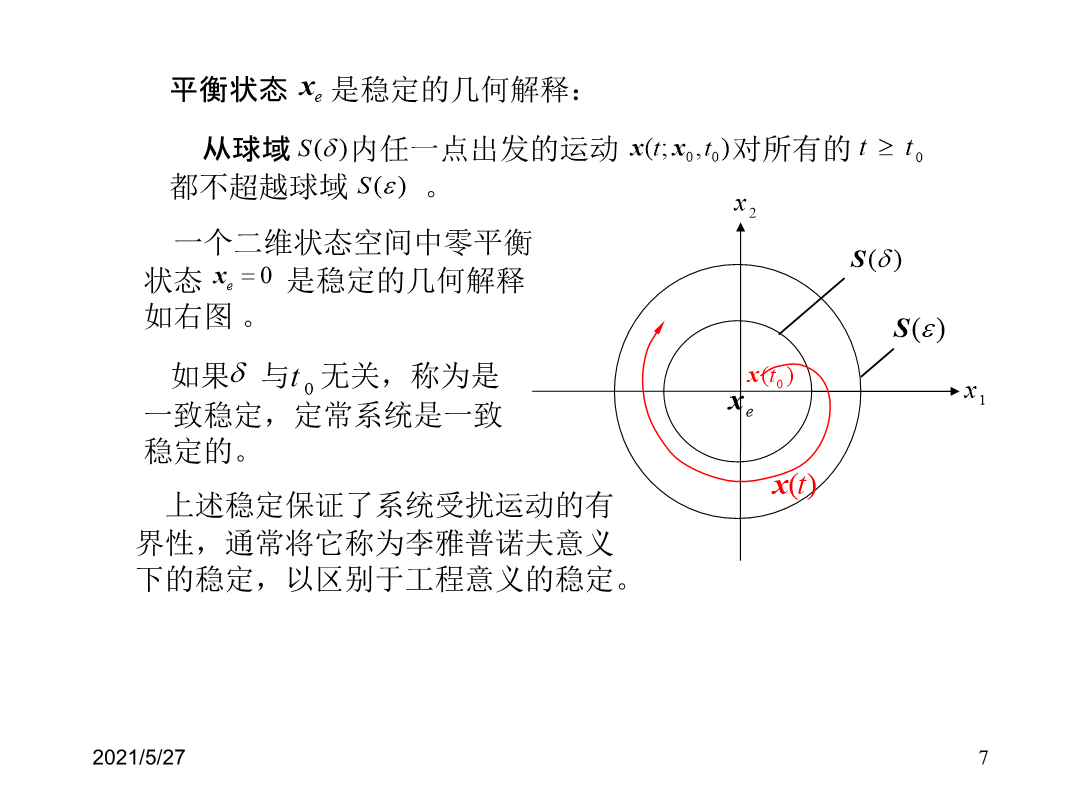
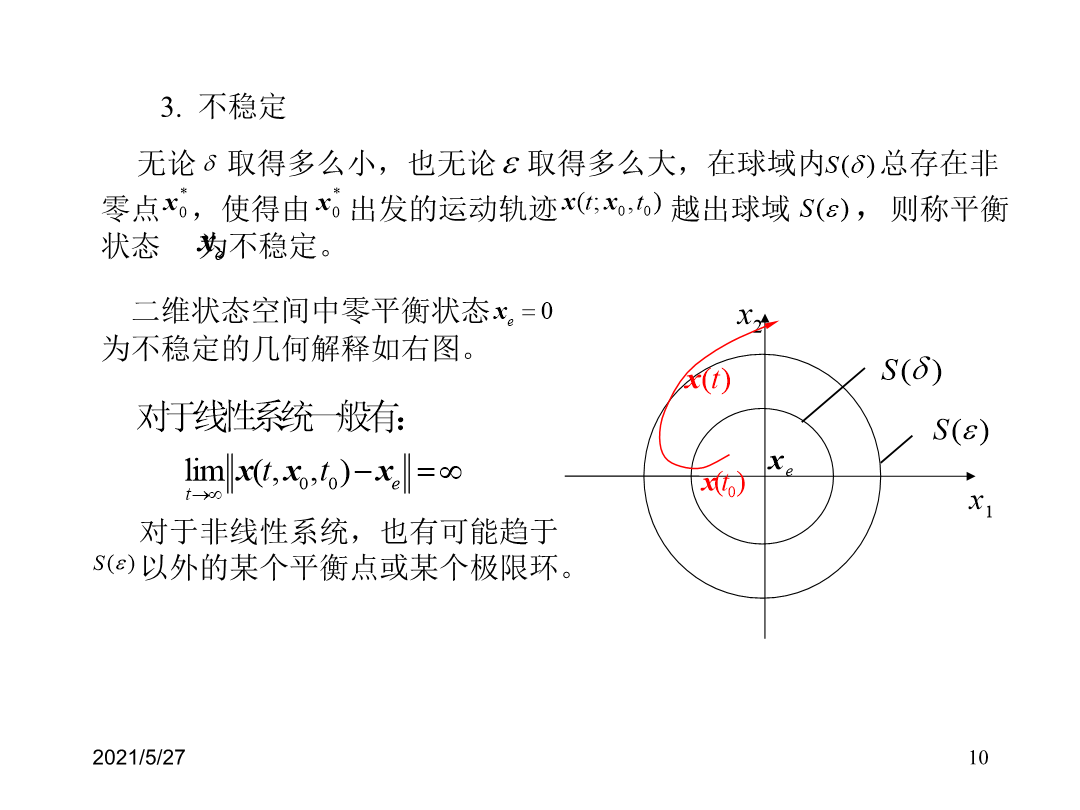
第三章动态系统的稳定性及李雅普诺夫分析方法如果由非零初始状态引起的系统自由运动有界,即:二、李亚普诺夫稳定性基本概念对非线性系统,一般有多个平衡状态。可以将下式看成为状态空间中以为球心,以为半径的一个超球体,球域记为;把上式视为以为球心,以为半径的一个超球体,球域记为。球域依赖于给定的实数和初始时间。从球域内任一点出发的运动对所有的都不超越球域。满足渐近稳定的球域只是状态空间中的有限部分,这时称平衡状态为局部渐近稳定,并且称为渐近稳定吸引区,表示只有从该区域出发的受扰运动才能被“吸引”至平衡状态。3.不稳

李雅普诺夫方法.ppt
章动态系统的稳定性及李雅普诺夫如果由非零初始状态引起的系统自由运动有界,即:二、李亚普诺夫稳定性基本概念对非线性系统,一般有多个平衡状态。可以将下式看成为状态空间中以为球心,以为半径的一个超球体,球域记为;把上式视为以为球心,以为半径的一个超球体,球域记为。球域依赖于给定的实数和初始时间。从球域内任一点出发的运动对所有的都不超越球域。满足渐近稳定的球域只是状态空间中的有限部分,这时称平衡状态为局部渐近稳定,并且称为渐近稳定吸引区,表示只有从该区域出发的受扰运动才能被“吸引”至平衡状态。3.不稳定单摆是Ly

李雅普诺夫方法.ppt
第三章动态系统的稳定性及李雅普诺夫分析方法如果由非零初始状态引起的系统自由运动有界,即:二、李亚普诺夫稳定性基本概念对非线性系统,一般有多个平衡状态。可以将下式看成为状态空间中以为球心,以为半径的一个超球体,球域记为;把上式视为以为球心,以为半径的一个超球体,球域记为。球域依赖于给定的实数和初始时间。从球域内任一点出发的运动对所有的都不超越球域。满足渐近稳定的球域只是状态空间中的有限部分,这时称平衡状态为局部渐近稳定,并且称为渐近稳定吸引区,表示只有从该区域出发的受扰运动才能被“吸引”至平衡状态。3.不稳
稳定性与李雅普诺夫方法.pptx
3、现代控制理论判稳方法:[俄]李雅普诺夫稳定性理论是稳定性判定的通用方法,适用于各种系统。4.1基本定义二、平衡状态2、非线性系统四、稳定性的定义若的稳定性(渐近稳定)不依赖于,则称其为一致稳定(渐近稳定)。4.2李雅普诺夫第一法例:已知试分析系统的状态稳定性与输出稳定性。解:(1)由状态传递函数其传递函数的极点为:有极点在s平面的左半平面,所以系统的状态不是渐进稳定的。(2)由输出传递函数其传递函数的极点为:没有极点在s平面的左半平面。所以系统的输出是稳定的。二、非线性系统的稳定性设系统的状态空间表达
稳定性与李雅普诺夫方法.ppt
第4章稳定性与李雅普诺夫方法4.1李雅普诺夫关于稳定性的定义平衡状态不一定存在,也不一定唯一。如:其平衡状态有:稳定性是相对于平衡点而言的!4.1.2稳定性的几个定义1.Lyapunov意义下的稳定2.渐近稳定若,则称为大范围(全局)渐近稳定。对于某个实数和任意,在超球域内始终存在状态,使得从该状态开始的运动轨迹要突破超球域。此三个图分别表示平衡状态为稳定、渐近稳定和不稳定时初始扰动所引起的典型轨迹。4.2李雅普诺夫第一法线性定常系统,在平衡状态渐近稳定的充要条件是矩阵A的所有特征值均具有负实部。此为状态